







写在前面:仅作为博主自我提示
参考博主https://blog.youkuaiyun.com/u014610460/article/details/81588105的文章,虽然博客上没有详细的解说,好在附上了代码地址:https://github.com/WelinLee/ROS_QT_GUI。
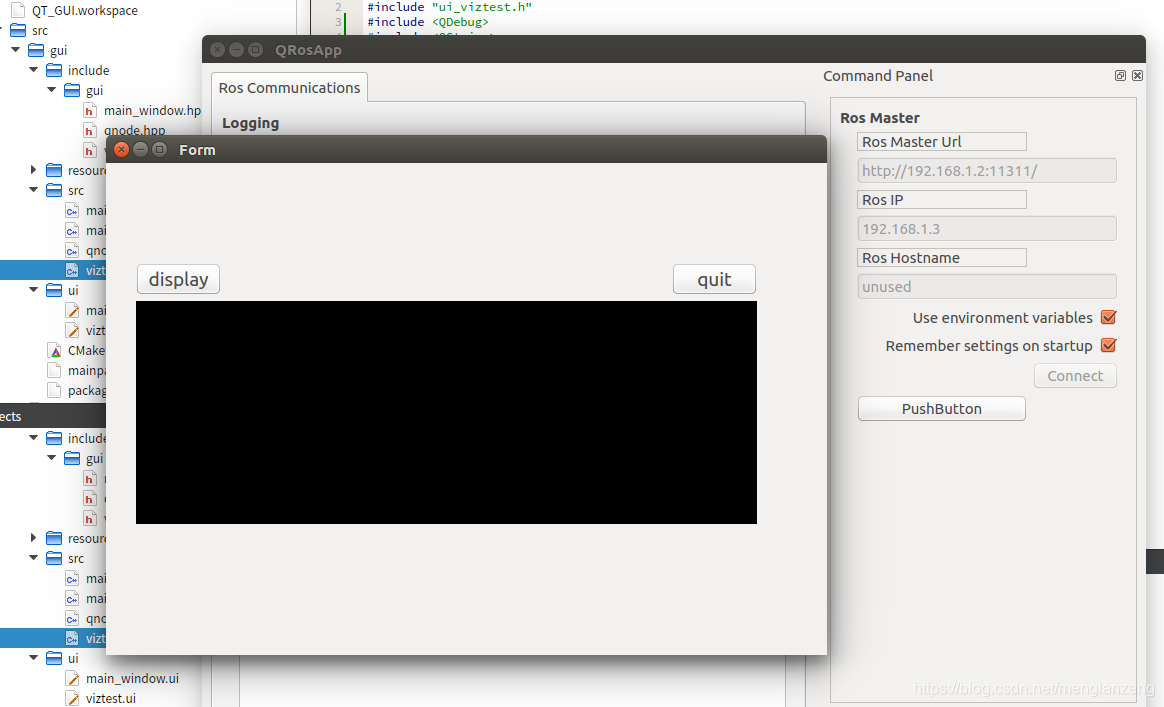
说实话,我没有成功地做出和上面博主完全一样的界面。我用的Qt5.9.1 creator,在qt上创建工作空间,然后用命令catkin_create_qt_pkg 创建了一个带界面的功能包,然后再在功能包上添加界面widget,(说起来好像很复杂,其实就像博客https://blog.youkuaiyun.com/qq_30460905/article/details/79210300一样),主要记得修改CMakelist.txt和package 文件。
参考librviz的官方教程和上面提及的ROS_QT_GUI,仅做稍许更改,
如果出现界面,但是界面没有任何显示(黑乎乎的一块,不要慌张),因为这个界面程序是以TOPIC为信号的,所以需要启动机器人的相应信号。当地图显示程序接收到“/map”的信号时,就有输出了。
然后我用了rbx_nav 功能,roslaunch rbx1_nav fake_amcl.launch; 运行以后用rostopic list 查看就
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 7454
7454

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









