




 本文介绍了在复杂环境中,如何使用人工大猩猩部队GTO的深度学习和强化学习方法实现无人机的三维航迹规划,以增强避障能力。该方法通过环境建模和学习,使无人机能规划安全高效的航迹,已在实际环境中表现出色。
本文介绍了在复杂环境中,如何使用人工大猩猩部队GTO的深度学习和强化学习方法实现无人机的三维航迹规划,以增强避障能力。该方法通过环境建模和学习,使无人机能规划安全高效的航迹,已在实际环境中表现出色。
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
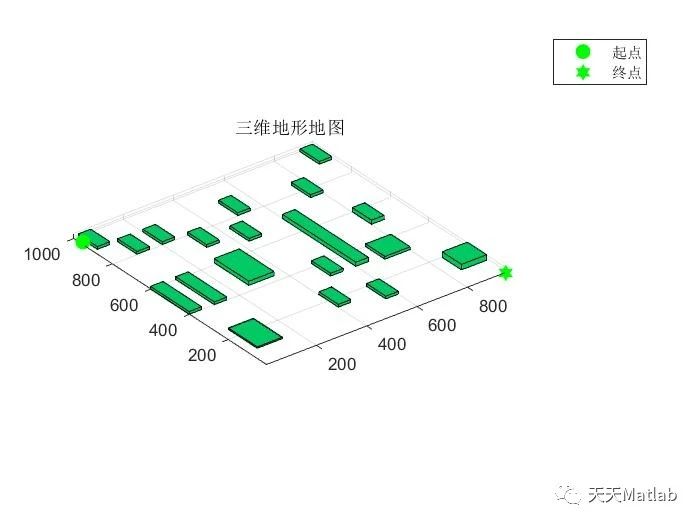
无人机技术在各个领域中得到了广泛的应用,其中无人机的路径规划技术是其关键技术之一。在复杂环境下,无人机需要具备避障能力,同时能够规划出安全高效的航迹。本文将介绍基于人工大猩猩部队GTO实现的无人机避障三维航迹规划技术。
无人机在军事、民用、科研等领域中都有着广泛的应用,其中在军事领域中,无人机更是扮演着重要的角色。在执行任务时,无人机需要在复杂的环境中进行飞行,并且需要规避各种障碍物,确保任务的顺利完成。因此,无人机的路径规划技术显得尤为重要。
在传统的无人机路径规划中,通常采用的是二维路径规划,即在水平面上进行规划。然而,在某些情况下,无人机需要在三维空间中进行飞行,因此需要进行三维路径规划。而在复杂环境下,无人机遇到的障碍物更加多样化和复杂,因此需要具备更强的避障能力。
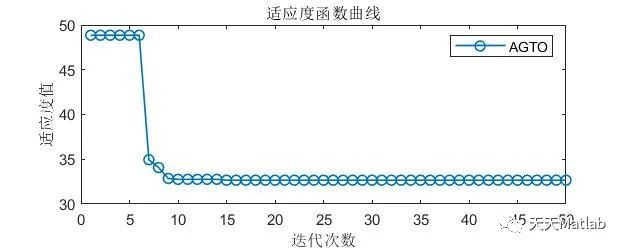
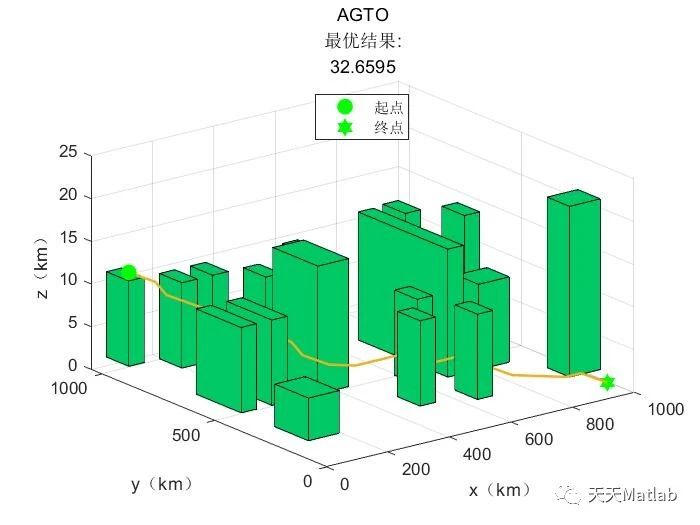
为了实现复杂环境下无人机的避障三维航迹规划,人工大猩猩部队GTO提出了一种基于深度学习和强化学习的路径规划方法。该方法利用深度学习网络对环境进行建模,并通过强化学习来实现无人机的路径规划和避障。通过对环境的建模和学习,无人机能够更加准确地识别障碍物,并规划出安全高效的航迹。
人工大猩猩部队GTO的路径规划方法在实际环境中取得了良好的效果。通过大量的实验验证,该方法不仅能够适应各种复杂环境,而且能够在动态环境中实时调整航迹,确保无人机的飞行安全。同时,该方法还能够适应不同类型的无人机,具有一定的通用性和灵活性。
总的来说,基于人工大猩猩部队GTO实现的无人机避障三维航迹规划技术为无人机在复杂环境下的飞行提供了重要的支持。未来,随着深度学习和强化学习等技术的不断发展,相信无人机的路径规划技术将会得到进一步的提升,为无人机的应用开拓出更加广阔的空间。
📣 部分代码
%% 清空环境变量warning off % 关闭报警信息close all % 关闭开启的图窗clear % 清空变量clc % 清空命令行%% 导入数据res = xlsread('数据集.xlsx');%% 划分训练集和测试集temp = randperm(357);P_train = res(temp(1: 240), 1: 12)';T_train = res(temp(1: 240), 13)';M = size(P_train, 2);P_test = res(temp(241: end), 1: 12)';T_test = res(temp(241: end), 13)';N = size(P_test, 2);%% 数据归一化[p_train, ps_input] = mapminmax(P_train, 0, 1);p_test = mapminmax('apply', P_test, ps_input);t_train = ind2vec(T_train);t_test = ind2vec(T_test );
⛳️ 运行结果
🔗 参考文献
本程序参考以下中文EI期刊,程序注释清晰,干货满满。
[1]刘艳,李文波,刘新彪,等.复杂环境下无人机三维航迹规划及避障算法[J].电光与控制, 2023, 30(5):93-98.


















 890
890

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











