






声明
本文是b站中科大电控的学习笔记,也可供大家参考学习
通信相关基础知识
CAN通信的分层
不同层分工不同,抽象层级不同
可以理解为:
1. 物理信号层 2.链路传输层 3.应用数据层
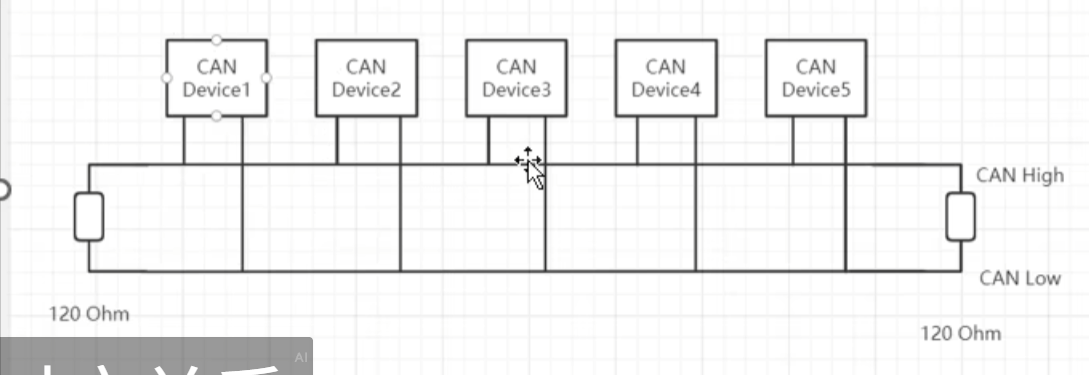
CAN通信的接线方法
一根CAN-H,一根CAN-L,通过120欧姆的电阻接入
传输方式
利用差分信号,减少外界噪音的干扰(看的是两条线之间的电压差)
编码1是两者电平相同,一般都是2.5
编码0是两者电平不同,一般是3.5和1.5
区分:比特率与波特率
比特率是传输的二进制码元数量
波特率是传输的有效码元的数量(与进制有关)
如果一秒传输1000个字符,每个字符对应一种唯一的电平信号,那么波特率就是1000symbol/s;由于一个十六进制字符要用四位二进制编码表示,那么它的比特率就是4000bit/s
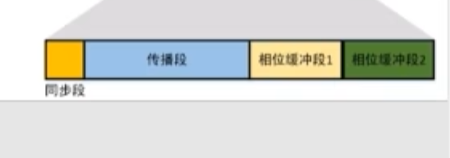
CAN通信的不同分段
收发模式
1.常规模式(向总线发送和接收)
2.回环模式(向总线和本机发送/不从总线接收仅从本机接受)
3.静默模式(不向总线发送,仅向本机发送/从总线和本机接收)
3.回环静默模式(不向总线发送/不从总线接收)
链路传输
地址(CAN ID)
CAN 设备不存在固定的地址
冲突检测和避免
当大家都需要传输信号,CAN采用冲突检测
0是显性电平
误码校验
防止传输过程中的物理误差
CAN采用CRC校验
滤波器与掩码
滤波器负责过滤和通过
CAN通信帧(标准帧)
起始段:标志着帧的开始,为显性电平0(平时为1)
仲裁段:包含11bit的CAN ID,ID越大优先级越低
还包含一个RTR,1bit,显性电平为数据帧,隐形电平为遥控帧
控制段:扩展帧格式标记,显性电平为标准数据帧,隐形电平为扩展帧
保留位0
数据字节的长度数(单位是字节)
数据段:数据内容
校验段:crc校验码15位
crc结束码1
回复段:由接收设备显示显性电平位为正常接收
ack界定符,标志ack结束,为隐性电平1
结束段:标志帧结束,为隐形电平1(1bit)
CubeMX配置与程序编写
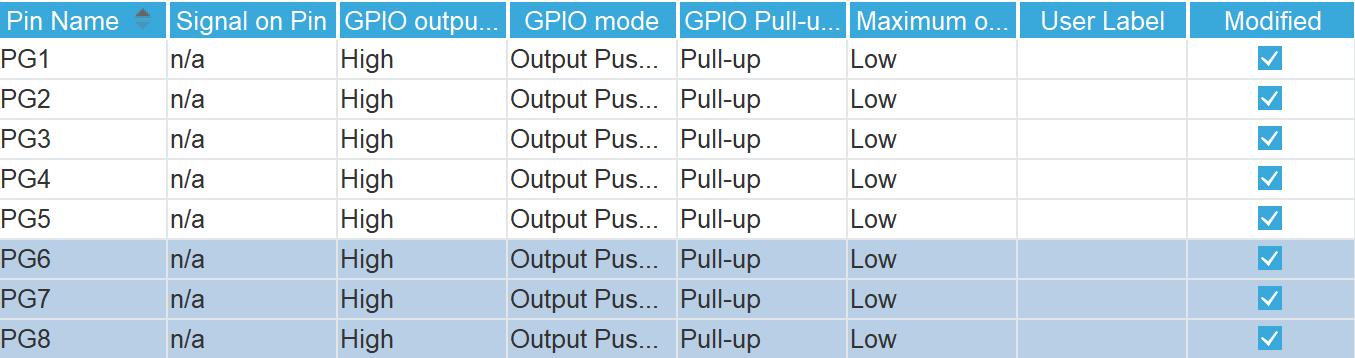
cubemx配置
