




 本文探讨了机动目标跟踪的问题,指出单模型跟踪滤波算法的局限性。文章重点介绍了交互多模型(IMM)算法,并通过仿真对比了IMM与单模型在机动目标跟踪上的性能,结果显示IMM能有效提升跟踪效果。此外,提供了MATLAB代码示例来展示算法的实现过程。
本文探讨了机动目标跟踪的问题,指出单模型跟踪滤波算法的局限性。文章重点介绍了交互多模型(IMM)算法,并通过仿真对比了IMM与单模型在机动目标跟踪上的性能,结果显示IMM能有效提升跟踪效果。此外,提供了MATLAB代码示例来展示算法的实现过程。
1 内容介绍
由于机动目标在运动过程中,运动状态会随时变化,而基于单模型跟踪滤波算法,难以适应机动目标随时改变的运动状态,因此对机动目标跟踪常采用多模型自适应跟踪算法.主要对多模型自适应跟踪算法中的交互多模型(IMM)方法进行了阐述,并对基于单模型和IMM机动目标跟踪进行仿真了比较分析,结果表明基于IMM机动目标跟踪滤波方法能够对机动目标实现很好的全程跟踪.
2 部分代码
%************交互多模算法*****************
%IMM算法 clear;clc
%function IMM(N)
N=10;
T=2;
sigma=100; %驱动噪声标准差
end
%计算滤波误差
for k=1:K
ex_(k)=ex1(k)/N;
ex(k)=sqrt(ex2(k)/N-ex_(k)^2);
ey_(k)=ey1(k)/N; %
ey(k)=sqrt(ey2(k)/N-ey_(k)^2);
xx(k)=xx(k)/N;
yy(k)=yy(k)/N;
end
%绘出图形
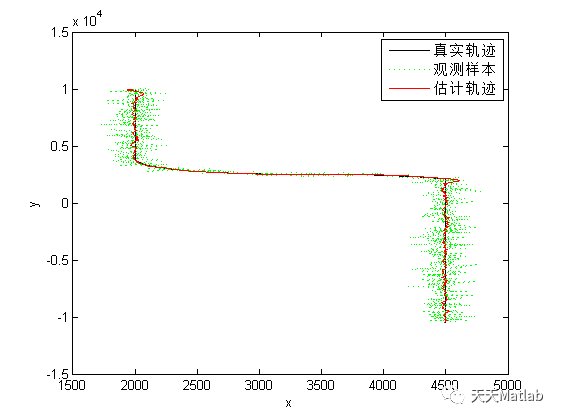
figure(1);
plot(x,y,'k-',zx,zy,'g:',xx,yy,'r-');
xlabel('x');ylabel('y');
legend('真实轨迹','观测样本','估计轨迹');
figure(2);
plot(ex_);
legend('X 方向误差均值');
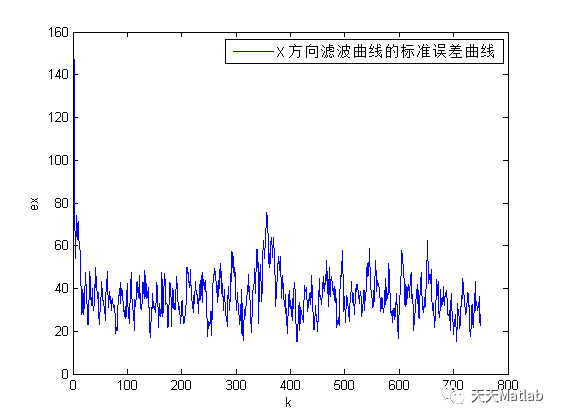
figure(3);
plot(ex);
ylabel('ex');xlabel('k');
legend('X 方向滤波曲线的标准误差曲线');
3 运行结果
4 参考文献
[1]李越强. 基于IMM的机动目标卡尔曼跟踪滤波算法[J]. 舰船电子对抗, 2021, 44(6):6.
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机、雷达通信、无线传感器等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。


















 329
329

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











