




 文章介绍了基于鸡群优化的机器人路径规划算法,对比传统方法,它具有高效、适应复杂环境和鲁棒性等优点,已在无人机和自动驾驶等领域展现效果。文中详细阐述了算法原理及其实现,并讨论了未来挑战和应用前景。
文章介绍了基于鸡群优化的机器人路径规划算法,对比传统方法,它具有高效、适应复杂环境和鲁棒性等优点,已在无人机和自动驾驶等领域展现效果。文中详细阐述了算法原理及其实现,并讨论了未来挑战和应用前景。
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
在现代科技的推动下,机器人技术正以惊人的速度发展。机器人的应用范围越来越广泛,从工业生产到医疗保健,从军事作战到日常生活,无所不在。然而,要使机器人能够高效地完成任务,路径规划是一个至关重要的方面。本文将介绍一种基于鸡群优化的机器人路径规划算法,该算法在解决路径规划问题上具有显著的优势。
在机器人路径规划中,目标是找到一条最优路径,使机器人能够在给定的环境中以最短的时间或最小的代价到达目的地。然而,由于现实环境的复杂性和不确定性,路径规划问题变得非常困难。传统的路径规划算法,如A*算法和Dijkstra算法,虽然能够找到最短路径,但在处理大规模问题时效率较低。
为了解决这一问题,研究人员开始寻找新的路径规划算法。鸡群优化算法是一种基于自然界中鸡群行为的启发式优化算法,它模拟了鸡群在寻找食物时的行为。这种算法通过模拟鸡群的搜索过程,能够在搜索空间中找到最优解。
基于鸡群优化的机器人路径规划算法的核心思想是将机器人看作鸡群中的一只鸡,机器人的起始点和目标点分别对应鸡群中的鸡群位置和食物位置。算法首先随机生成一群候选路径,然后通过模拟鸡群的搜索行为来不断优化路径。在搜索过程中,每只鸡根据自身位置和周围鸡的信息来调整自己的位置,以找到更好的路径。通过多次迭代,算法能够逐步收敛到最优解。
与传统的路径规划算法相比,基于鸡群优化的算法具有以下优势:
-
高效性:鸡群优化算法能够在大规模问题上快速找到最优解,大大提高了路径规划的效率。
-
适应性:该算法能够自适应环境的变化,对于复杂和不确定的环境具有较强的适应性。
-
鲁棒性:基于鸡群优化的算法能够通过多次迭代来找到最优解,对于初始路径的选择不敏感,具有较好的鲁棒性。
-
可扩展性:该算法可以与其他优化算法结合使用,如遗传算法和模拟退火算法,以进一步提高路径规划的质量。
基于鸡群优化的机器人路径规划算法在实际应用中已经取得了显著的成果。例如,在无人机领域,该算法能够帮助无人机快速规划飞行路径,提高飞行效率和安全性。在自动驾驶汽车领域,该算法能够帮助车辆选择最优路径,减少交通拥堵和能源消耗。
然而,基于鸡群优化的机器人路径规划算法仍然存在一些挑战。例如,算法的参数选择和收敛性分析仍然是一个难题,需要进一步的研究和改进。此外,算法在处理动态环境和多机器人协同任务时的性能也有待提高。
综上所述,基于鸡群优化的机器人路径规划算法是一种有效的路径规划方法,具有高效性、适应性、鲁棒性和可扩展性等优势。随着对该算法的研究和改进,相信它将在未来的机器人应用中发挥更加重要的作用,为机器人的智能化发展做出贡献。
