




目录
ODrive、VESC和SimpleFOC 教程链接汇总:请点击
一、USB虚拟串口
单片机的USB通信,一般都是以虚拟串口的方式实现,ODrive使用自定义的接口,所以才需要用zadig驱动。
本次移植,支持USB虚拟串口通信,本节介绍实现的方法。
1.1、硬件连接

驱动板 购买链接:某宝购买
可以用USB供电3.3V,或者用外部供电。
但不要同时两个供电,驱动板本身产生的3.3V和USB提供的3.3V可能会有电压差,导致电流烧坏元件。
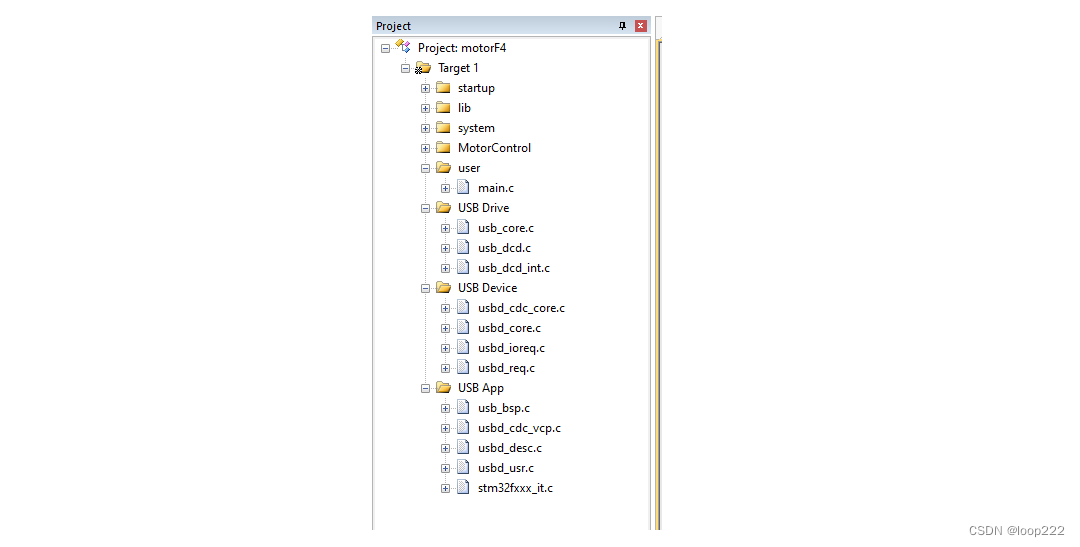
1.2、代码移植
利用STM32CubeMX生成USB转串口的代码,我没有实现,测试不行。
正点原子提供STM32F103C8T6的USB转串口例程,但是没有提供STM32F4的USB转串口例程,
所以我决定移植一个。
本次移植参考了正点原子,下图:


移植的前期工作就是按照这篇教程操作,然后再添加VCP的相关文件,
我本来是打算描述下移植的细节的,但是隔的时间太久了,已经记不清细节,
ODrive的GPIO3/4是USAR2,
USART2的配置在usbd_cdc_vcp.c文件中,并在USB初始化的时候被调用,
修改串口在 usbd_cdc_vcp.h文件中修改宏定义,并在usbd_cdc_vcp.c文件中修改串口中断函数定义
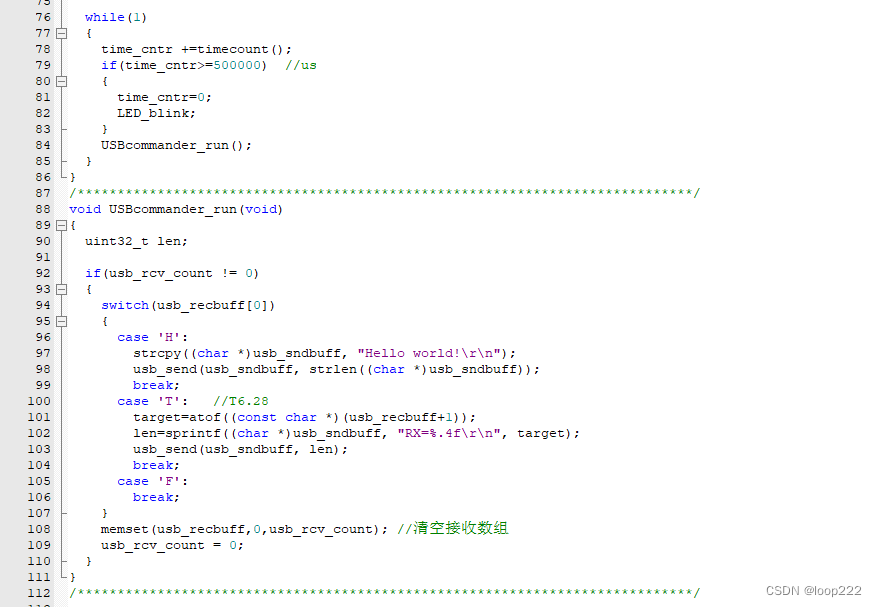
1.3、测试

USB收到的数据通过USART2发出,USART2收到的数据通过USB发出。
1.4、最终代码
以上测试证明了USB虚拟串口移植成功,但在实际应用中,只需要USB收发数据,不需要USART2,所以屏蔽掉相关配置。

二、快速正弦余弦运算
本节代码测试三种正弦余弦的运算方案,以体现不同方案的效率和精度,
三种方案分别是:
1、普通的浮点数正弦余弦运算,
2、DSP库优化后的正弦余弦运算,
3、ODrive提供的快速正弦余弦运算。
2.1、硬件连接
DSP做为软件算法,不需要外接设备,下图:

