



✅作者简介:热爱数据处理、建模、算法设计的Matlab仿真开发者。
🍎更多Matlab代码及仿真咨询内容点击 🔗:Matlab科研工作室
🍊个人信条:格物致知。
🔥 内容介绍
多智能体系统(Multi-Agent System, MAS)因其在机器人集群、传感器网络、社会经济建模等领域的广泛应用而备受关注。其中,一致性问题作为多智能体系统研究的核心内容之一,旨在设计合适的控制策略,使系统中所有智能体最终达到状态一致,例如位置、速度或姿态的一致。本文将深入探讨基于脉冲控制的多智能体一致性问题,并结合Matlab仿真源码进行分析与拓展,阐明其原理、算法实现以及潜在的改进方向。
一、脉冲控制与多智能体一致性
传统的连续时间控制方法需要持续的控制输入,而脉冲控制(Impulsive Control)则仅在离散时间点施加控制作用,这在实际应用中具有诸多优势:首先,脉冲控制降低了控制器的计算负担和能量消耗,适用于资源受限的智能体;其次,脉冲控制能够更有效地处理系统的突变和扰动;最后,脉冲控制可以模拟一些实际系统的特性,例如生物系统的脉冲式神经元活动。
将脉冲控制应用于多智能体一致性问题,其核心在于设计合理的脉冲控制律,使其能够在离散时间点有效地引导智能体状态向一致状态收敛。常见的脉冲控制策略包括基于事件触发机制的脉冲控制和基于周期性采样的脉冲控制。事件触发机制根据智能体状态的偏差触发控制脉冲,具有更高的效率;而周期性采样则在固定的时间间隔施加控制脉冲,实现相对简单的控制策略。
二、Matlab仿真源码解读与分析
假设一个由N个智能体组成的多智能体系统,其动力学模型可以描述为:
ẋᵢ = f(xᵢ, uᵢ, t), i = 1, 2, ..., N
其中,xᵢ表示第i个智能体的状态向量,uᵢ表示控制输入,f(·)表示系统动力学函数。在脉冲控制框架下,控制输入uᵢ仅在离散时间点tₖ施加作用,即:
uᵢ(t) = { 0, t ≠ tₖ
g(xᵢ(tₖ)), t = tₖ
其中,g(·)表示脉冲控制律,其设计至关重要。
一个典型的Matlab仿真源码可能包含以下步骤:
-
系统参数初始化: 设置智能体数量N,系统参数,初始状态,脉冲控制参数(例如采样周期或事件触发阈值),以及仿真时间。
-
系统动力学模型构建: 根据具体的应用场景,编写相应的系统动力学函数f(·)。例如,对于一阶积分器模型,f(xᵢ, uᵢ, t) = uᵢ。
-
脉冲控制律设计: 设计合适的脉冲控制律g(·)。这通常基于一致性协议,例如平均一致性协议或领导者跟随一致性协议。一个简单的平均一致性协议可以表示为:
g(xᵢ(tₖ)) = ∑ⱼ(xⱼ(tₖ) - xᵢ(tₖ))
其中,求和是对所有智能体进行的。
-
仿真过程: 利用Matlab的数值积分函数(例如ode45)模拟系统的动态演化。在每个采样时刻或事件触发时刻,根据设计的脉冲控制律更新智能体状态。
-
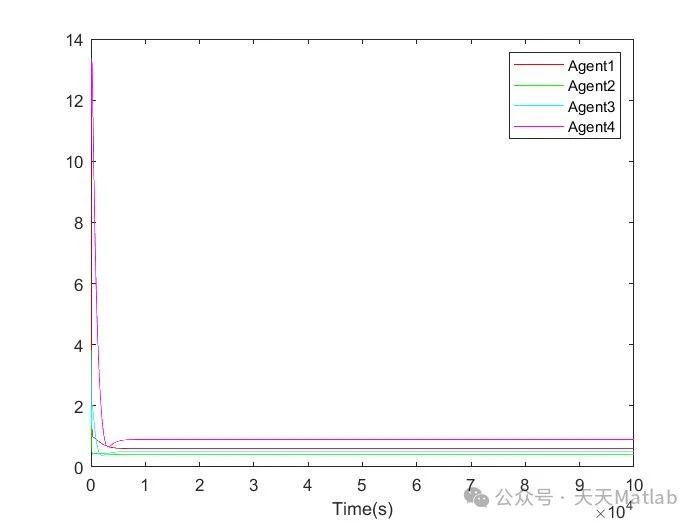
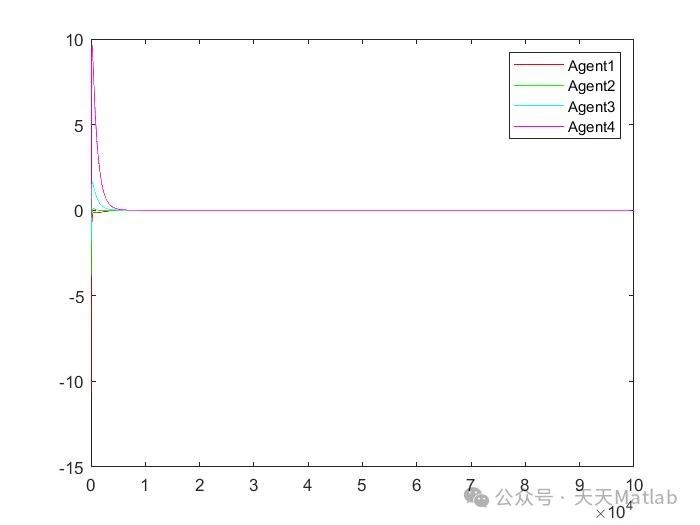
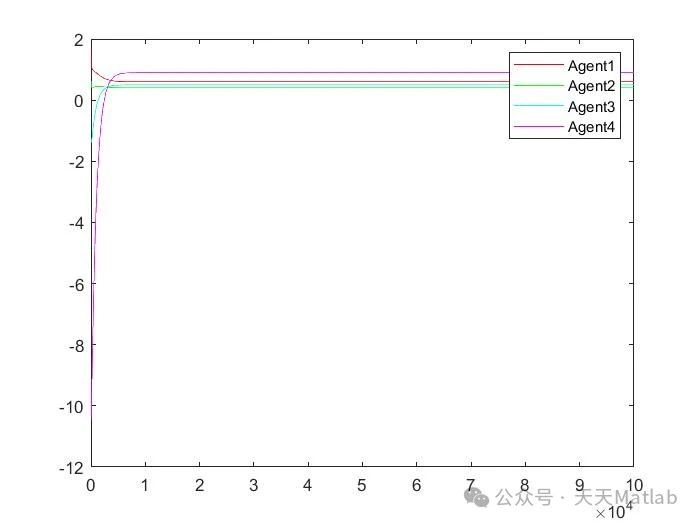
结果可视化: 绘制智能体状态随时间的变化曲线,以验证一致性算法的有效性。
三、源码拓展与改进
现有的Matlab仿真源码可以进行诸多拓展和改进,以适应更复杂的场景和需求:
-
考虑噪声和扰动: 在实际应用中,系统不可避免地会受到噪声和扰动的影响。可以将噪声项添加到系统动力学模型中,以评估脉冲控制算法的鲁棒性。
-
引入非线性动力学: 将线性动力学模型拓展到非线性动力学模型,以研究脉冲控制在更复杂系统中的有效性。
-
研究不同脉冲控制策略: 比较基于事件触发机制和周期性采样的脉冲控制策略的优劣,选择最适合特定应用场景的策略。
-
优化脉冲控制律: 采用优化算法,例如遗传算法或粒子群算法,设计性能更优的脉冲控制律,提高一致性收敛速度和精度。
-
考虑通信拓扑: 将通信拓扑引入模型中,研究通信拓扑结构对一致性收敛的影响。不同的通信拓扑结构会导致不同的信息传递模式,进而影响一致性算法的性能。
四、结论
本文详细探讨了基于脉冲控制的多智能体一致性问题,并结合Matlab仿真源码进行了深入分析。通过对源码的解读和拓展,我们能够更深刻地理解脉冲控制在多智能体系统中的应用,并为进一步的研究和开发提供参考。未来的研究可以关注更复杂的多智能体系统模型、更鲁棒的脉冲控制策略以及更有效的优化算法,以推动多智能体一致性理论和应用的进一步发展。 随着智能体数量的增加以及系统复杂度的提升,对算法效率和鲁棒性的要求也越来越高,这将是未来研究的重点方向。
⛳️ 运行结果
🔗 参考文献
[1] 李东华,江驹,姜长生.多智能体强化学习飞行路径规划算法[J].电光与控制, 2009, 16(10):5.DOI:10.3969/j.issn.1671-637X.2009.10.003.


















 443
443

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











