




 本文介绍了感知机作为线性二分类器的基本原理,包括模型表示、感知机学习过程以及点到超平面距离的计算。通过梯度下降法最小化损失函数来确定超平面的参数w和b,进而实现分类。文章还讨论了随机梯度下降在实际应用中的作用,以优化参数更新。
本文介绍了感知机作为线性二分类器的基本原理,包括模型表示、感知机学习过程以及点到超平面距离的计算。通过梯度下降法最小化损失函数来确定超平面的参数w和b,进而实现分类。文章还讨论了随机梯度下降在实际应用中的作用,以优化参数更新。
感知机
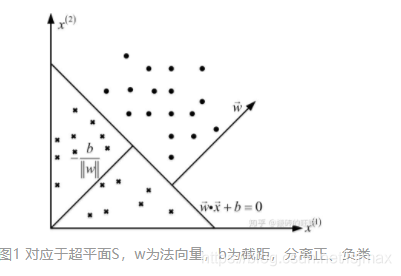
感知机时神经网络的雏形,是线性二分类器,输入实例的特征向量,输出1,-1进行实例的分类。感知机模型是寻找N维空间的超平面。(超平面是指将空间一分为二的平面,N维空间的超平面为N-1维,如二维平面的超平面是一条直线,三维空间的超平面是一个平面)。
感知机模型的表示:
f(x⃗)=sign(w⃗⋅x⃗+b)f(\vec{x})=sign(\vec{w} \cdot \vec{x}+b)f(x)=sign(w⋅x+b)
其中,w⃗\vec{w}w和b是模型的参数,需要学习的,w⃗\vec{w}w为该超平面w⃗⋅x⃗+b=0\vec{w} \cdot \vec{x}+b=0w⋅x+b=0的法向量。
感知机学习
感知机模型重要就是确定超平面,就是求出w⃗,b\vec{w},bw,b这两个参数。方法就是建立一个目标函数,就行迭代求优。该目标函数往往为损失函数(当前模型与实际真实模型的差距),通过梯度下降,最小化损失函数。
自然容易想到的是,统计训练数据分类分错的样本个数,但是他无法用函数表示,就是无法就行微分,不能用梯度下降。因此采用另一个方法,计算误分类的点到超平面的距离ddd,损失函数就是所有误分类点到超平面的距离的总和。
L(w⃗,b)=∑diL(\vec{w},b)=\sum d_iL(w,b)=∑di
点到超平面的距离计算
设样本点x0⃗\vec{x_0}x0,在超平面w⃗⋅x⃗+b=0\vec{w} \cdot \vec{x}+b=0w⋅x+b=0的投影(作垂线)为x1⃗\vec{x_1}x1,则所求的距离d就是向量x0x1⃗\vec{x_0x_1}x0x1的模长。显然w⃗\vec{w}w和x0x1⃗\vec{x_0x_1}x0x1平行,则有:
w⃗⋅x0x1⃗=∣w⃗∣∣x0x1⃗∣cos(0orπ)\vec{w}\cdot\vec{x_0x_1}=|\vec{w}| |\vec{x_0x_1}|cos(0 or π)w⋅
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5285
5285

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









