



之前搞相机与IMU的时间同步基本都是硬件时间同步,然后看视频学习到一些软件时间同步的方法,很好奇就搜了一下 又没时间(懒)写全自己的理解 感觉也比较简单 蛮把一些关键的记录一下省得之后不记得专有名词就不知道怎么搜了....
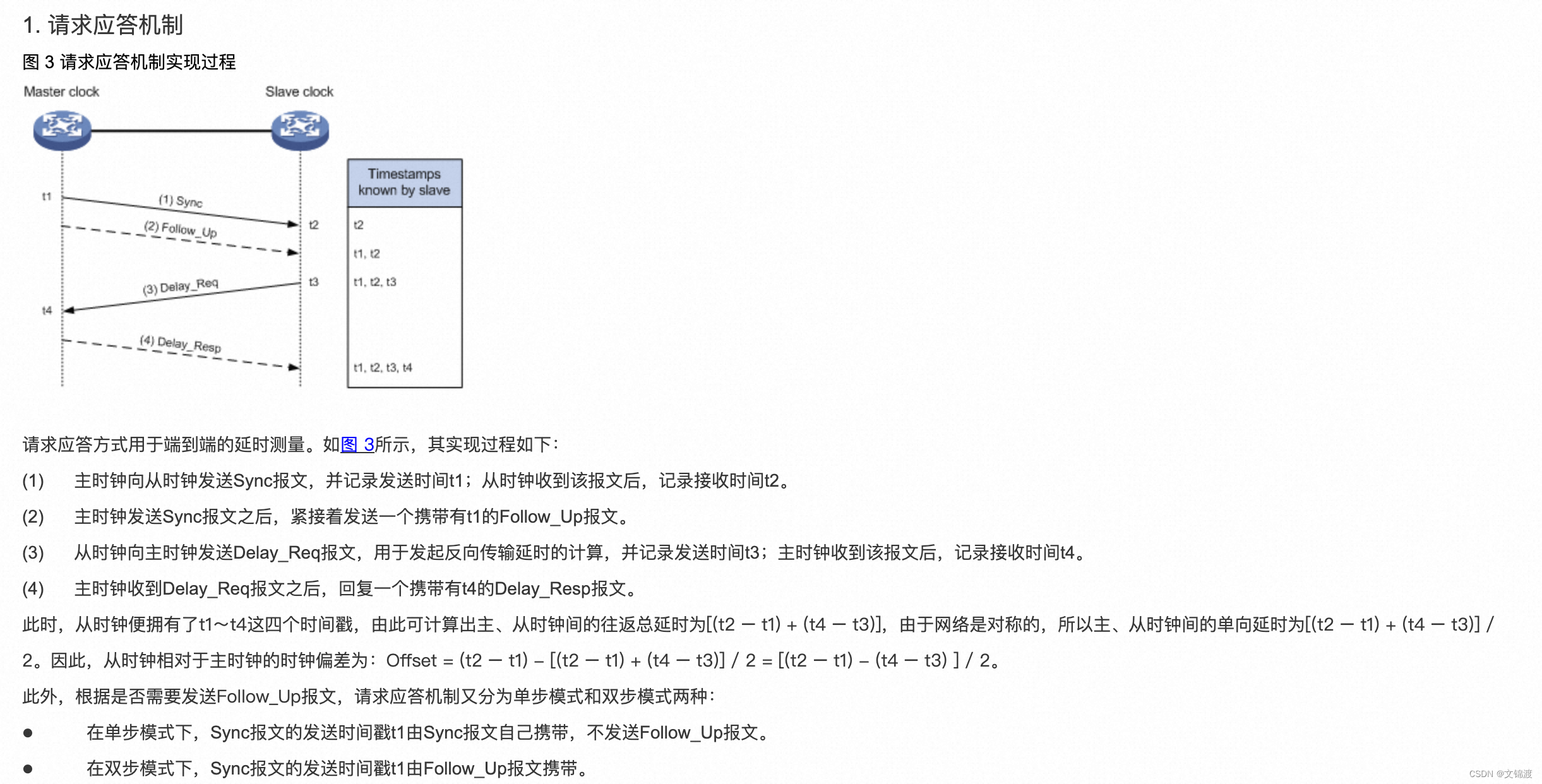