室内环境栅格法建模步骤
1.栅格粒大小的选取
栅格的大小是个关键因素,栅格选的小,环境分辨率较大,环境信息存储量大,决策速度慢。
栅格选的大,环境分辨率较小,环境信息存储量小,决策速度快,但在密集障碍物环境中发现路径的能力较弱。
2.障碍物栅格确定
当机器人新进入一个环境时,它是不知道室内障碍物信息的,这就需要机器人能够遍历整个环境,检测障碍物的位置,并根据障碍物位置找到对应栅格地图中的序号值,并对相应的栅格值进行修改。自由栅格为不包含障碍物的栅格赋值为0,障碍物栅格为包含障碍物的栅格赋值为1.
3.未知环境的栅格地图的建立
通常把终点设置为一个不能到达的点,比如(-1,-1),同时机器人在寻路过程中遵循“下右上左”的原则,即机器人先向下行走,当机器人前方遇到障碍物时,机器人转向右走,遵循这样的规则,机器人最终可以搜索出所有的可行路径,并且机器人最终将返回起始点。
备注:在栅格地图上,有这么一条原则,障碍物的大小永远等于n个栅格的大小,不会出现半个栅格这样的情况。
目标函数设定
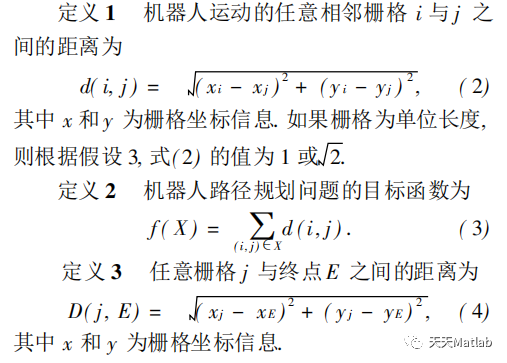
⛄ 部分代码
function drawPath(path,G,flag)%%%%xGrid=size(G,2);drawShanGe(G,flag)hold onset(gca,'XtickLabel','')set(gca,'YtickLabel','')L=size(path,1);Sx=path(1,1)-0.5;Sy=path(1,2)-0.5;plot(Sx,Sy,'ro','MarkerSize',5,'LineWidth',5); % 起点for i=1:L-1plot([path(i,2) path(i+1,2)]-0.5,[path(i,1) path(i+1,1)]-0.5,'k-','LineWidth',1.5,'markersize',10)hold onendEx=path(end,1)-0.5;Ey=path(end,2)-0.5;plot(Ex,Ey,'gs','MarkerSize',5,'LineWidth',5); % 终点
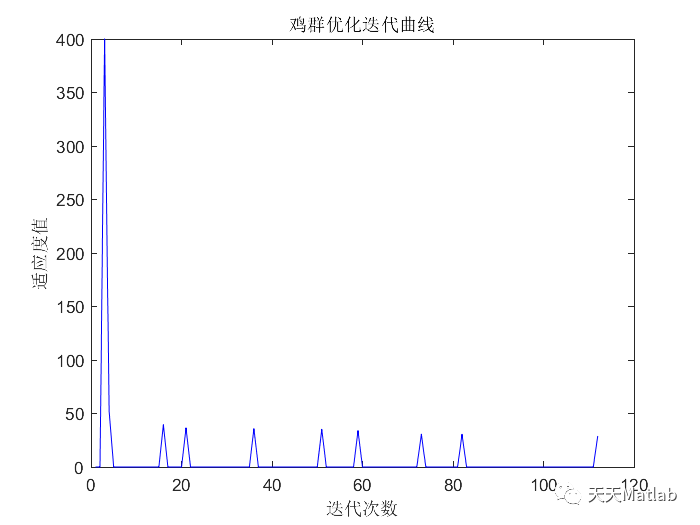
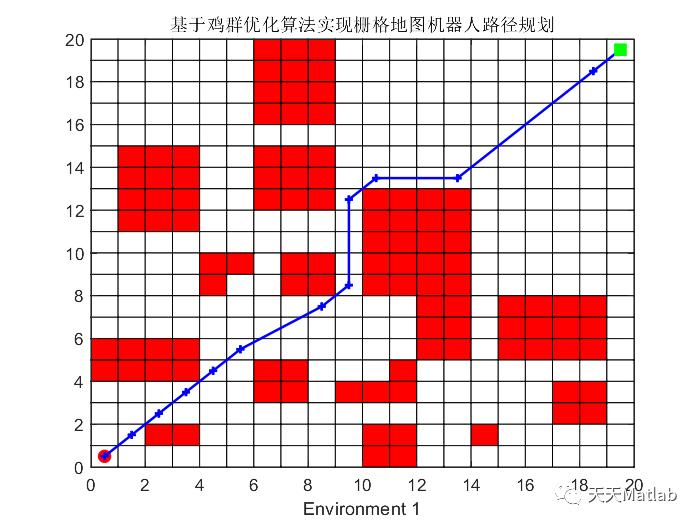
⛄ 运行结果
⛄ 参考文献
[1] 张毅,刘杰.一种基于优化混合蚁群算法的机器人路径规划算法:CN201711121774.X[P].CN107917711A[2023-07-10].
[2] 吴宪祥,郭宝龙,王娟.基于粒子群三次样条优化的移动机器人路径规划算法[J].机器人, 2009, 31(6):5.DOI:10.3321/j.issn:1002-0446.2009.06.013.
[3] 崔鼎,郝南海,郭阳宽.基于RRT*改进的路径规划算法[J].机床与液压, 2020(9).


















 414
414

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











