




单片机:基于STC89C52RC单片机制作的红外循迹小车(4个传感器)
个人感觉红外循迹小车和那些遥控小车的区别就是信号发射不同:遥控小车是通过遥控器发出信号执行相应的动作,而红外循迹是通过红外传感器检测不同颜色来执行相应的操作,本例是以白底黑线为例。
小车跑道是恩智浦跑道,边缘是五厘米宽的黑线,用于检测识别,由于明年要参加第十五届恩智浦,所以先从51学起
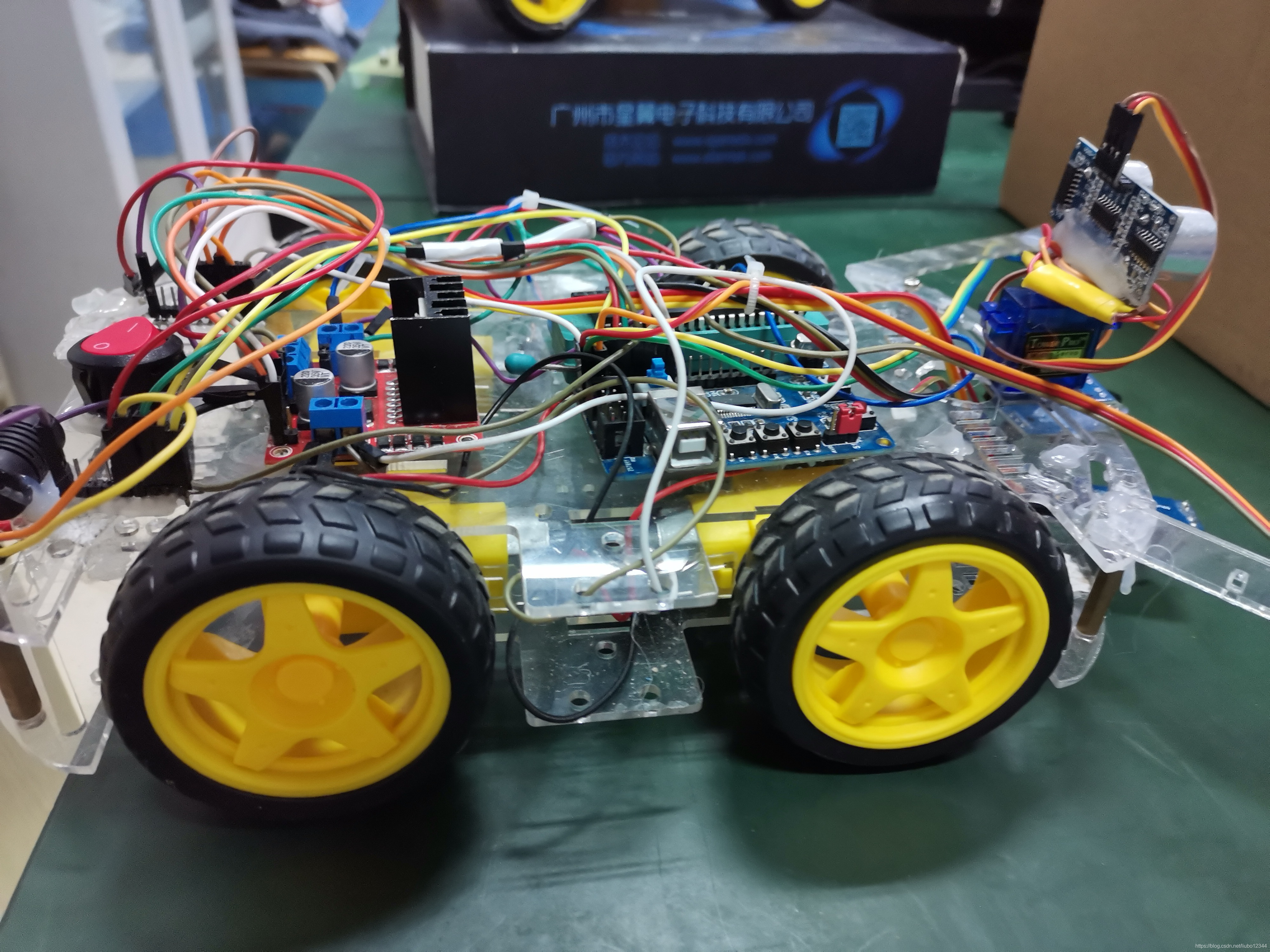
我们先来看看小车所用的材料(硬件部分):
1.小车车壳是亚克力板材质,(后来发现很容易裂开,还不如用块木板)。
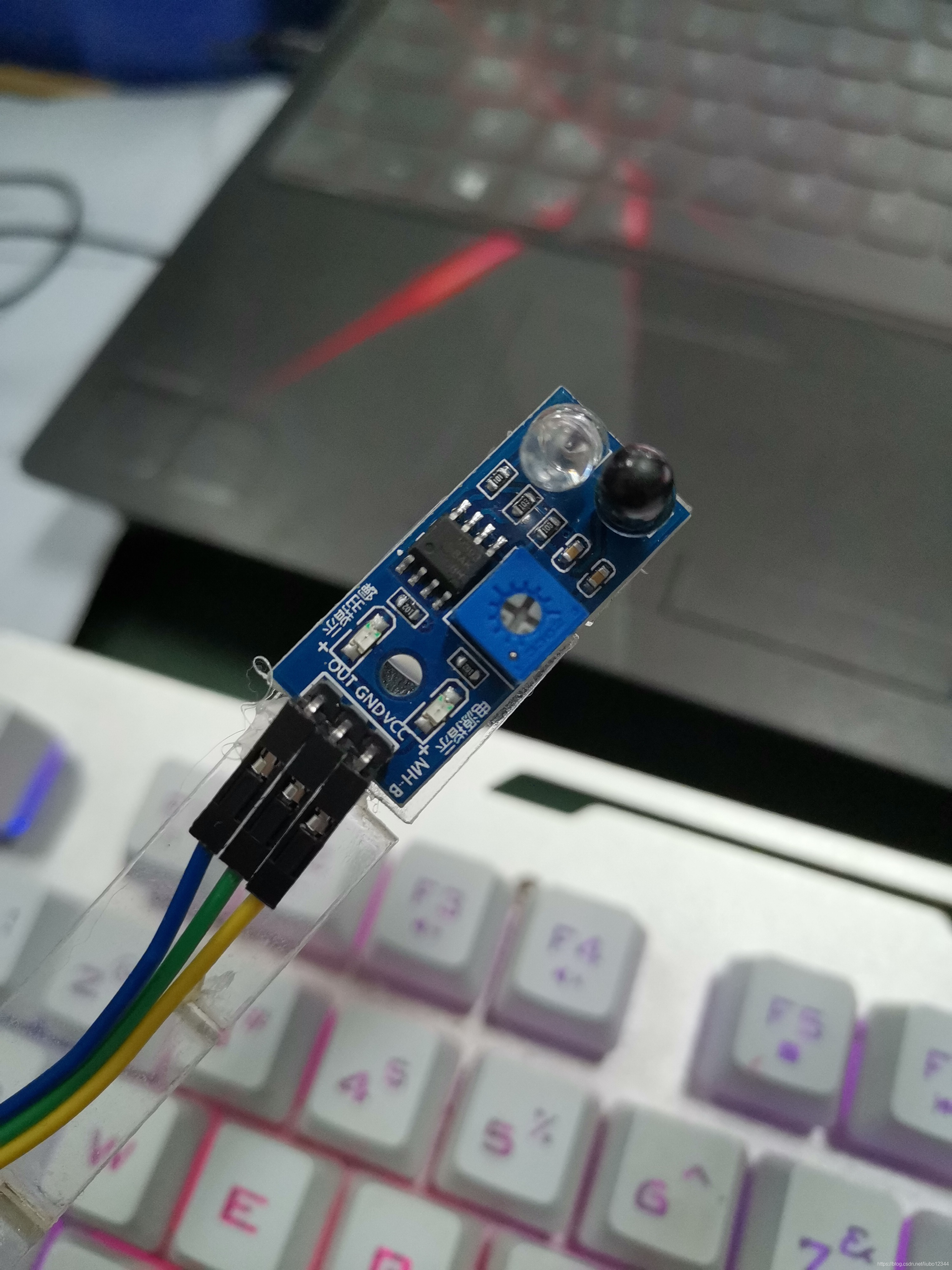
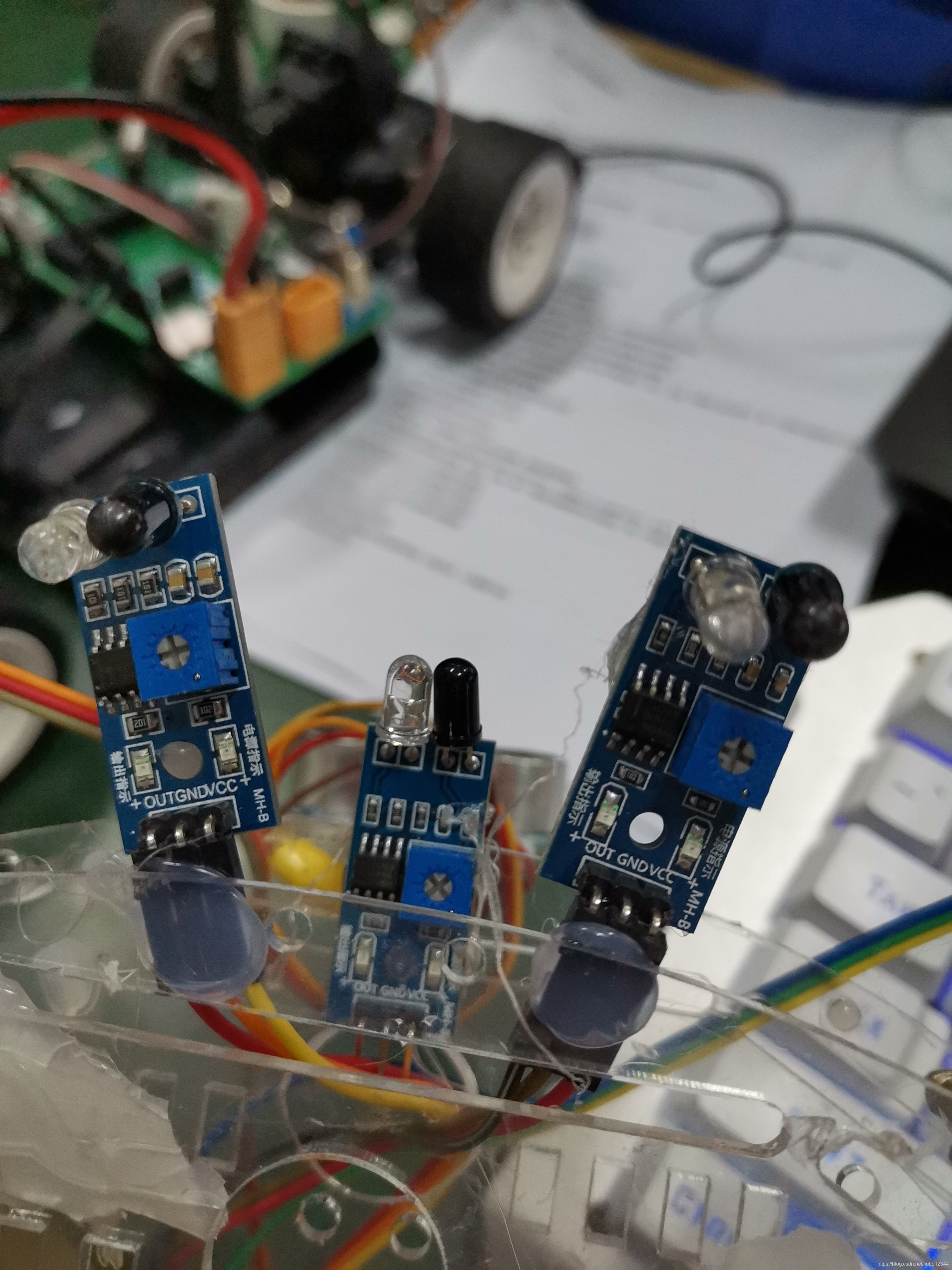
2.红外传感器:该传感器对环境光线适应能力强,当检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,绿色指示灯会亮起,可调节灵敏度,干扰小,可采用3-5V直流电源供电。两边各两个,根据检测的黑白色来执行前进,后退,停止。
连接方式:VCC-VCC,GND-GND,OUT-IO
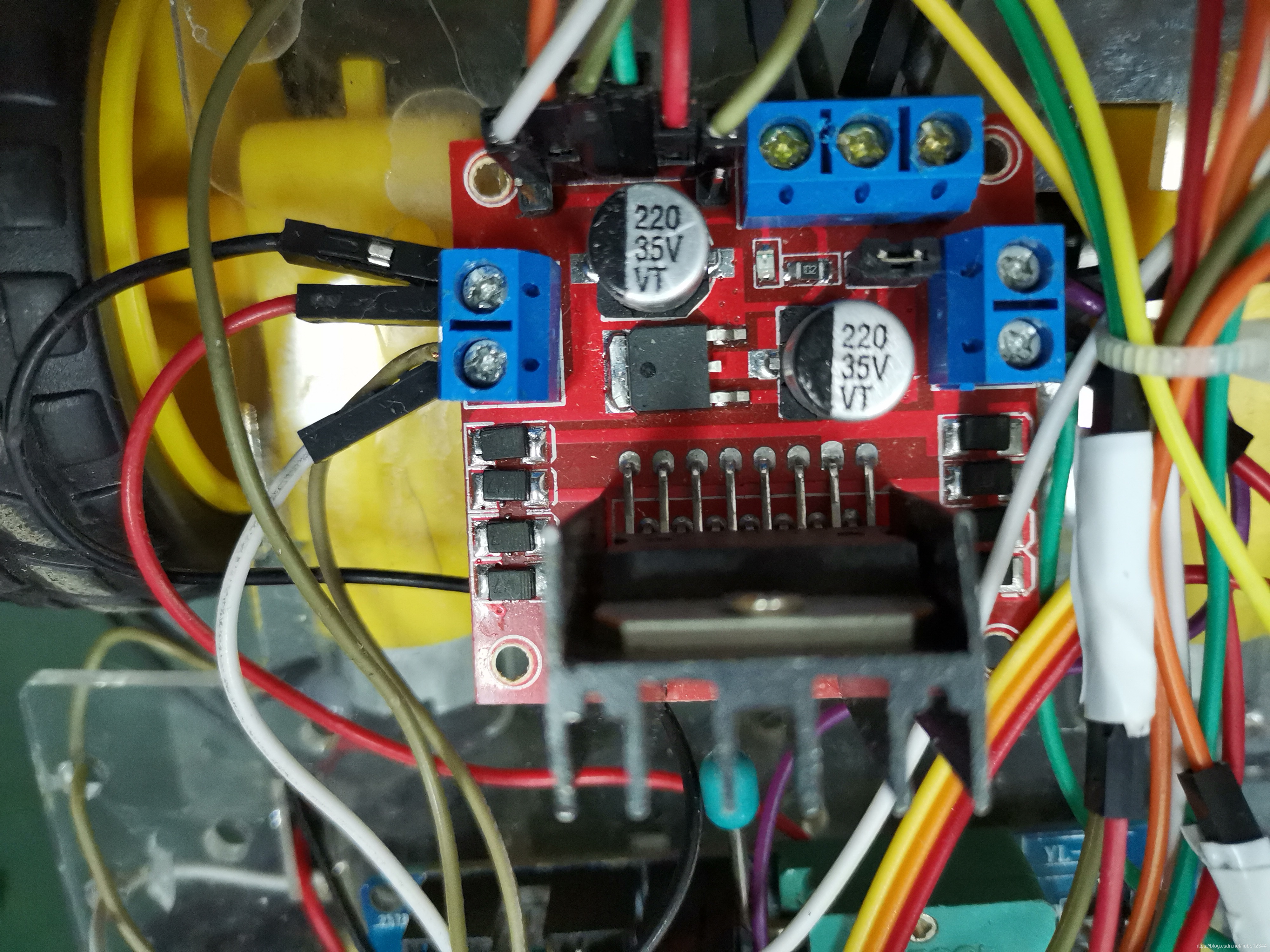