其实核心就是多考虑了发射t1的时间并不能存在t1的数据里,所以记录t1时间在t2的数据中发送
PTP
NTP
时间同步原理 - CloudEngine 12800, 12800E V200R005C10 配置指南-设备管理 - 华为
时钟同步原理 - CloudEngine 12800, 12800E V200R005C10 配置指南-设备管理 - 华为
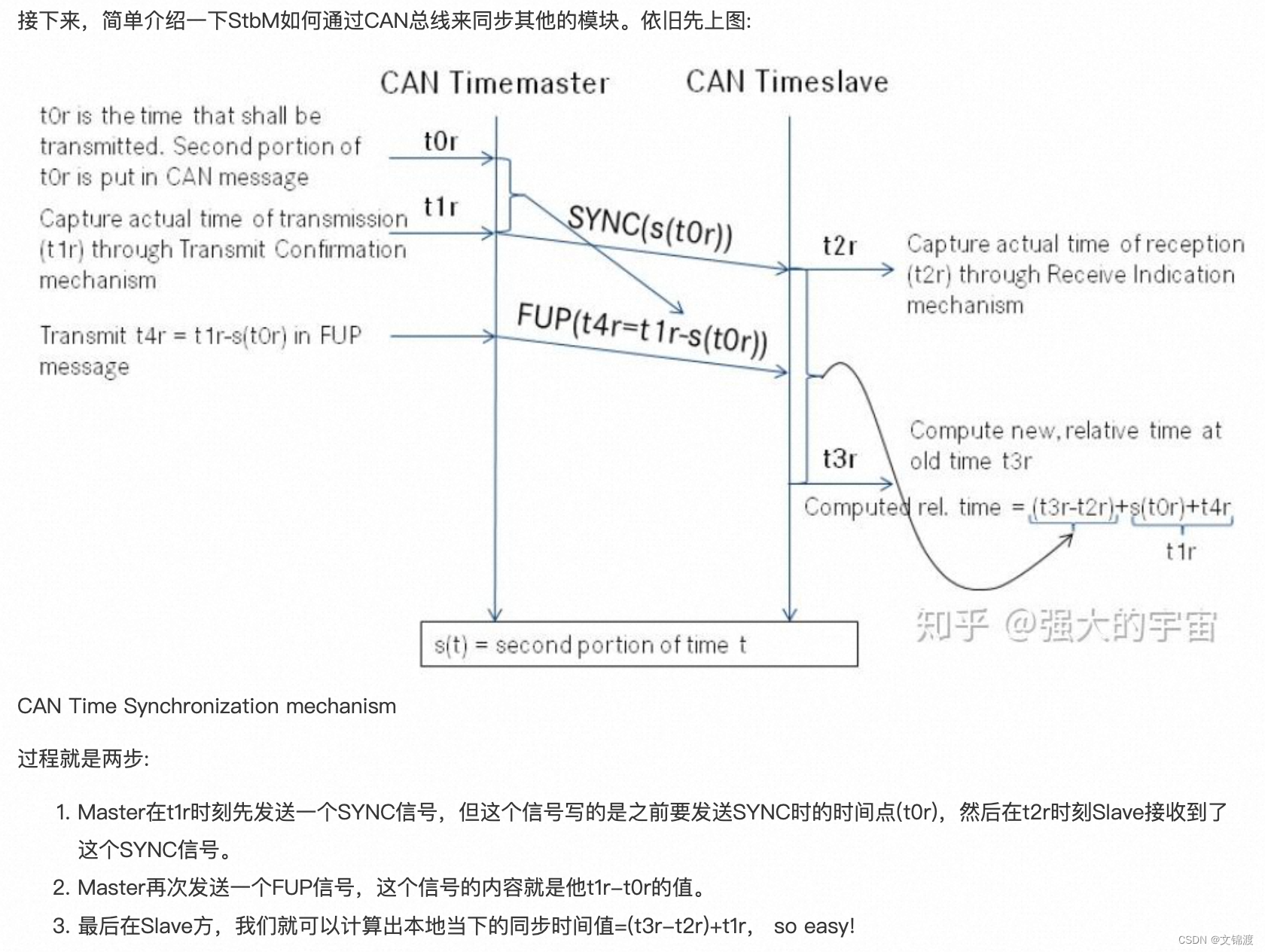
CanTsyn
AUTOSAR基础篇之CanTsyn_autosar时间同步_汽车小T的博客-优快云博客
https://www.cnblogs.com/macro-c/p/15562628.html
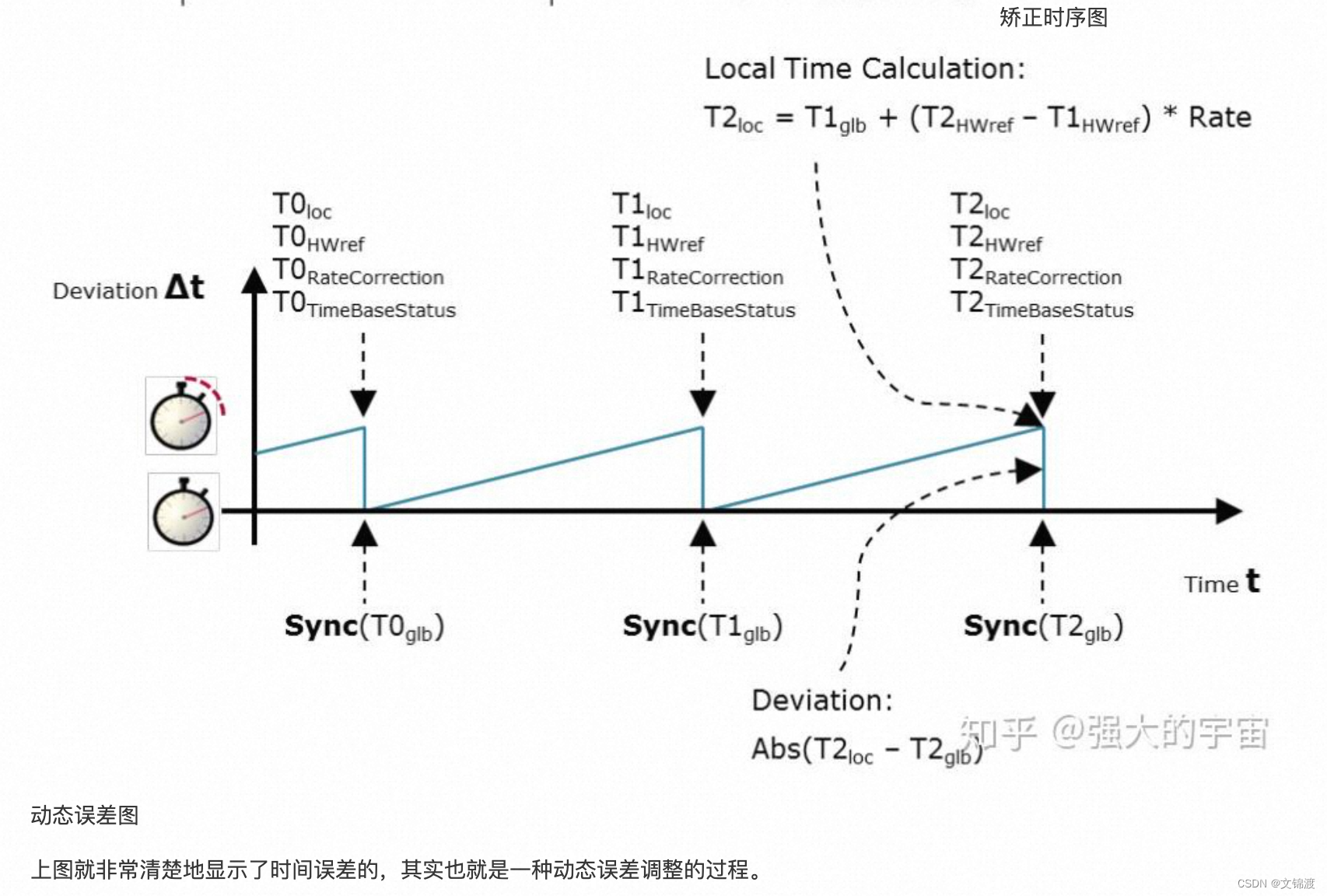
