



 本文深入探讨了隐马尔科夫模型的核心原理,包括序列组合、联合似然函数、贝叶斯计量求解、时间与测量更新,以及算法流程。通过数学公式详细解析了模型如何基于观测序列进行状态估计,适用于信号处理、语音识别等领域。
本文深入探讨了隐马尔科夫模型的核心原理,包括序列组合、联合似然函数、贝叶斯计量求解、时间与测量更新,以及算法流程。通过数学公式详细解析了模型如何基于观测序列进行状态估计,适用于信号处理、语音识别等领域。
1、给定的序列组合
当前状态xnx_nxn仅取决于最近的过去的状态xn−1x_{n-1}xn−1,通过状态过度分布p(xn∣xn−1)p(x_n|x_{n-1})p(xn∣xn−1),初始态x0x_0x0是分布式的,根据
p(x0∣y0)=p(x0)p(x_0|y_0)=p(x_0)p(x0∣y0)=p(x0)
2、联合似然函数
观测值y1,y2,...,yny_1,y_2,...,y_ny1,y2,...,yn仅条件依赖于相应的状态x1,x2,...,xnx_1,x_2,...,x_nx1,x2,...,xn;这一假设意味着观测值的条件联合似然函数如下:
l(y1,y2,...,yn∣x1,x2,...,xn)=∏i=1nl(yi∣xi)l(y_1,y_2,...,y_n|x_1,x_2,...,x_n)=\prod _{i=1}^n l(y_i|x_i)l(y1,y2,...,yn∣x1,x2,...,xn)=i=1∏nl(yi∣xi)
后验分布p(xn∣yn)p(x_n|y_n)p(xn∣yn)在贝叶斯分析至关重要,包含在n时刻,已经接收整个观测序列YnY_nYn的条件下,关于xnx_nxn的全部知识。包含了所有状态估计的必要信息。
3、根据贝叶斯计量求解
例如希望决定状态xnx_nxn满足最小均方误差时的最优滤波估计,需要解:
x^n∣n=Ep[xn∣yn]=∫xnp(xn∣Yn)dxn\hat x_{n|n}=E_p[x_n|y_n]=\int x_np(x_n|Y_n)dx_nx^n∣n=Ep[xn∣yn]=∫xnp(xn∣Yn)dxn
为了滤波估计x^n∣n−1\hat x_{n|n-1}x^n∣n−1精度的评估,计算协方差矩阵:
Pn∣n=Ep[(xn−x^n∣n)(xn−x^n∣n)T]=∫(xn−x^n∣n)(xn−x^n∣n)Tp(xn∣Yn)dxnP_{n|n}=E_p[(x_n-\hat x_{n|n})(x_n-\hat x_{n|n})^T]=\int (x_n-\hat x_{n|n})(x_n-\hat x_{n|n})^Tp(x_n|Y_n)dx_nPn∣n=Ep[(xn−x^n∣n)(xn−x^n∣n)T]=∫(xn−x^n∣n)(xn−x^n∣n)Tp(xn∣Yn)dxn
4、总结
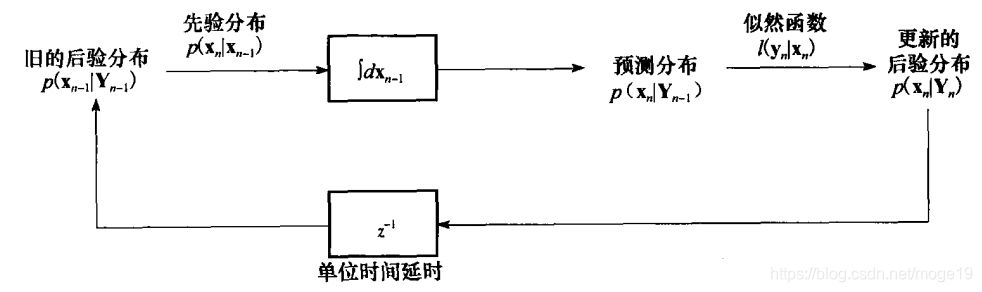
4.1 时间更新
给定观测序列Yn−1Y_{n-1}Yn−1,计算xnx_nxn的预测分布,如下所示:
p(xn∣Yn−1=∫p(xn∣xn−1)p(xn−1∣Yn−1)dxn−1p(x_n|Y_{n-1}=\int p(x_n|x_{n-1})p(x_{n-1|Y_{n-1}})dx_{n-1}p(xn∣Yn−1=∫p(xn∣xn−1)p(xn−1∣Yn−1)dxn−1
4.2 测量更新
p(xn∣Yn)=1Znp(xn∣Yn−1)l(yn∣xn)p(x_n|Y_n)=\frac{1}{Z_n}p(x_n|Y_{n-1})l(y_n|x_n)p(xn∣Yn)=Zn1p(xn∣Yn−1)l(yn∣xn)
其中
Zn=p(yn∣yn−1)=∫l(yn∣xn)p(xn∣Yn−1)dxnZ_n=p(y_n|y_{n-1})=\int l(y_n|x_n)p(x_n|Y_{n-1})dx_nZn=p(yn∣yn−1)=∫l(yn∣xn)p(xn∣Yn−1)dxn
5 算法框图

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









