




DeepVisionary 每日深度学习前沿科技推送&顶会论文分享,与你一起了解前沿深度学习信息!
引言
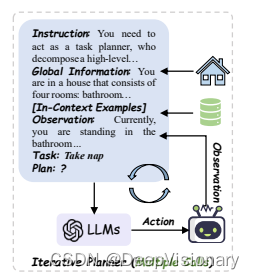
任务规划在机器人技术中扮演着至关重要的角色。它涉及到为机器人设计一系列中级动作(技能),使其能够完成复杂的高级任务。这一过程不仅需要考虑机器人的能力,还需考虑周围环境以及可能存在的各种约束和不确定性。近年来,利用大型语言模型(LLMs)直接生成动作成为了任务规划领域的新趋势。这种方法因其卓越的性能和用户友好性而受到青睐。然而,传统的基于LLM的任务规划方法存在诸多效率问题,如高代价的令牌消耗和冗余的错误修正,这些问题限制了其在大规模测试和应用中的可扩展性。
论文概览
- 标题:TREE-PLANNER: Planning with Large Language Models for Efficient Close-Loop Task
- 作者:Mengkang Hu, Yao Mu, Xinmiao Yu, Mingyu Ding, Shiguang Wu, Wenqi Shao, Qiguang Chen, Bin Wang, Yu Qiao
- 机构:
- The University of Hong Kong
- Noah’s Ark Laboratory
- Harbin Institute of Technology
- Shanghai AI Laboratory
- 链接:https://arxiv.org/pdf/2310.08582.pdf
TREE-PLANNER方法介绍
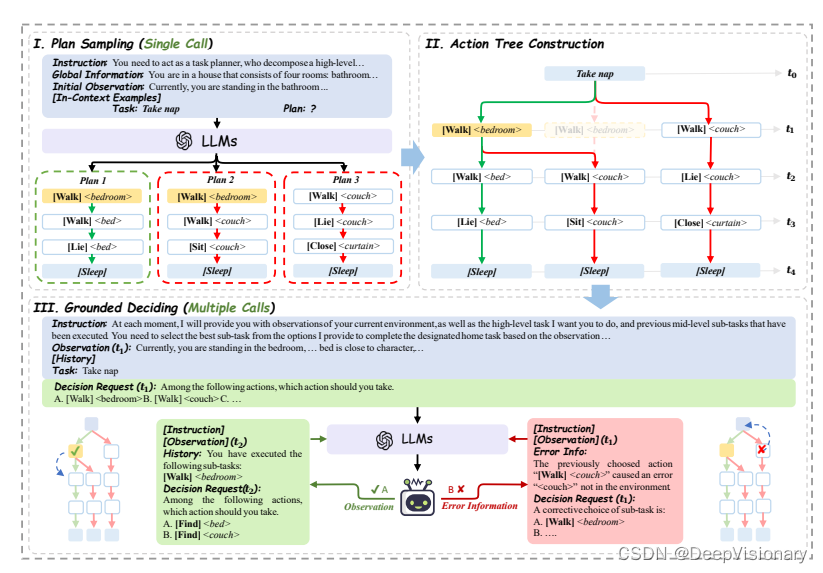
TREE-PLANNER是一种新型的任务规划方法,它通过将任务规划过程分解为三个阶段来提高效率和减少错误:计划采样、动作树构建和基于环境的决策。这种方法首先利用大型语言模型(LLM)来采样可能的任务计划,然后将这些计划聚合成一个动作树,最后在执行过程中根据实时环境信息对动作树进行决策。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 921
921

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









