








设备连接
驱动板接入电脑后会虚拟为串口,点击“刷新”,选择对应的com,点击“连接设备”,软件左下角会提示“连接成功”。驱动板出厂默认ID为1,波特率保持默认即可。下图:

基本设置

- 设置ID:如需RS485或CAN组网,可以设置不同的ID号,设置范围1-127,
- 串口波特率:9600、38400、57600、115200、230400、460800、921600,
- CAN波特率:10k、20k、50k、100k、125k、250k、500k、800k、1M,
电机设置

- 电机类型:电机的相电阻小于2Ω的为“High Current”,大于2Ω的为 “Gimbal”,
- 极对数:电机磁极对数叫极对数,注意区分“极数”和“极对数”两个概念,
- 校准电流:电机校准时的电流,对于High Current电机,就是电流的采样值;对于Gimbal电机,会把校准电流等比例为占空比,比如电源电压12V,校准电流为3,那么校准时的pwm占空比固定为25%。实际操作中,根据经验设置校准电流,如果设置的太小,电机没劲,校准时转不动,校准容易出错;如果校准电流设置的太大,电机发热,可能损坏电机和板载MOS。
- 校准最大电压:电机校准时用于测量相电感,一般使用默认值2,对于电感比较大的电机,可以设置偏大一点,比如轮毂电机设置为5。
- 编码器类型:目前支持Hall/ABZ/AS5047P/MT6701/MA730/TLE5012B/MT6835,根据实际应用选择。
- 编码器cpr:SPI接口的磁编码器已经固定了cpr无需设置;ABZ信号的cpr根据实际设置;霍尔电机的cpr=极对数x6。
- 编码器带宽:一般使用默认值1000即可,霍尔电机cpr较低,需要设置小一点,比如轮毂电机设置为100,常用的2对极霍尔电机设置为50—60。
- 电机方向:设置反向,电机反转。
- 力矩常数:电机的力矩常数,用于力矩模式。如果不清楚电机参数,可使用默认值。
控制设置

-
控制模式:力矩模式、速度模式、位置梯形轨迹、位置平滑滤波、位置直通模式。
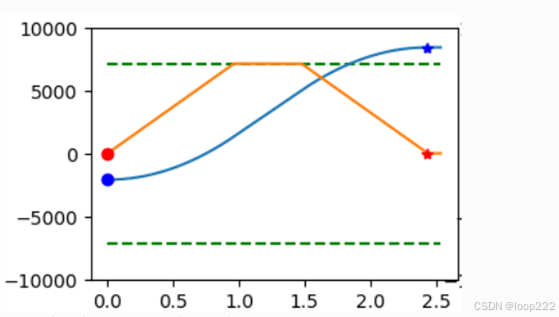
位置梯形轨迹:“梯形轨迹速度限制”限制了电机的最大速度,“梯形轨迹加速斜率”控制电机速度上升斜率,参数越大上升曲线越陡峭,“梯形轨迹减速斜率”控制电机速度下降斜率,参数越小下降曲线越平缓。实际应用中会把加速斜率设置大一点,减速斜率设置小一点,实现电机快速启动平稳停止的效果。如下图,
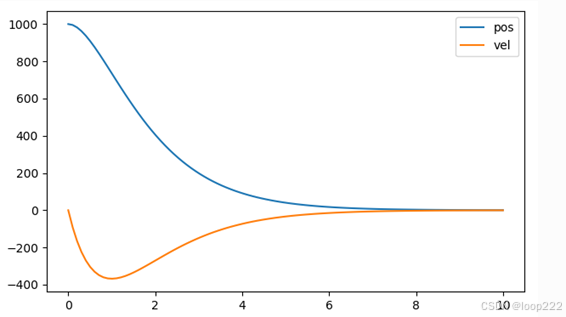
位置平滑模式:受“最大速度”、“滤波带宽”两个参数的约束,从下图曲线可以看出,电机快速启动,缓慢停止。实际应用中,停止过于缓慢,不如位置梯形轨迹的效果好。
-
最大电流:限制电机运行时的最大电流,对所有控制模式有效。
-
最大速度:限制电机运行时的最大速度,对所有控制模式有效。
-
滤波带宽:只对“位置平滑模式”有效,默认值为4,一般设置2-10之间。
-
电流爬升率:只对“力矩模式”有效,控制电机运行时电流增加和减小时的斜率。
-
速度爬升率:只对“速度模式”有效,控制电机运行时速度增加和减小时的斜率。
-
速度Kp、Ki:对“速度模式”和所有位置模式有效,PI参数是经验值,请根据实际应用设置。
-
位置Kp:对所有位置模式有效,P参数是经验值,一般设置10—50之间。
-
梯形轨迹速度限制:限制梯形轨迹的最大速度。
-
梯形轨迹加速斜率:限制梯形轨迹的上升斜率。
-
梯形轨迹减速斜率:限制梯形轨迹的下降斜率。
保护设置
欠压保护、过压保护、过流保护、驱动器温度保护、电机温度保护。
根据需要设置对应的保护,使能可以选择“可恢复”和“不可恢复”,“可恢复”的保护,恢复后电机失能,需要重新发送指令进入闭环状态。
保存并重启
点击【保存并重启】,驱动板保存当前参数并重启(参数生效),左下角提示“设置成功”。
注意,重启后,USB通信需先点击“断开连接“再”连接设备“,才能与驱动器再次通信。

读取参数
点击【读取参数】,从驱动器读取当前电机配置到上位机。

擦除参数并重启
点击【擦除参数并重启】,驱动器恢复为默认参数并重启。
注意,重启后,USB通信需先点击“断开连接“再”连接设备“,才能与驱动器再次通信。

设备重启
点击【设备重启】,驱动器重启。
注意,重启后,USB通信需先点击“断开连接“再”连接设备“,才能与驱动器再次通信。

店铺:图锐科技

















 9196
9196

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









