






概述
在实际的3D成像中,由于投影仪和摄像机的位置必然不同,这会使得打在被测物上的条纹宽度与投影仪投出来的条纹宽度不同,从而导致测量深度与实际深度不符。(例如当我们要测量x轴所在与纸面垂直平面的深度时,测量出的结果是一个斜面)。
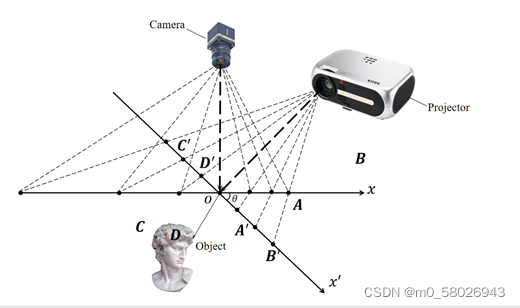
而最小相位图就是联系测量深度与实际深度的一个量,具体关系为![]() 。
。
由于这种绝对误差的存在会导致3D成像过程中的图片质量下降,所以在生成精密的3D图片过程中,解决这一误差至关重要。
由于![]() 并不是一个常量,而是一个随着位置不同而不同的量,为了求出
并不是一个常量,而是一个随着位置不同而不同的量,为了求出![]() ,我们可以令
,我们可以令![]() (或为一个常数A),这样可以得到
(或为一个常数A),这样可以得到![]() 。由于
。由于![]() 是一个理想的值,当条纹宽度、摄像机和投影仪的相对位置以及它们的焦距都确定时,
是一个理想的值,当条纹宽度、摄像机和投影仪的相对位置以及它们的焦距都确定时,![]() 是一个不变的量。所以
是一个不变的量。所以![]() 的求解需要根据标定的结果。
的求解需要根据标定的结果。
通过标定我们可以获得投影仪和摄像机三维转化为二维的转化矩阵![]() 和
和![]() 以及对应的图像失真系数
以及对应的图像失真系数![]() 。设:三维坐标:
。设:三维坐标:![]() ,对应二维坐标为
,对应二维坐标为![]()
空间三维坐标转化成像素二维坐标
通过针孔模型,我们可以获得计算关系:
![]()
![]()
![]()
得到三维转化为二维的关系:
通过推导针孔模型的公式,我们可以看出三维转化为二维容易,但是二维转化为三维则极其复杂。所以推导![]() 过程中只能使用三维转化为二维这一个关系。
过程中只能使用三维转化为二维这一个关系。
最小相位图 推导流程:
推导流程:
第一步就是构建一个三维的平面![]() ,此处以摄像机坐标系作为世界坐标系,通过摄像机的标定矩阵