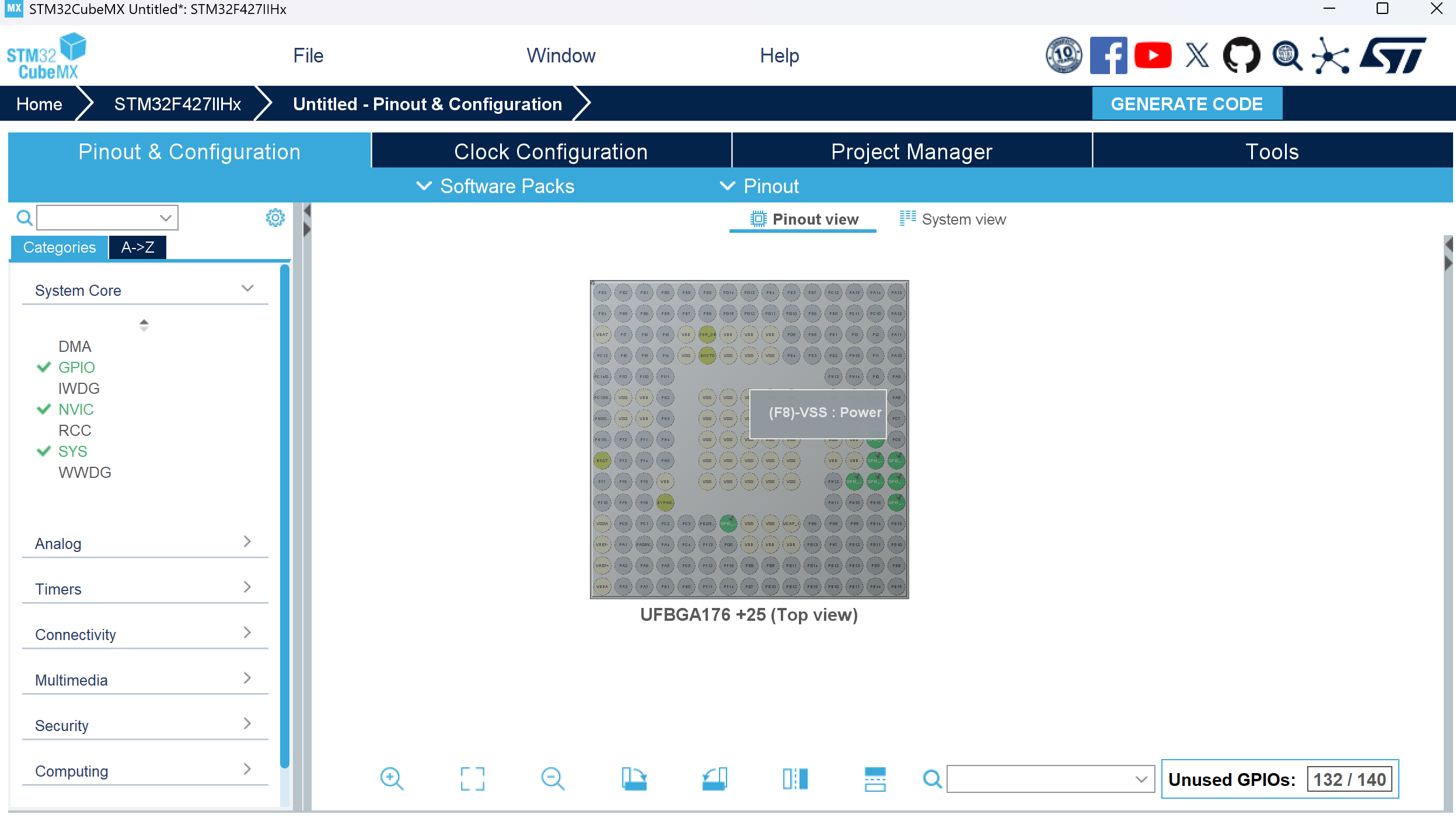
配置GPIO和时钟
写自收自发的can通信,先配置8个输出的LED引脚,分别是PG1-8
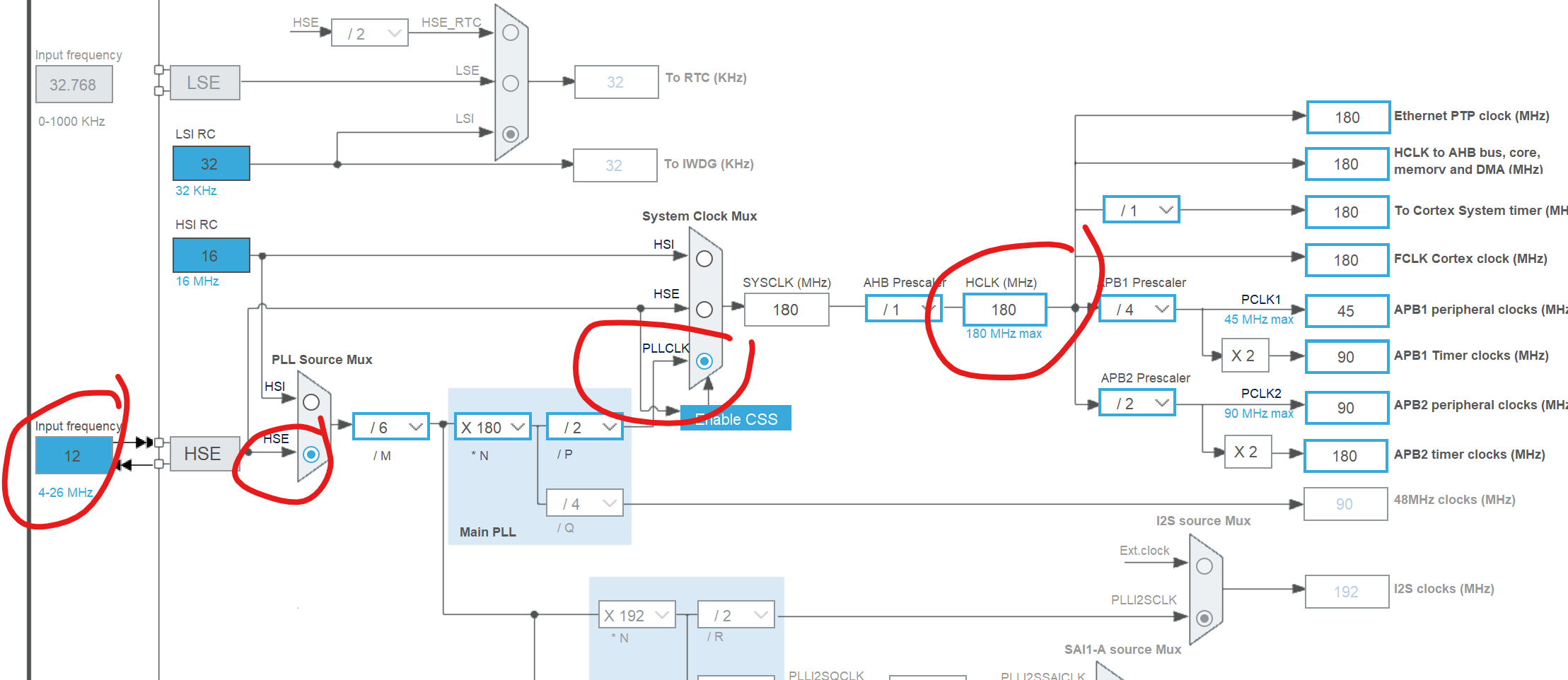
配置相关时钟


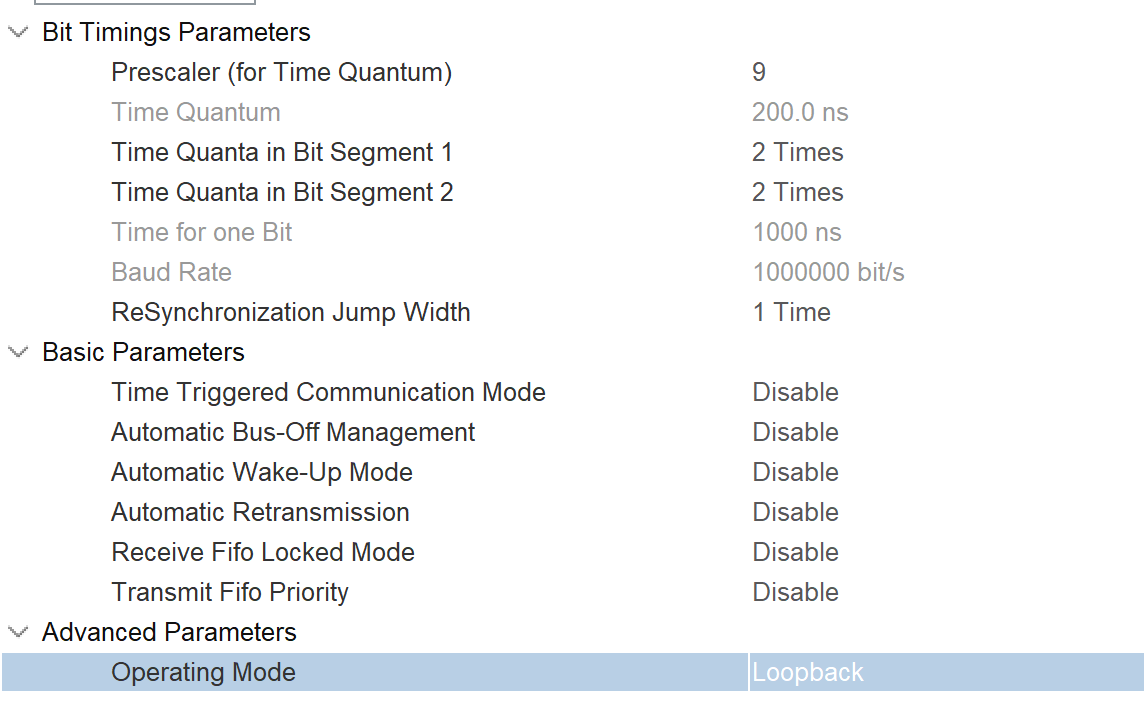
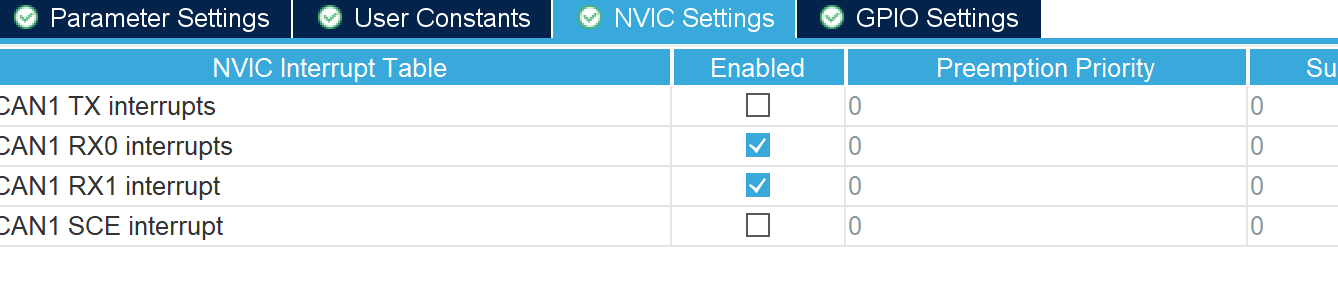
配置CAN
PD0和PD1可以配置can,选用PD0和PD1
相位缓冲段就是BIT SEGMENT 的大小
主程序
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "can.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
// 滤波器编号
#define CAN_FILTER(x) ((x) << 3)
// 接收队列
#define CAN_FIFO_0 (0 << 2)
#define CAN_FIFO_1 (1 << 2)
//标准帧或扩展帧
#define CAN_STDID (0 << 1)
#define CAN_EXTID (1 << 1)
// 数据帧或遥控帧
#define CAN_DATA_TYPE (0 << 0)
#define CAN_REMOTE_TYPE (1 << 0)
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/**
* @brief 初始化CAN总线
*
* @param hcan CAN编号
* @param Callback_Function 处理回调函数
*/
void CAN_Init(CAN_HandleTypeDef *hcan)
{
HAL_CAN_Start(hcan);
__HAL_CAN_ENABLE_IT(hcan, CAN_IT_RX_FIFO0_MSG_PENDING);
__HAL_CAN_ENABLE_IT(hcan, CAN_IT_RX_FIFO1_MSG_PENDING);
}
/**
* @brief 配置CAN的滤波器
*
* @param hcan CAN编号