3.驱动:驱动选用L298N,用L298N驱动模块驱动两个直流减速电机。引脚A,B可用于PWM控制。如果直行前进,则可将IN1,IN2和IN3,IN4两对引脚分别接高电平和低电平,仅用单片机的两个端口给出PWM信号控制使能端A,B即可实现直行,转弯,加减速等动作。
接线:ENA,ENB(使能端)——IO
IN1,IN2,IN3,IN4——IO
两侧端口分别连接电机引脚。
4.电池:电池采用的是3000mAh,11.1v的锂电池,

5.使用STC98C52RC芯片,本来自己焊了一个51最小系统,感觉调试的时候比较麻烦,所以用的现成的,取放芯片也方便。
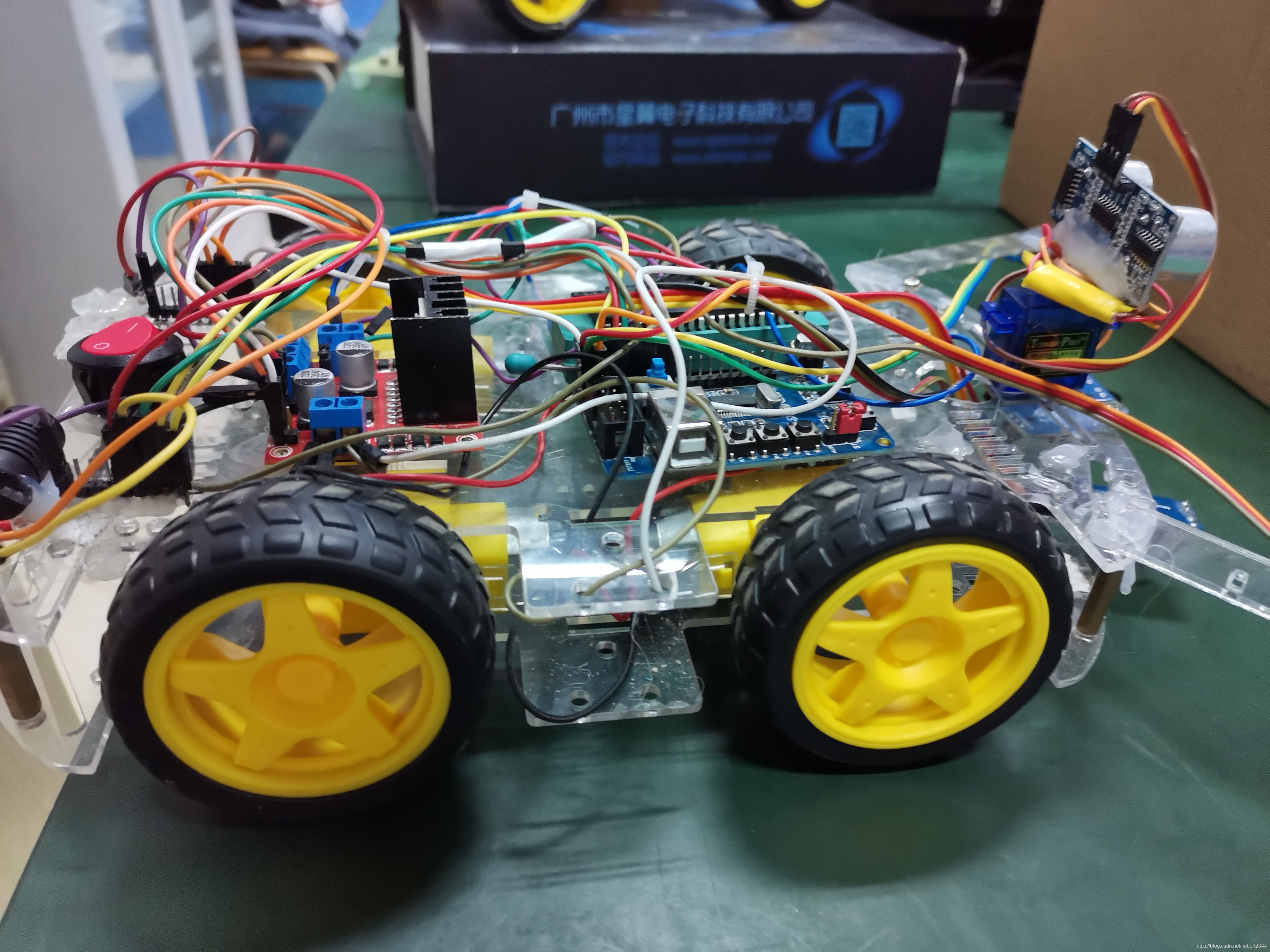
6.前面加了舵机和超声波避障,结果发现没多大用,循迹就可以完成,我就暂且没用它。后面加了两个尾灯,通电后常亮。
我们来看一下整体布局(个人感觉不太好,线有点多,只简单用扎带扎起来)
我们来看看软件部分:
通过控制左右电机运动状态来控制小车。
1.定义正反转和占空比:
void Motor_left(bit ReverOrCoro,uchar DutyCycle) //正反转 占空比
{
if(ReverOrCoro == 1)
{
IN1=1;
if(cnt <= DutyCycle)
{
IN2=0;
}
else
{
IN2=1;
}
}
else
{
IN2=1;
if(cnt <= DutyCycle)
{
IN1=0;
}
else
{
IN1=1;
}
}
}
