




 本文详细介绍了如何使用最小二乘法在三维空间中拟合直线,通过向量表示和数学推导,得出最优直线方程的参数。并通过MATLAB代码展示了具体实现过程,包括直线经过的点计算和单位方向向量的求解。
本文详细介绍了如何使用最小二乘法在三维空间中拟合直线,通过向量表示和数学推导,得出最优直线方程的参数。并通过MATLAB代码展示了具体实现过程,包括直线经过的点计算和单位方向向量的求解。
一、问题描述
给定一系列的三维空间点 ( x i , y i , z i ) , i = 1 , 2 , . . . , n (x_i,y_i,z_i),i=1,2,...,n (xi,yi,zi),i=1,2,...,n,拟合得到直线的方程。本文的直线拟合方法适用于任意维空间的直线拟合,不失一般性,这里以三维空间的直线拟合为例。本文的直线拟合方法的基本思想参考博文:最小二乘法三维(k维)直线拟合。
二、推导步骤
设直线的点向式方程为:
x − x 0 a = y − y 0 b = z − z 0 c = s (1) \frac{x-x_0}{a}=\frac{y-y_0}{b}=\frac{z-z_0}{c}=s \tag 1 ax−x0=by−y0=cz−z0=s(1)
由式(1),得到直线的参数方程为:
{ x = x 0 + a s y = y 0 + b s z = z 0 + c s (2) \left\{ \begin{array}{c} x=x_0+as \\ y=y_0+bs \\ \tag 2 z=z_0+cs\end{array}\right. ⎩
⎨
⎧x=x0+asy=y0+bsz=z0+cs(2)
式(2)写成向量形式为:
L = L 0 + v s (3) \bm{L}=\bm{L_0}+\bm{v}s \tag 3 L=L0+vs(3)
其中, L = [ x , y , z ] T \bm{L}=[x,y,z]^T L=[x,y,z]T, L 0 = [ x 0 , y 0 , z 0 ] T \bm{L_0}=[x_0,y_0,z_0]^T L0=[x0,y0,z0]T为直线上任意一点, v = [ a , b , c ] T \bm{v}=[a,b,c]^T v=[a,b,c]T为直线的单位方向向量。
如下图,红色点 L i ( x i , y i , z i ) L_i(x_i,y_i,z_i) Li(xi,yi,zi)为给定的一系列三维空间点,根据给定三维空间点,拟合直线方程(3),也就是计算 L 0 \bm{L_0} L0和 v \bm{v} v,使得在某种“距离”的度量下,达到最佳的直线拟合效果。
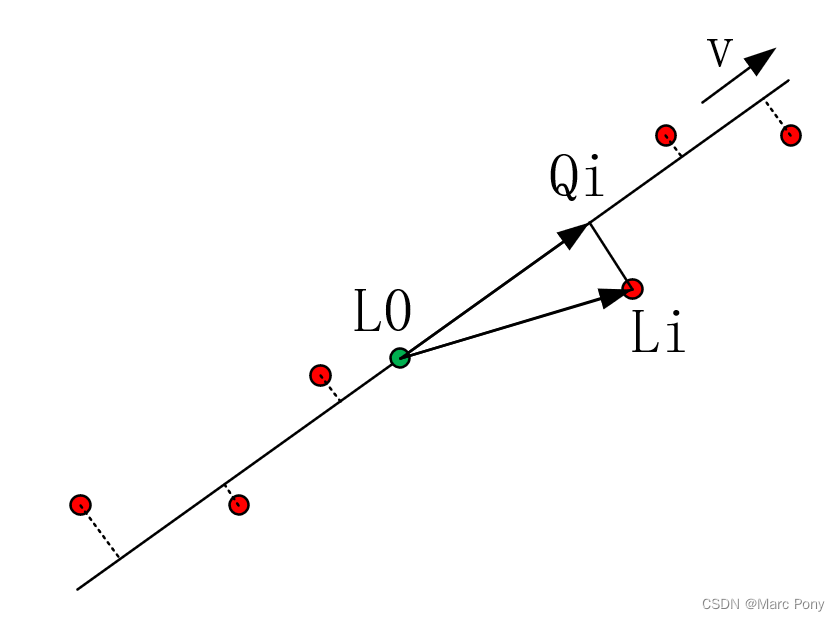
点 L i L_i Li到直线距离的平方为:
∣ ∣ Q i L i ∣ ∣ 2 = ∣ ∣ L 0 L i ∣ ∣ 2 − ∣ ∣ L 0 Q i ∣ ∣ 2 (4) ||\bm{Q_iL_i}||^2 = ||\bm{L_0L_i}||^2 -||\bm{L_0Q_i}||^2 \tag 4 ∣∣QiLi∣∣2=
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4882
4882

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









