






 本文介绍了使用对抗神经网络(GAN)进行图像去雨的方法,创新点在于提出了一种新的损失函数和生成器结构。生成器通过Dense+transition层转换有雨图像为无雨图像,而辨别器则负责区分真实无雨图像和生成的图像以优化生成器。此外,还引入了感知损失以提高图像质量。该方法在当时的期刊会议中可能是首次应用于去雨任务,并且使用了感知损失这一不常见的技术,但其实际效果有待进一步研究。
本文介绍了使用对抗神经网络(GAN)进行图像去雨的方法,创新点在于提出了一种新的损失函数和生成器结构。生成器通过Dense+transition层转换有雨图像为无雨图像,而辨别器则负责区分真实无雨图像和生成的图像以优化生成器。此外,还引入了感知损失以提高图像质量。该方法在当时的期刊会议中可能是首次应用于去雨任务,并且使用了感知损失这一不常见的技术,但其实际效果有待进一步研究。
0 基本信息
时间:2017
期刊会议级别:IEEE
亮点:使用对抗神经网络GAN;新的损失函数
1、生成器(Generator with Symmetric Structure)
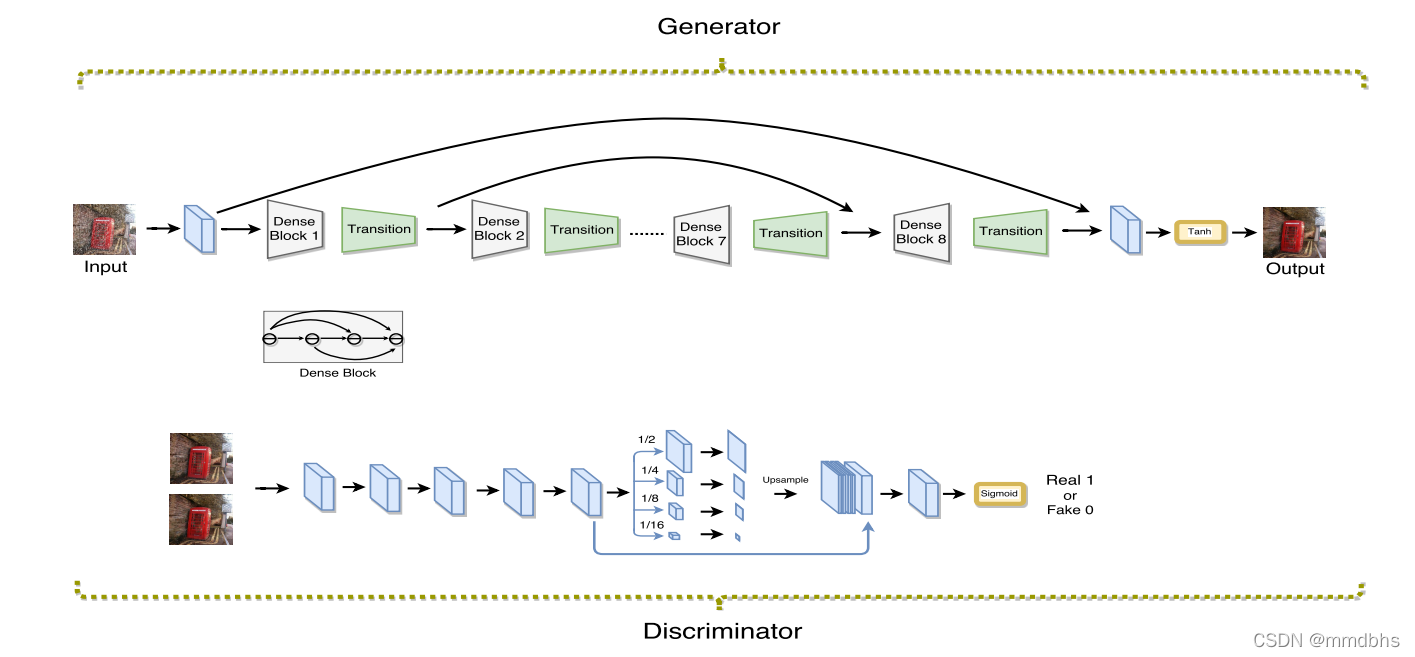
生成器为图片中的上半部分,功能为将有雨的图像转化为无雨图像,图片进入网络之后,会依次经过N个 (Dense+transition)。
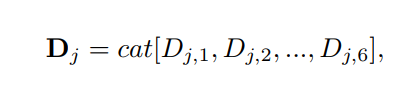
每个Dense将由n*layer组成,这些layer是平行存在的,每个layer包括三个步骤: batch normalization (BN), leaky rectified linear units (LReLU) and a 3×3 convolution。最后n个layer 叠加在一起:
transition主要为以下三个步骤当中的其中一个:up-sampling (Tu), down-sampling (T d) or no-sampling operation (T n)。