驱动板 购买链接:https://item.taobao.com/item.htm?ft=t&id=644329838237,图锐科技
2.2、代码移植
- 本节代码要添加DSP库,参考了正点原子的例程,

- 移植后的代码,通过USB虚拟串口通信,
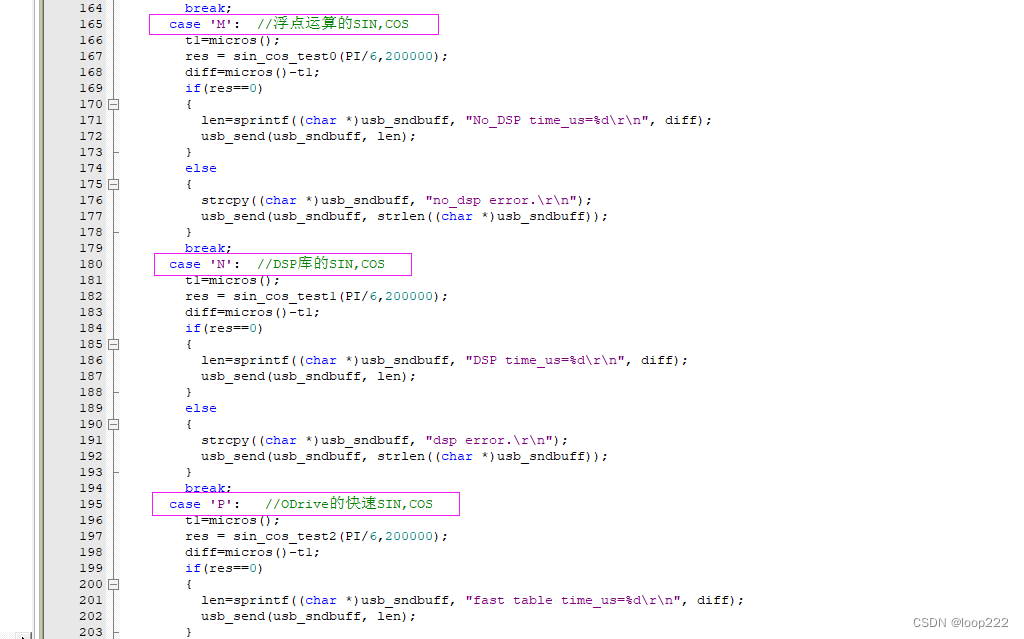
2.3、测试

普通的浮点运算, 运算时间大约303944 us,精度在0.000001f,
DSP库优化后的运算,运算时间大约261520 us,精度在0.000001f,
ODrive快速运算, 运算时间大约184065 us,精度在0.0001f,
2.4、结论
1、带不带DSP库,运算差别并没有想象的大,
2、ODrive快速运算精度差一点,但是速度完胜,
3、此次移植我本来是打算用DSP库的快速运算的,但对比后我觉得继续用ODrive的快速运算会更好,
4、稍后在mit驱动器移植的教程中,我们会继续对比不同的快速运算方案,结果非常出人意料。
三、软件中断
这个功能一般很少用,本人在稍后的移植中也没有使用,大家了解即可。
之所以要拿出来讲一下,是因为网上搜到的都没有说完整,浪费了我不少时间,所以我要讲一下给大家避坑。
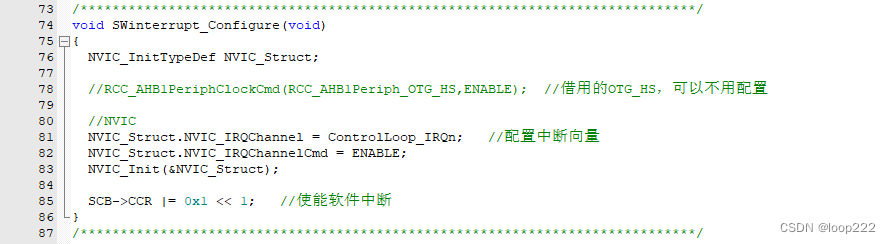
3.1、配置中断
初始化配置,除了要使能软件中断,还要配置借用的软件中断向量,下图:

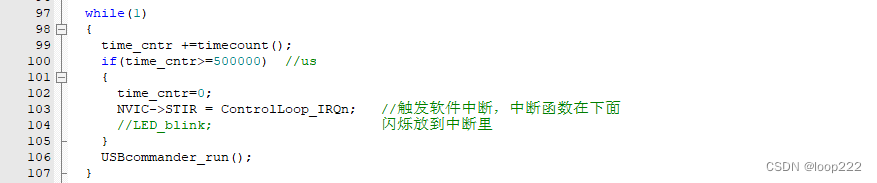
主循环中触发中断,在中断函数中LED闪烁,下图:
3.2、官方代码的使用方式
官方代码中是这样使用软件中断的,下图:

上面描述的意思,似乎进入软件中断后,就不再进入第二个更新中断了。
但是我实际的测试,从软件中断退出后仍然会执行第二个更新中断,并且我觉得在软件中断中等待第二次更新中断,很浪费时间,所以就没有使用这个方案。也可能是我没有掌握好这个功能。
驱动板购买链接:https://item.taobao.com/item.htm?ft=t&id=644329838237,图锐科技
电机 购买链接:https://item.taobao.com/item.htm?ft=t&id=643573104607,图锐科技
欢迎加入技术交流群:923734429 (入群申请写:优快云)
(完)

















 4058
4058

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