* @param Object_Para 编号 | FIFOx | ID类型 | 帧类型
* @param ID ID
* @param Mask_ID 屏蔽位(0x3ff, 0x1fffffff)
*/
void CAN_Filter_Mask_Config(CAN_HandleTypeDef *hcan, uint8_t Object_Para, uint32_t ID, uint32_t Mask_ID)
{
CAN_FilterTypeDef can_filter_init_structure;
// 检测关键传参
assert_param(hcan != NULL);
if ((Object_Para & 0x02))
{
// 标准帧
// 掩码后ID的高16bit
can_filter_init_structure.FilterIdHigh = ID << 3 >> 16;
// 掩码后ID的低16bit
can_filter_init_structure.FilterIdLow = ID << 3 | ((Object_Para & 0x03) << 1);
// ID掩码值高16bit
can_filter_init_structure.FilterMaskIdHigh = Mask_ID << 3 << 16;
// ID掩码值低16bit
can_filter_init_structure.FilterMaskIdLow = Mask_ID << 3 | ((Object_Para & 0x03) << 1);
}
else
{
// 扩展帧
// 掩码后ID的高16bit
can_filter_init_structure.FilterIdHigh = ID << 5;
// 掩码后ID的低16bit
can_filter_init_structure.FilterIdLow = ((Object_Para & 0x03) << 1);
// ID掩码值高16bit
can_filter_init_structure.FilterMaskIdHigh = Mask_ID << 5;
// ID掩码值低16bit
can_filter_init_structure.FilterMaskIdLow = ((Object_Para & 0x03) << 1);
}
