






 本文详细描述了在Ubuntu20.14上为无人车项目搭建环境的过程,涉及Docker的安装与修复,ROSSDK的下载和编译验证,以及解决编译时遇到的问题。
本文详细描述了在Ubuntu20.14上为无人车项目搭建环境的过程,涉及Docker的安装与修复,ROSSDK的下载和编译验证,以及解决编译时遇到的问题。
记录一下无人车的环境搭建
准备环境:ubuntu20.14
1.安装docker
sudo apt install doc
sudo apt install docker
报错如下:
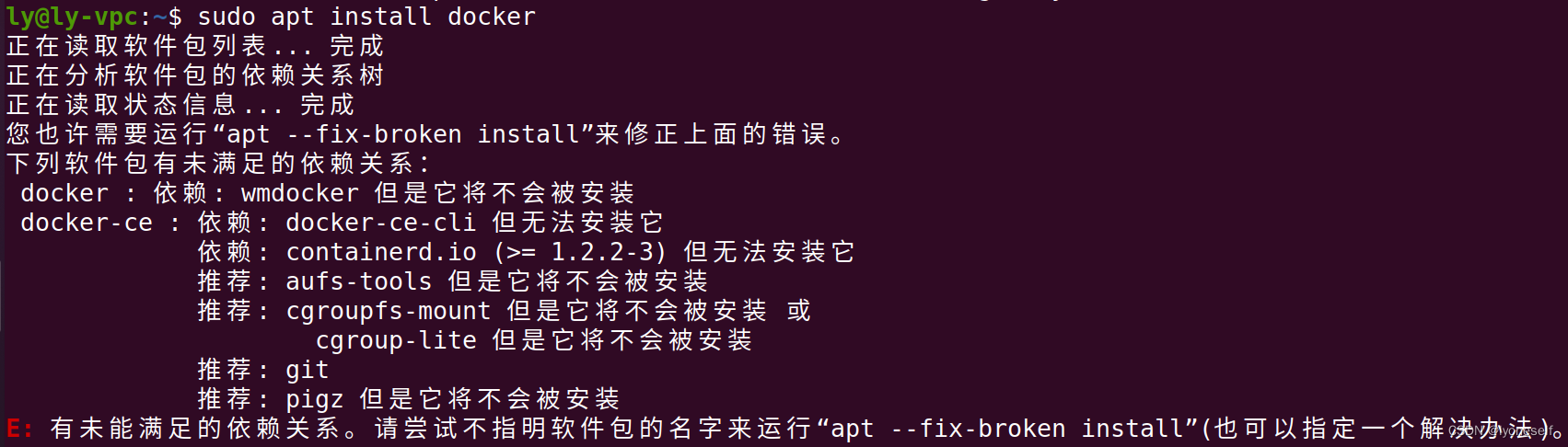
于是输入以下命令:
sudo apt --fix-broken install
再次安装:
sudo apt install docker
sudo apt install docker-ce
sudo apt install docker
sudo apt install docker//多安装几次
sudo apt install docker.io
输入命令:
docker

docker images
2.下载安装SDK-Docker 包
将安装包解压到ubuntu里面,可以看到里面有2个文件:

使用vi命令,编辑run_docker.sh文件
 执行命令:
执行命令:
./run_docker.sh
等待镜像导入并生成容器,等待后就看到我们进入了容器的环境,

这里我们ls一下,可以看到我们刚刚建立的共享文件夹roswheel
进入roswheel:
cd roswheel/
发现有如下几个文件:

在这里进行交叉编译,输出与指定编译器相关的详细版本信息,包括编译器的版本号和配置信息等.
aarch64-bst-linux-gcc -v
gcc -v
输出当前环境中设置的 C 编译器的路径或名称:
echo $CC

在reswheel下执行如下命令:可以运行该脚本文件.sh
./ros-melodic-toolchain-aarch64-x86_64-1.14.5-20230418.sh

显示ROS SDK安装完成。
3.编译验证
再roswheel下,cd到wheel文件夹下,看到有四个文件:

