




题目描述
输入一棵二叉搜索树,将该二叉搜索树转换成一个排序的双向链表。要求不能创建任何新的结点,只能调整树中结点指针的指向。
递归思路:
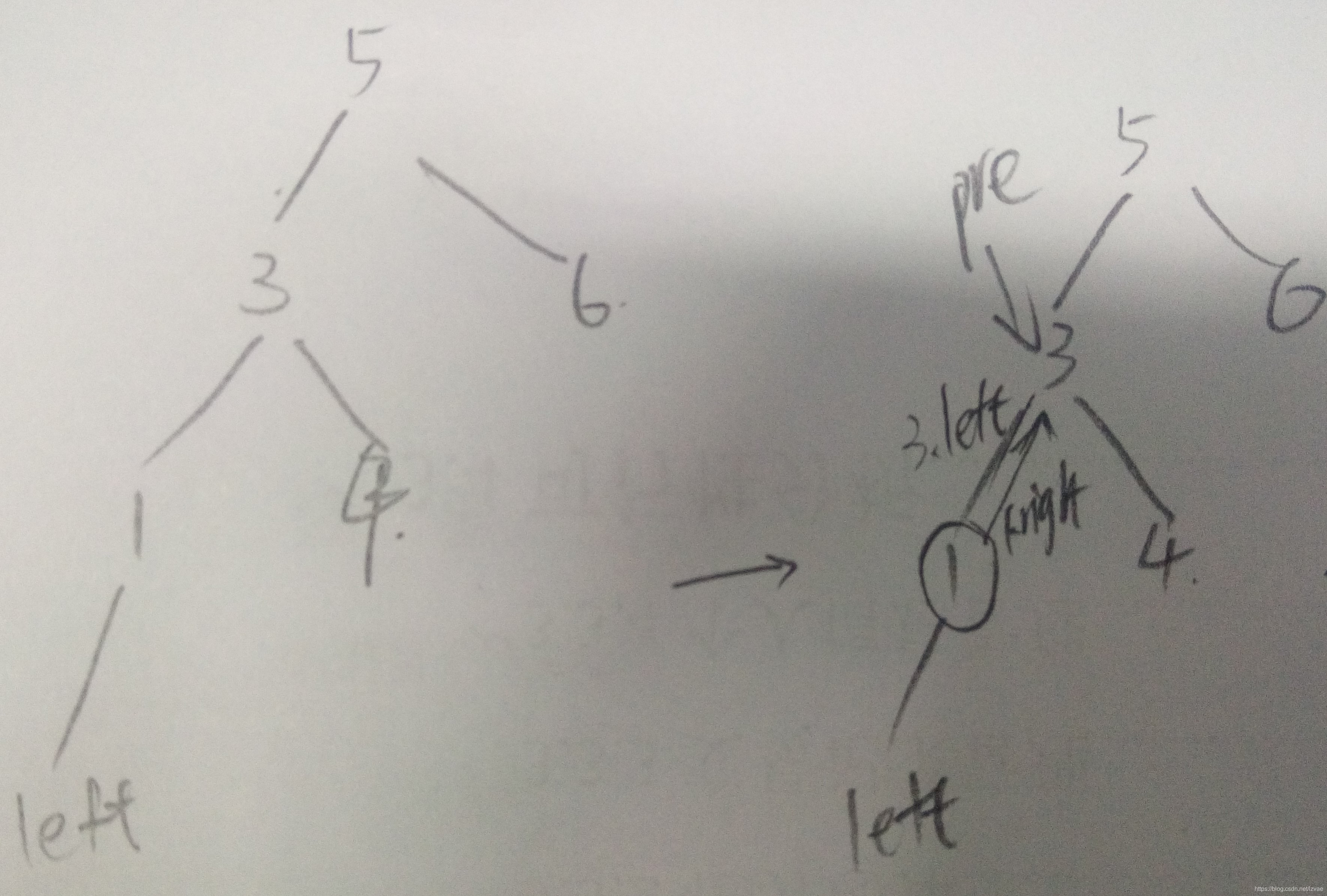
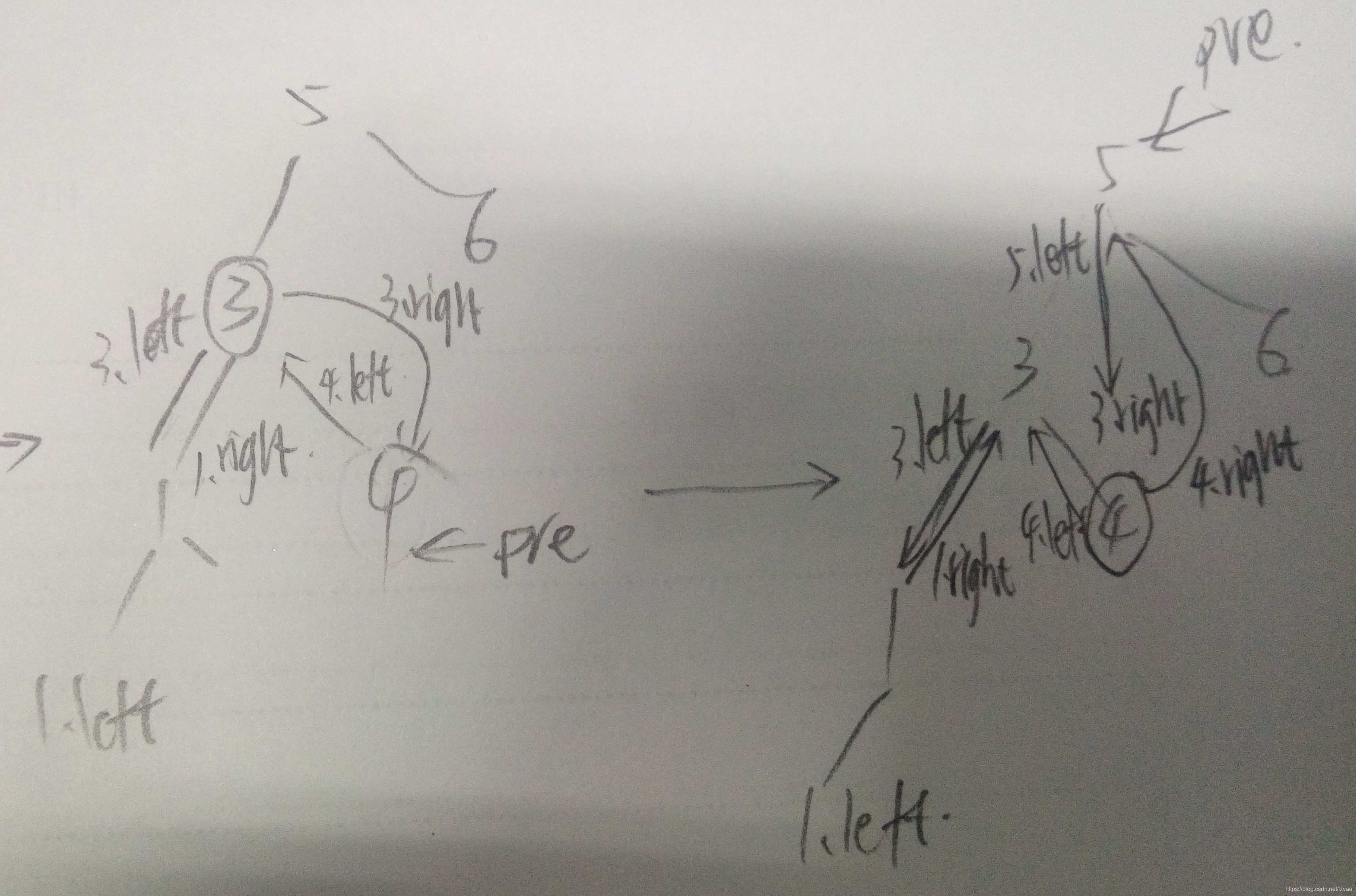
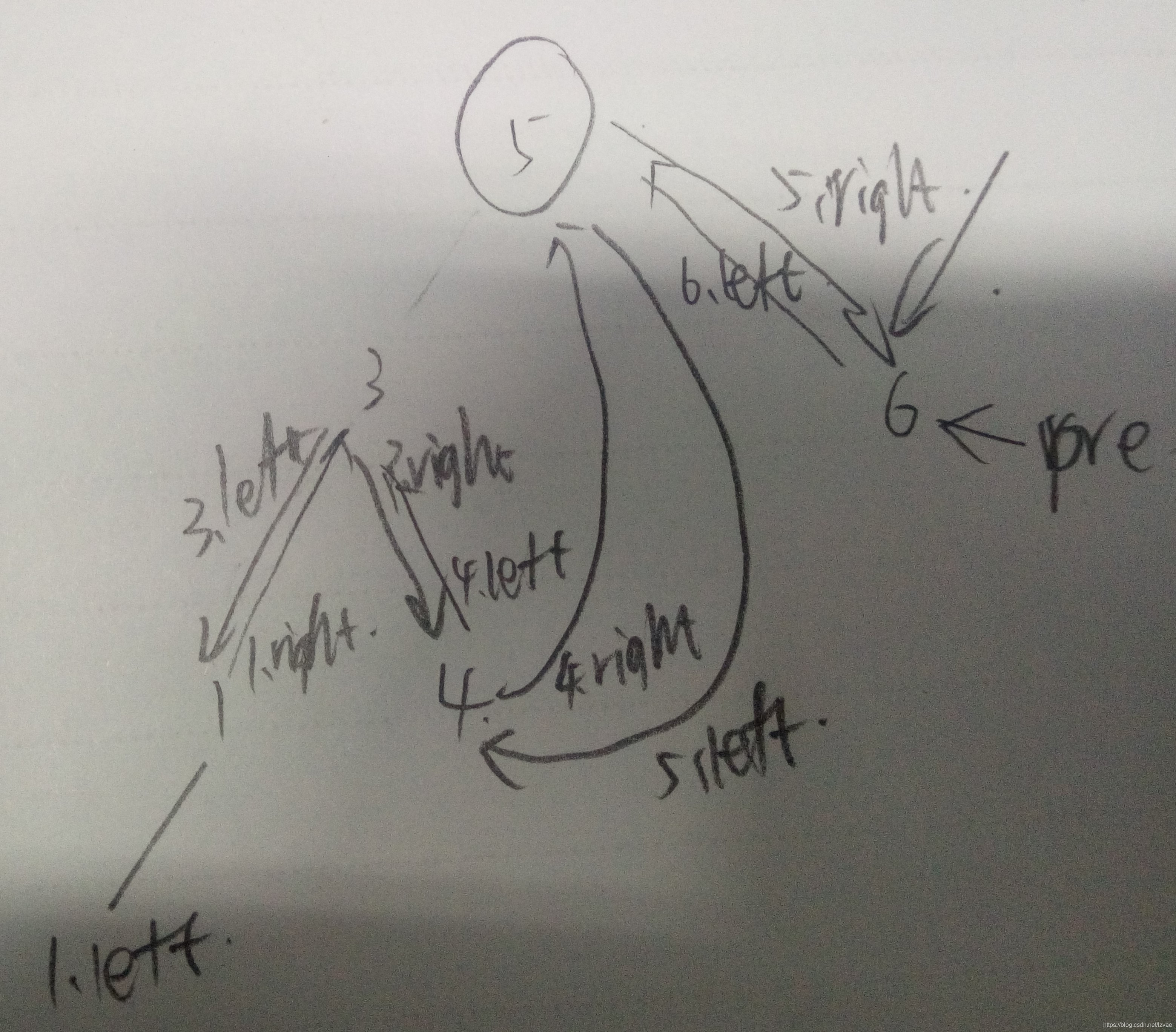
中序遍历,记录pre。左子树走到头的pre应该是null,所以初始pre=null,左子树的pre是原来的左孩子, 右子树的pre是它的父节点。
/*
struct TreeNode {
int val;
struct TreeNode *left;
struct TreeNode *right;
TreeNode(int x) :
val(x), left(NULL), right(NULL) {
}
};*/
class Solution {
public:
void BeList(TreeNode* root, TreeNode* &pre){
if(!root) return ;
BeList(root->left, pre);
root->left = pre;
if(pre) pre->right = root;
pre = root;
BeList(root->right, pre);
}
TreeNode* Convert(TreeNode* pRootOfTree)
{
if(!pRootOfTree)
return nullptr;
TreeNode* pre = nullptr;
TreeNode* res = pRootOfTree;
BeList(pRootOfTree, pre);
while(res->left)
res = res->left;
return res;
}
};
图解:

















 567
567

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