void Motor_right(bit ReverOrCoro,uchar DutyCycle) //正反转 占空比
{
if(ReverOrCoro == 1)
{
IN3=1;
if(cnt <= DutyCycle)
{
IN4=0;
}
else
{
IN4=1;
}
}
else
{
IN4=1;
if(cnt <= DutyCycle)
{
IN3=0;
}
else
{
IN3=1;
}
}
}
2选择定时器:
void init() //定时器T1工作方式1
{
TMOD=0x10;
TH1 = 0xff;
TL1 = 0x9c;
EA=1;
ET1=1;
TR1=1;
}
3.中断:
void InterruptTime0() interrupt 3
{
TH1=0xff;
TL1=0x9c;
cnt++;
if(cnt>=220)
{
cnt=0;
}
}
4.前进,左转,右转(因为没有障碍区,所以没有写后退函数,当然写的话也挺简单)
void qianjin() //前进
{
Motor_left(1,80);
Motor_right(1,80);
}
void turn_left() //左转
{
Motor_left(1,70);
Motor_right(0,30);
}
void turn_right() //右转
{
Motor_left(0,30);
Motor_right(1,70);
}
5.四个传感器判断前进或转向(这个我先注释了,后面还有两个传感器函数,参见6)
/*void xunji() //四个传感器
{
uchar flag;
if((rsen1==0)&&(lsen1==0)||(rsen2==0)&&(lsen2==0))
{
flag=0;
}
else
if((rsen1==1)&&(lsen1==0)||(rsen2==1)&&(lsen2==0))
{
flag=1;
}
else
if((rsen1==0)&&(lsen1==1)||(rsen2==0)&&(lsen2==1))
{
flag=2;
}
*/
6.两个传感器判断状态
void xunji() //两个传感器
{
uchar flag;
if((rsen1==0)&&(lsen1==0))
{
flag=0;
}
else
if((rsen1==1)&&(lsen1==0))
{
flag=1;
}
else
if((rsen1==0)&&(lsen1==1))
{
flag=2;
}
7.通过信号短检测到的三种情况来执行不同状态函数
switch(flag)
{
case 0:qianjin();break;
case 1:turn_right();break;
case 2:turn_left();break;
default:break;
}
8.主函数
void main()
{
init();
while(1)
{
xunji();