,此处以摄像机坐标系作为世界坐标系,通过摄像机的标定矩阵![]() 与数据
与数据![]() 将这一平面转化为一个二维的量
将这一平面转化为一个二维的量![]() ,此时我们可以得到非常多X
,此时我们可以得到非常多X![]() 与
与![]() 一一对应的点。
一一对应的点。
结合摄像机的像素(例如像素为492×656),构建一个492×656的矩阵,矩阵的值为它们的坐标点![]() ,取
,取![]() 中与
中与![]() 最靠近的点(整数点),并记录下来,此时我们就得到了摄像机所有像素点
最靠近的点(整数点),并记录下来,此时我们就得到了摄像机所有像素点![]() 所对应的三维坐标中的点
所对应的三维坐标中的点![]() (实现二维转化到三维)。
(实现二维转化到三维)。
之后将得到的三维点矩阵![]() ,用投影仪的标定矩阵
,用投影仪的标定矩阵![]() 与数据
与数据![]() 计算,可以得到一个二维矩阵
计算,可以得到一个二维矩阵![]() 。我们就获得了摄像机像素点
。我们就获得了摄像机像素点![]() 与投影仪像素点
与投影仪像素点![]() 的一一对应。
的一一对应。
再在获得的![]() 上进行生成对应的条纹图(以四步相移为例),对这四张条纹图用四步相移求解相位并解包裹,就可以获得我们所要求的最小相位图
上进行生成对应的条纹图(以四步相移为例),对这四张条纹图用四步相移求解相位并解包裹,就可以获得我们所要求的最小相位图![]()
(由于有时间,我又写了一个解释,跟上面是一样的,没看懂的可以看一下)
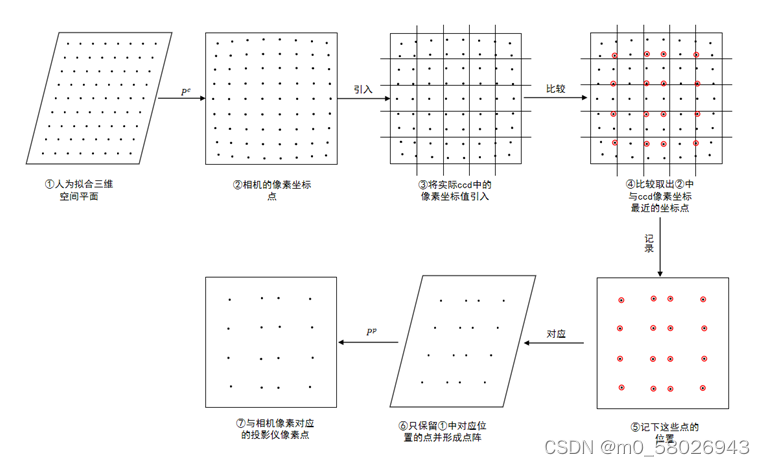
步骤1:构建一个精密度高三维平面①。
步骤2:通过相机矩阵![]() ,将这一三维平面转化为二维平面②
,将这一三维平面转化为二维平面②
步骤3:构建一个与所用CCD像素一致的二维平面![]() ,每个像素点的坐标都为整数,将这一二维平面
,每个像素点的坐标都为整数,将这一二维平面![]() 与②进行比较。
与②进行比较。