论文中每个层使用细节,如下表所示:
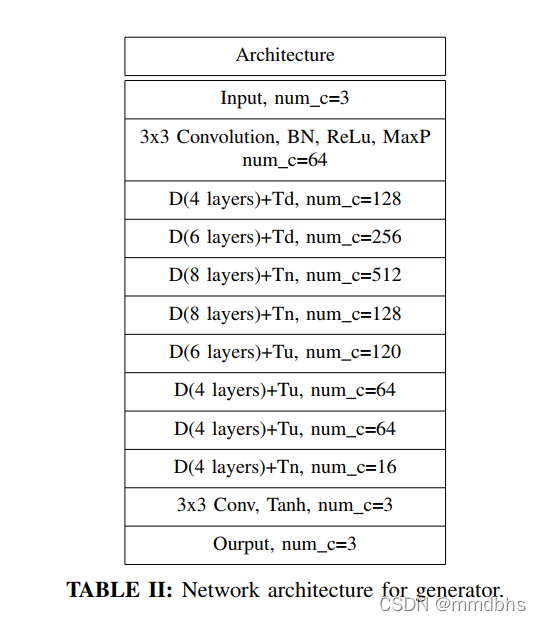
同时,各个dense之间也采用一种类似于残差网络的形式,将细节信息保留下来,具体可以查看论文:Densely connected convolutional networks。
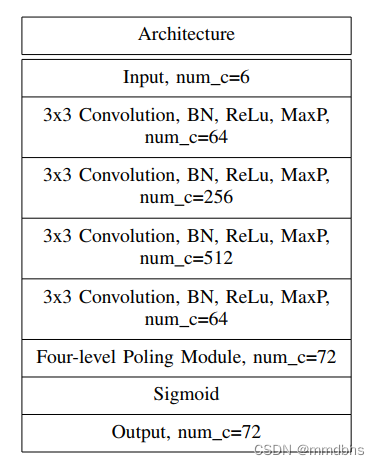
2 辨别器(Multi-scale Discriminator)
辨别器为图中下半部分,功能为通过将真实的无雨图像和生成器生成的无雨图像区分来,来不断优化生成器的参数。辨别器的网络比较简单,就是一个端到端的网络,前面是一些顺序的卷积神经网络,中间加入了一次多尺度感知的网络。结合如下网络细节,即可看到网络全貌:
3 生成器损失
生成器的损失,由三部分组成,LE是传统的基于像素点的损失,例如欧几里得损失(Euclidean loss),LA是对抗损失,由辨别器指导。LP为感性损失(perceptual loss ),其实就是在欧几里得损失上加一个非线性的卷积神经网络,参考论文:Perceptual losses for realtime style transfer and super-resolution


4 感悟
1、本文为作者看的第一篇关于GAN的文章,所以看的时候需要查阅很多其他论文和教程,看的非常艰难,截止到写这篇文章,还是没有搞懂GAN的细节部分,应该需要去代码里面寻找了。
2、本文使用GAN作为去雨的网络,在当时应该是常见期刊会议中首次用在去雨模型当中,取得了不错的效果。
3、本文当中使用的perceptual loss,在其他去雨论文中不多见,不知道是否真的有较好的影响。

















 3400
3400

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