}
}
9.最后给大家看一下全程序(调速还不是很好,转弯有点卡顿,还请大神多多指教qq:1534066323)
#include<reg52.h>
#define uint unsigned int
#define uchar unsigned char
sbit IN1=P1^0;
sbit IN2=P1^1;
sbit IN3=P1^2;
sbit IN4=P1^3;
sbit ENA=P1^4;
sbit ENB=P1^5;
sbit lsen1=P2^0;
sbit rsen1=P2^1;
/*
sbit lsen2=P2^2;
sbit rsen2=P2^3;
*/
void Motor_right(); //声明函数
void Motor_left();
uchar ReverOrCoro;
uchar cnt=0;
/*void delayms(uchar xms)
{
int x,y;
for(x=xms;x>0;x--)
for(y=110;y>0;y--);
}*/
void Motor_left(bit ReverOrCoro,uchar DutyCycle) //正反转 占空比
{
if(ReverOrCoro == 1)
{
IN1=1;
if(cnt <= DutyCycle)
{
IN2=0;
}
else
{
IN2=1;
}
}
else
{
IN2=1;
if(cnt <= DutyCycle)
{
IN1=0;
}
else
{
IN1=1;
}
}
}
void Motor_right(bit ReverOrCoro,uchar DutyCycle) //正反转 占空比
{
if(ReverOrCoro == 1)
{
IN3=1;
if(cnt <= DutyCycle)
{
IN4=0;
}
else
{
IN4=1;
}
}
else
{
IN4=1;
if(cnt <= DutyCycle)
{
IN3=0;
}
else
{
IN3=1;
}
}
}
void init() //定时器T1工作方式1
{
TMOD=0x10;
TH1 = 0xff;
TL1 = 0x9c;
EA=1; //打开总中断
ET1=1;
TR1=1;
}
void InterruptTime0() interrupt 3
{
TH1=0xff;
TL1=0x9c;
cnt++;
if(cnt>=220)
{
cnt=0;
}
}
void qianjin()
{
Motor_left(1,80);
Motor_right(1,80);
}
void turn_left()
{
Motor_left(1,70);
Motor_right(0,30);
}
void turn_right()
{
Motor_left(0,30);
Motor_right(1,70);
}
/*void xunji() //四个传感器
{
uchar flag;
if((rsen1==0)&&(lsen1==0)||(rsen2==0)&&(lsen2==0))
{
flag=0;
}
else
if((rsen1==1)&&(lsen1==0)||(rsen2==1)&&(lsen2==0))
{
flag=1;
}
else
if((rsen1==0)&&(lsen1==1)||(rsen2==0)&&(lsen2==1))
{
flag=2;
}
*/
void xunji() //两个传感器
{
uchar flag;
if((rsen1==0)&&(lsen1==0))
{
flag=0;
}
else
if((rsen1==1)&&(lsen1==0))
{
flag=1;
}
else
if((rsen1==0)&&(lsen1==1))
{
flag=2;
}
switch(flag)
{
case 0:qianjin();break;
case 1:turn_right();break;
case 2:turn_left();break;
default:break;
}
}
void main()
{
init();
while(1)
{
xunji();
}
}

















 1425
1425

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









