




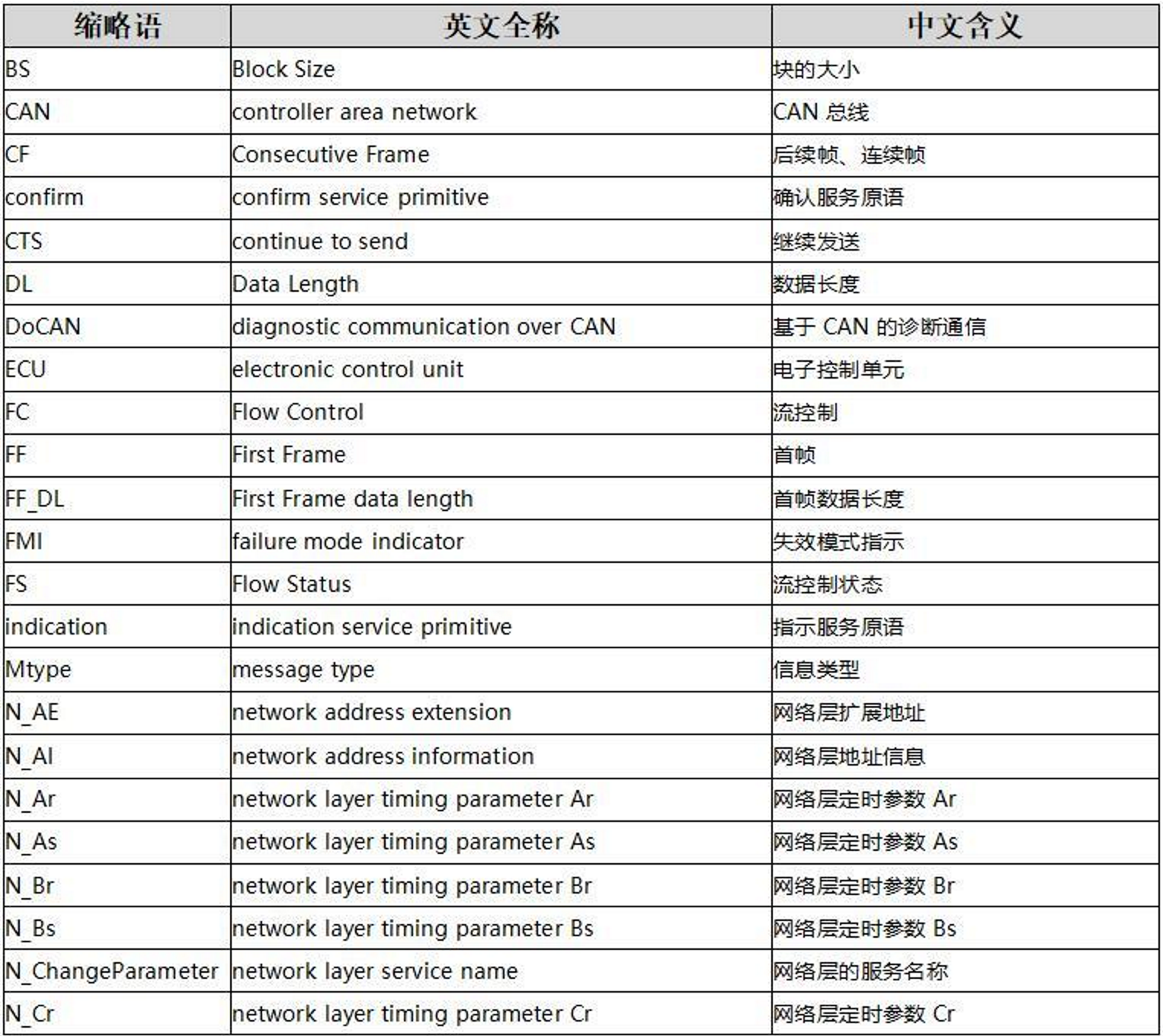
1.各种参数缩写
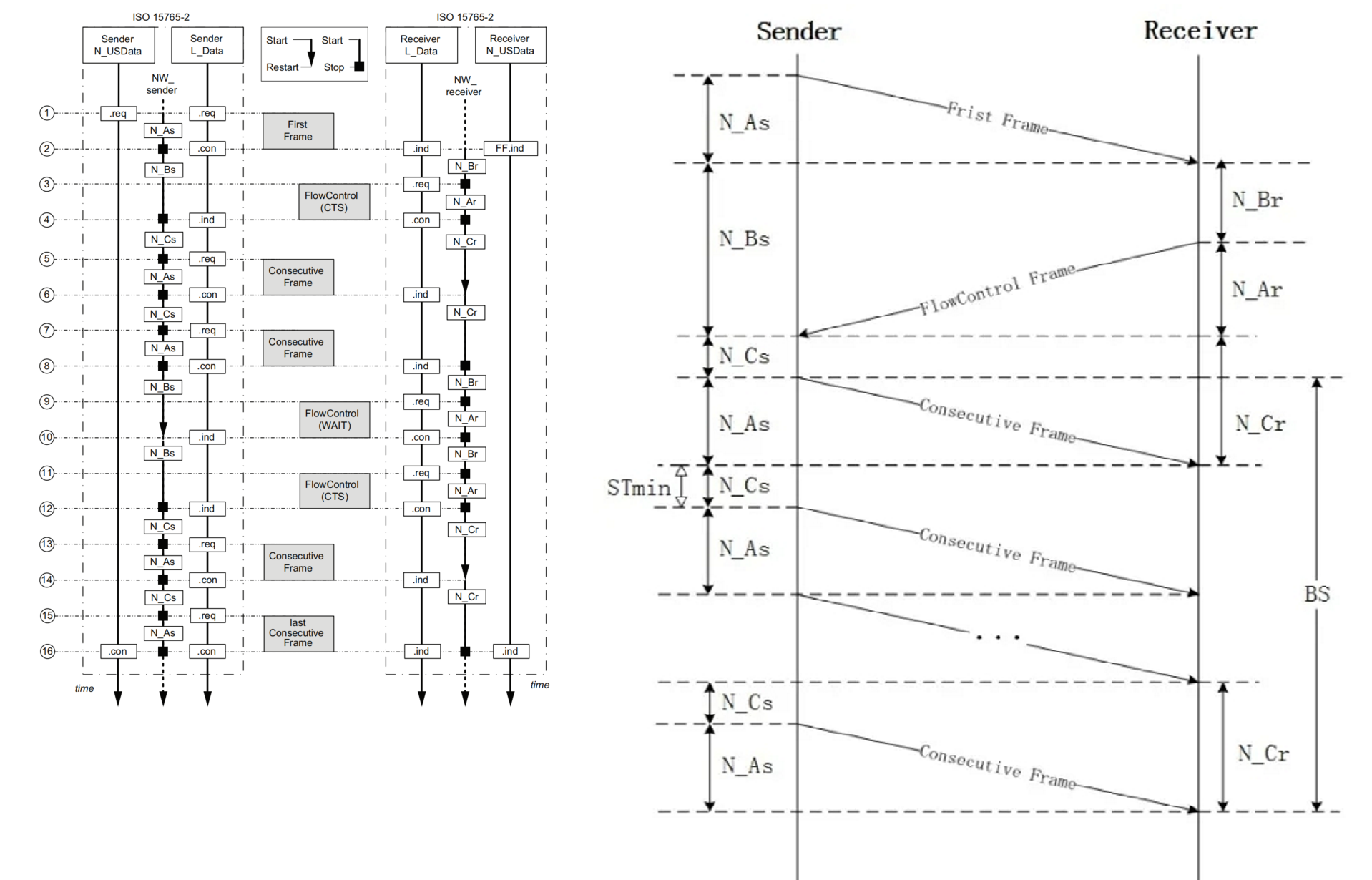
2.多帧传输时间参数解析
- Sender(左侧)
指的是 多帧数据的发送者,也就是:
ECU(被测系统 / 响应方)
- Receiver(右侧)
指的是 多帧数据的接收者,也就是:
诊断测试仪(如 CANoe + VN/VX 接口 / OEM 工具)
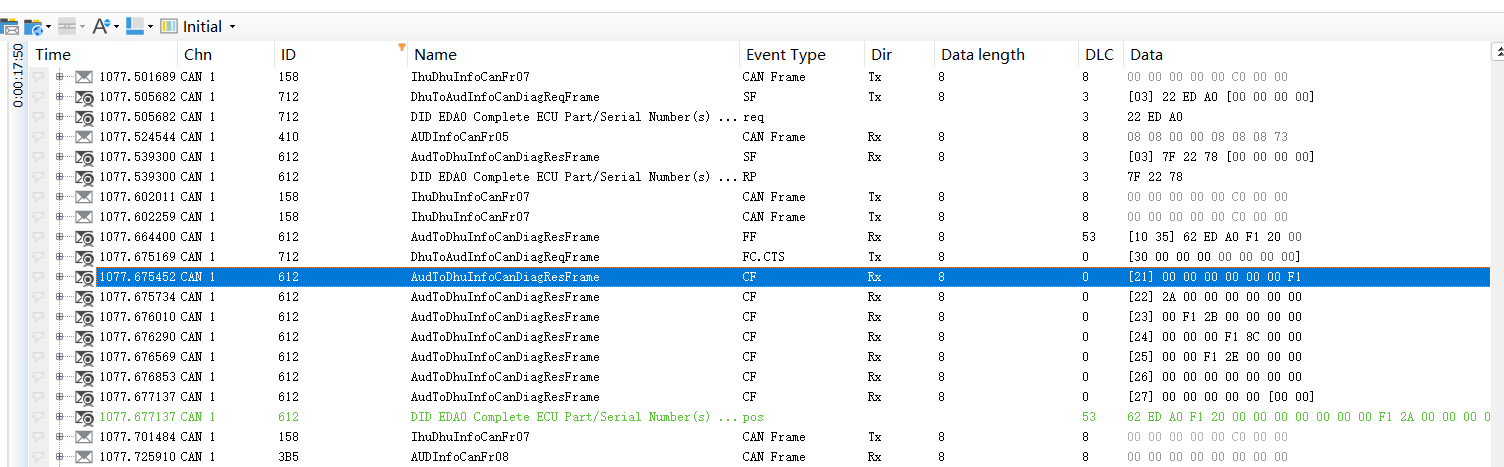
ISO 15765-2 多帧传输(分段传输)
CAN 协议本身最大只能传输 8 字节数据。当数据长度超过 8 字节时,就需要使用 ISO-TP(ISO 15765-2)协议,通过多个 CAN 帧来完成数据传输。
2.1.SF,FF,CF,FC.CTS,BS,STmin的解释
📦 关键帧类型(Event Type)解释:
| Event Type |
|---|
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 8235
8235

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