首先,我们复制一份文件:
cp -r install install-old
到这里我们先退出一下:
exit
然后重新进入docker环境:
sudo docker ps -a
sudo docker stop a1000b-sdk-fad-2.3.1.2
sudo docker start a1000b-sdk-fad-2.3.1.2
sudo docker exec -it -u root a1000b-sdk-fad-2.3.1.2 bash
然后重新cd到wheel文件夹下:

然后利用catkin_make去构建软件包:
catkin_make
这里报了错误:
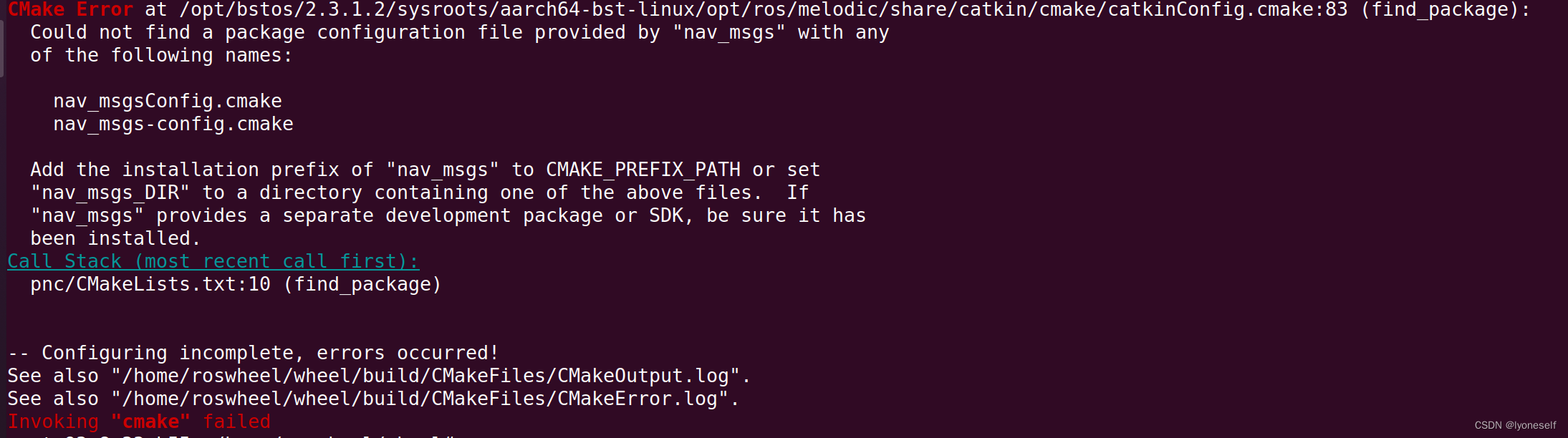
不过这里已经多了两个文件:
build和decel
解决办法:
我们先cd …到roswheel文件夹下,然后发现里面有一个ros-lib-dependence.tar.bz2的压缩文件,我们采用命令将其解压:
tar -zxvf ros-lib-dependence.tar.bz2
解压出文件:lib-dependence
cd ls 发现里面有三个文件夹。

退出到roswheel下,然后将lib-dependence文件copy到/opt/bstos/2.3.1.2/sysroots/aarch64-bst-linux/opt/ros目录下
cp -r lib-dependence /opt/bstos/2.3.1.2/sysroots/aarch64-bst-linux/opt/ros/
然后cd到ros文件夹下:
cd /opt/bstos/2.3.1.2/sysroots/aarch64-bst-linux/opt/ros/
可以发现有两个文件夹:

根据报错,我们cd到lib-dependence文件夹下:
cd lib-dependence/
然后将文件复制到melodic中:
cp -r * ../melodic/
就可以排除错误。
然后我们重新进入到roswheel中:
cd /home/roswheel/wheel/
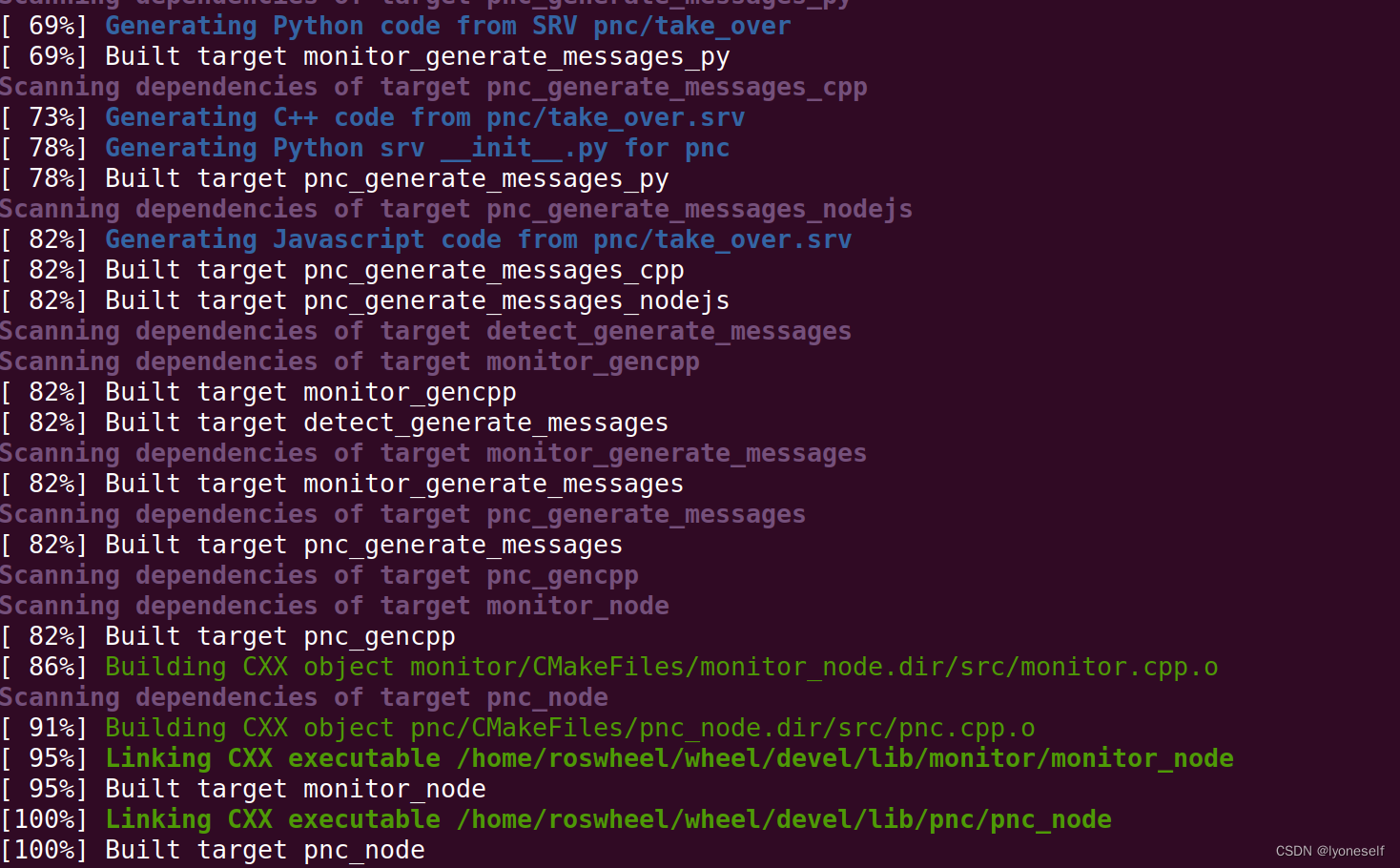
再次catkin_make:
catkin_make