时间误差模型建立
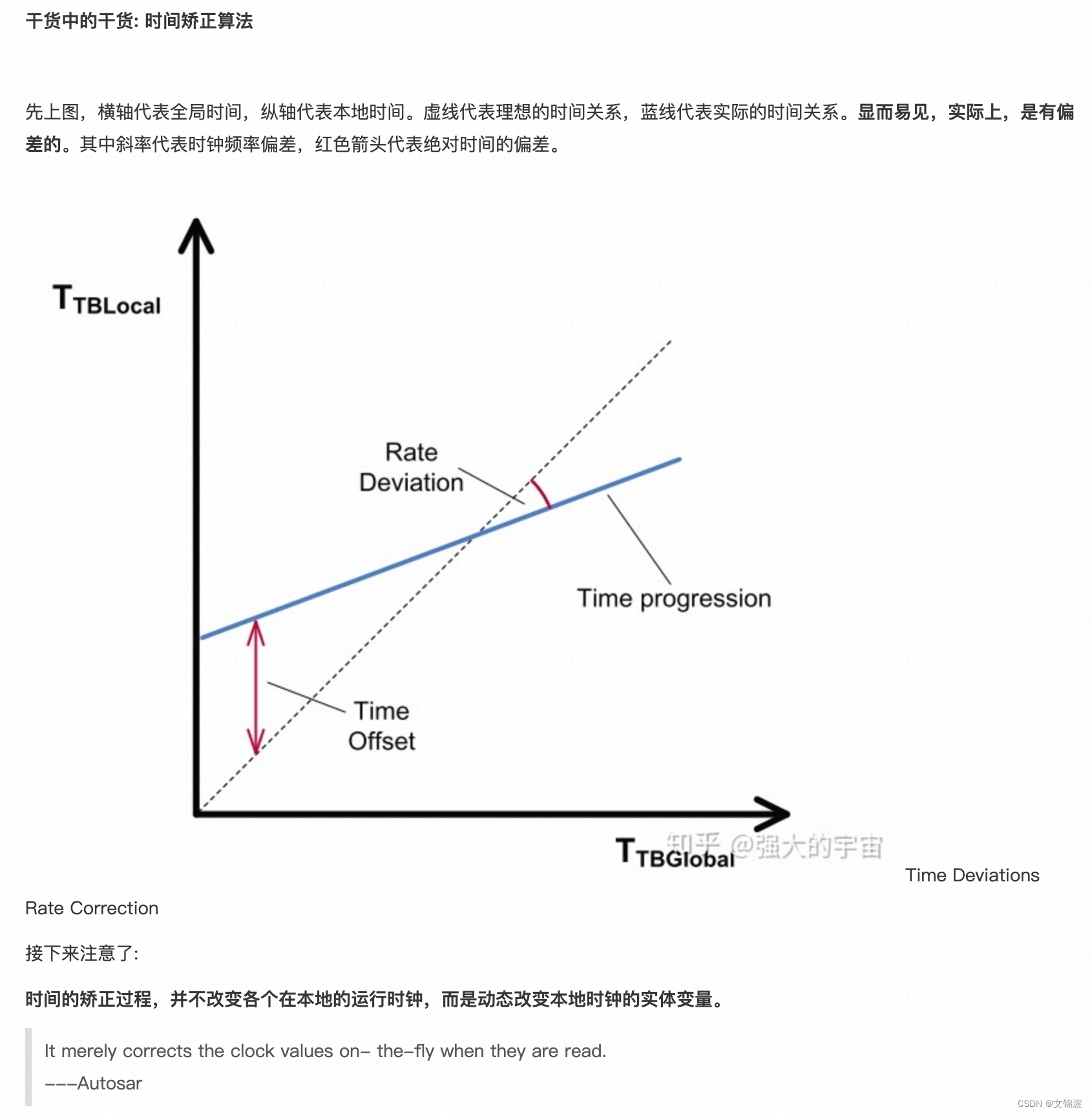
时间矫正模型

















 523
523

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