// 滤波器序号, 0-27, 共28个滤波器, can1是0~13, can2是14~27
can_filter_init_structure.FilterBank = Object_Para >> 3;
// 滤波器绑定FIFOx, 只能绑定一个
can_filter_init_structure.FilterFIFOAssignment = (Object_Para >> 2) & 0x01;
// 使能滤波器
can_filter_init_structure.FilterActivation = ENABLE;
// 滤波器模式, 设置ID掩码模式
can_filter_init_structure.FilterMode = CAN_FILTERMODE_IDMASK;
// 32位滤波
can_filter_init_structure.FilterScale = CAN_FILTERSCALE_32BIT;
//从机模式选择开始单元
can_filter_init_structure.SlaveStartFilterBank = 14;
HAL_CAN_ConfigFilter(hcan, &can_filter_init_structure);
}
/**
* @brief 发送数据帧
*
* @param hcan CAN编号
* @param ID ID
* @param Data 被发送的数据指针
* @param Length 长度
* @return uint8_t 执行状态
*/
uint8_t CAN_Send_Data(CAN_HandleTypeDef *hcan, uint16_t ID, uint8_t *Data, uint16_t Length)
{
CAN_TxHeaderTypeDef tx_header;
uint32_t used_mailbox;
// 检测关键传参
assert_param(hcan != NULL);
tx_header.StdId = ID;
tx_header.ExtId = 0; //扩展帧ID
tx_header.IDE = 0; //是否是扩展帧(标准帧0,扩展帧1)
tx_header.RTR = 0; //是否遥控帧(数据帧0,遥控帧1)
tx_header.DLC = Length; //数据长度