再单独对install文件进行catkin_make:
catkin_make install
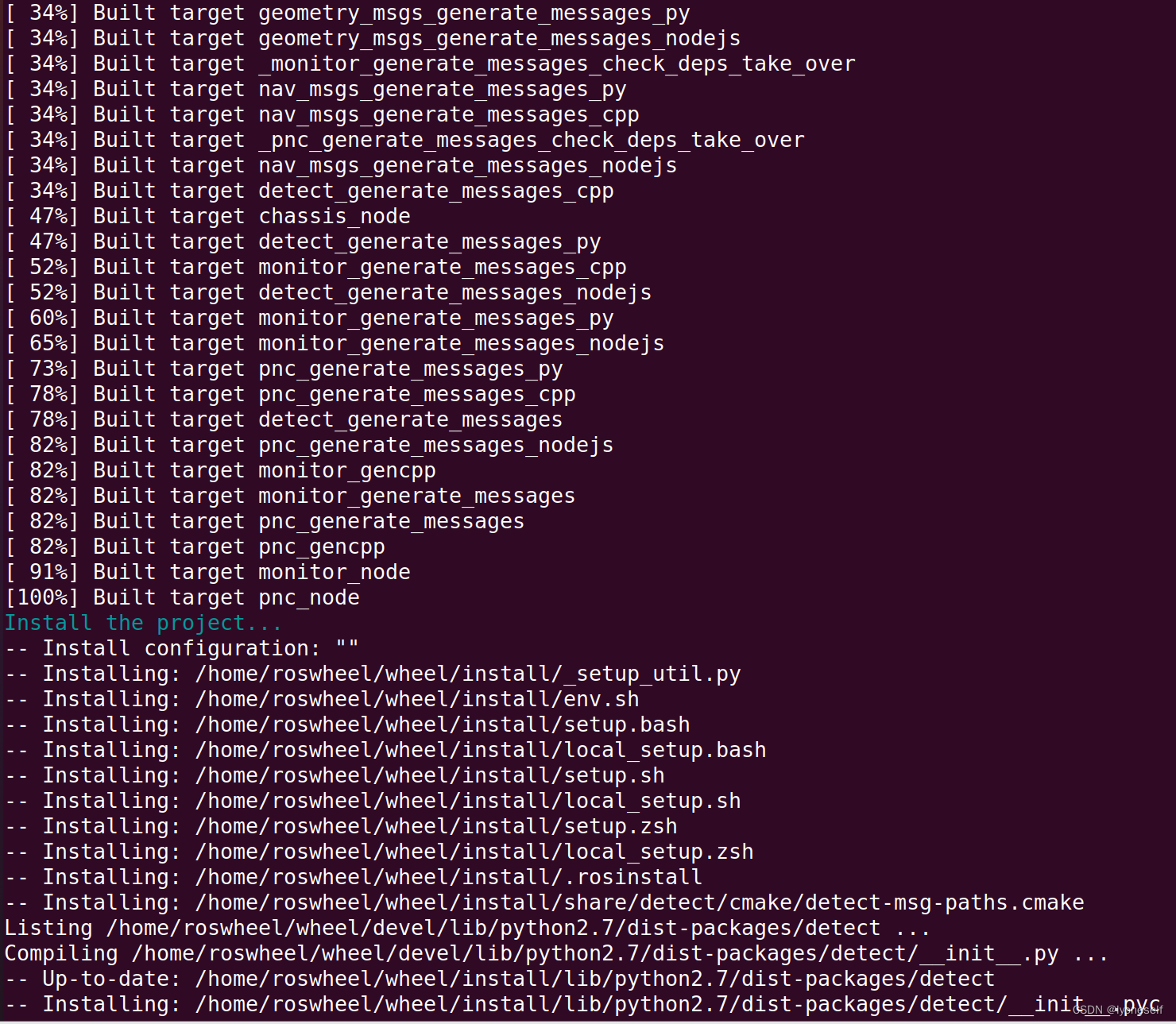
就会执行一系列的步骤。然后我们进入到install,可以看到有如下文件夹:


















 793
793

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