步骤4:将②中与![]() 最近的点保留下来④,并记录这些的位置⑤。
最近的点保留下来④,并记录这些的位置⑤。
步骤5:将⑤位置所对应的三维点保留下来,并用这些点构建一个三维平面⑥。
步骤6:对平面⑥,应用投影仪矩阵![]() ,从而求出了投影仪的二维平面⑦。从完成了⑦的像素点与CCD的像素点
,从而求出了投影仪的二维平面⑦。从完成了⑦的像素点与CCD的像素点![]() 的一一对应。
的一一对应。
步骤7:再利用⑦中获得的二维平面,生成条纹图
即:![]() ————————①
————————①
![]() 与所用投影仪条纹一致,与投影仪条纹宽度有关。
与所用投影仪条纹一致,与投影仪条纹宽度有关。![]() 与所用的多步相移有关,这里我们使用四步相移,所以
与所用的多步相移有关,这里我们使用四步相移,所以![]() =0、Π/2、Π、3Π/2,带入①分别得到
=0、Π/2、Π、3Π/2,带入①分别得到![]() 、
、![]() 、
、![]() 、
、![]() 。
。
所以利用四步相移的公式:![]() 求出相位值。
求出相位值。
利用枝切法解包裹后就可获得![]() 。
。
讨论:我们可以看出求解后![]() 的准确程度与构建的三维平面①的精密程度有关,若①平面上点之间距离越近,转化后,所被记录的②平面上的点与CCD的点就约接近,从而求出的
的准确程度与构建的三维平面①的精密程度有关,若①平面上点之间距离越近,转化后,所被记录的②平面上的点与CCD的点就约接近,从而求出的![]() 就越准确。
就越准确。
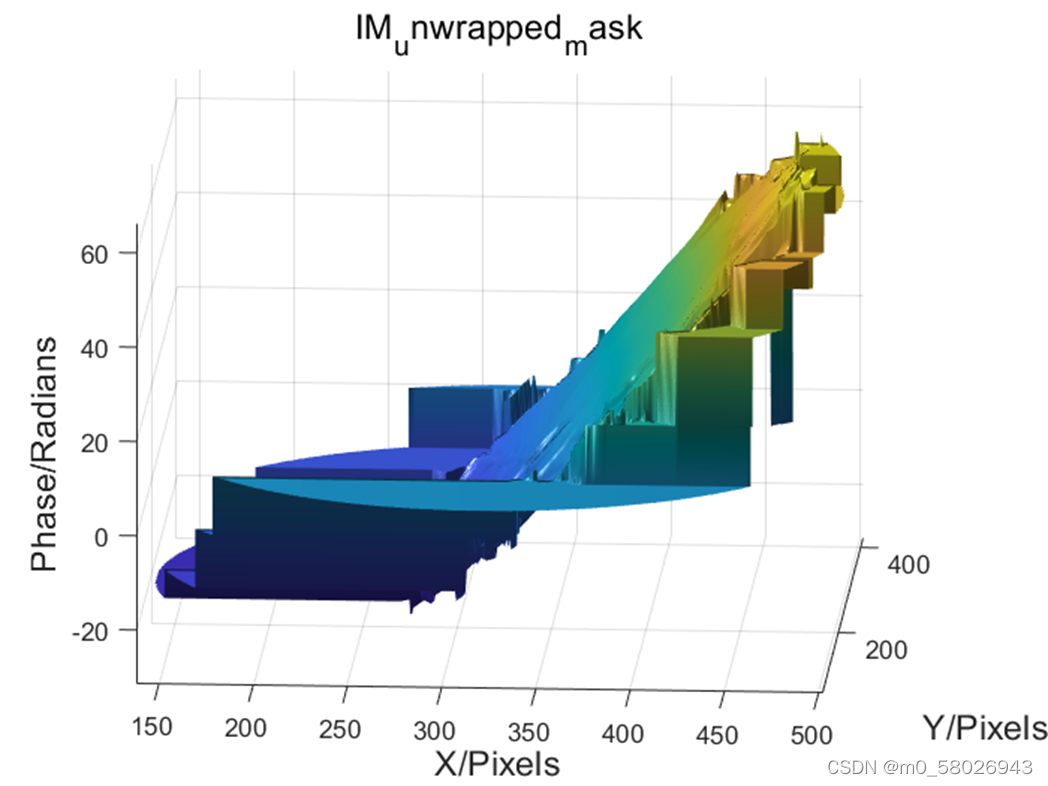
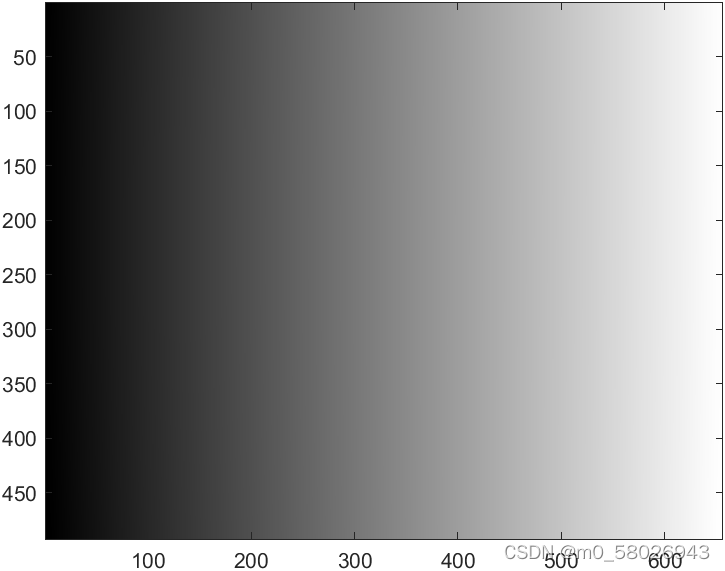
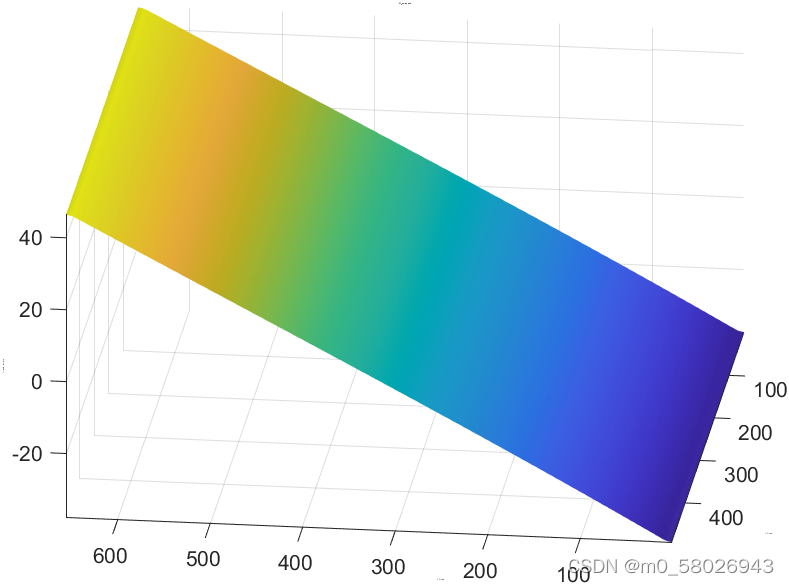
实验求得的最小相位图

















 1149
1149

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