return (HAL_CAN_AddTxMessage(hcan, &tx_header, Data, &used_mailbox));
}
/**
* @brief 点灯
*
* @param data 收到的数据
*/
void LED_Control(uint8_t data)
{
HAL_GPIO_WritePin(GPIOG, GPIO_PIN_1, ((data & 1) == 0) ? GPIO_PIN_SET : GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOG, GPIO_PIN_2, ((data & 2) == 0) ? GPIO_PIN_SET : GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOG, GPIO_PIN_3, ((data & 4) == 0) ? GPIO_PIN_SET : GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOG, GPIO_PIN_4, ((data & 8) == 0) ? GPIO_PIN_SET : GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOG, GPIO_PIN_5, ((data & 16) == 0) ? GPIO_PIN_SET : GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOG, GPIO_PIN_6, ((data & 32) == 0) ? GPIO_PIN_SET : GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOG, GPIO_PIN_7, ((data & 64) == 0) ? GPIO_PIN_SET : GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOG, GPIO_PIN_8, ((data & 128) == 0) ? GPIO_PIN_SET : GPIO_PIN_RESET);
}
/**
* @brief HAL库CAN接收FIFO1中断
*
* @param hcan CAN编号
*/
void HAL_CAN_RxFifo1MsgPendingCallback(CAN_HandleTypeDef *hcan)
{
CAN_RxHeaderTypeDef header;
uint8_t data;
HAL_CAN_GetRxMessage(hcan, CAN_FILTER_FIFO1, &header, &data);
LED_Control(data);
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_CAN1_Init();
/* USER CODE BEGIN 2 */
uint8_t Send_Data = 0;
CAN_Init(&hcan1);
CAN_Filter_Mask_Config(&hcan1, CAN_FILTER(13) | CAN_FIFO_1 | CAN_STDID | CAN_DATA_TYPE, 0x114, 0x7ff);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
Send_Data++;
CAN_Send_Data(&hcan1, 0x114, &Send_Data, 1);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_Delay(250);
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 6;
RCC_OscInitStruct.PLL.PLLN = 180;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Activate the Over-Drive mode
*/
if (HAL_PWREx_EnableOverDrive() != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */

















 1278
1278

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









