







1. 引言
如果不明确旋转的定义和物理意义,那么本篇文章是没有意义的。本人曾在一本书籍上见到关于绕z轴旋转θ角的两种不同的旋转表示,也了解旋转在不同领域,甚至同一领域的不同应用场景都有不同的物理意义。
旋转的表示有很多种:旋转矩阵,欧拉角,四元数,轴角,李群与李代数。 旋转的应用场景也有很多种:惯性导航,机器人学(机械臂运动学,无人机姿态估计,SLAM等)。
本文将以旋转矩阵为载体,说明旋转(旋转矩阵)左乘与右乘的不同情况。
2. 本文背景
我们首先给出绕x,y,z轴旋转的旋转矩阵表示:1
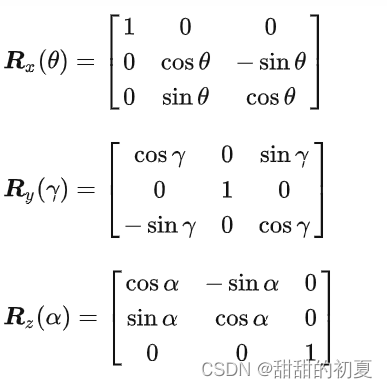
其中,旋转角的正方向由右手螺旋定则给定。注意,绕Y轴旋转的旋转矩阵,-sin在下方。
其实,关于上面三个矩阵,不同书,不同库函数(比如matlab的不同函数,makehgtform与angle2dcm)都不尽相同,我们之所以如此规定,是出于其物理意义。
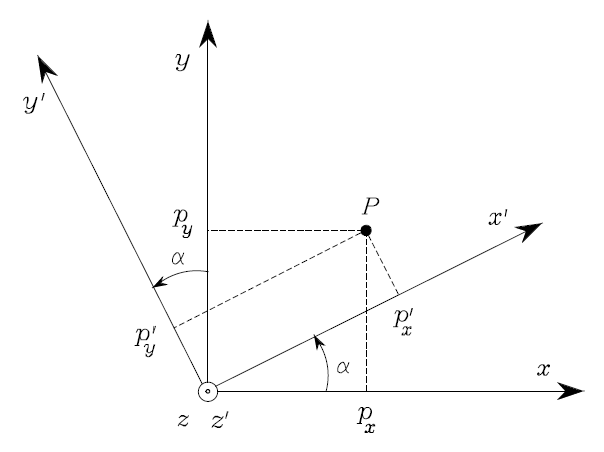
以z轴旋转为例:
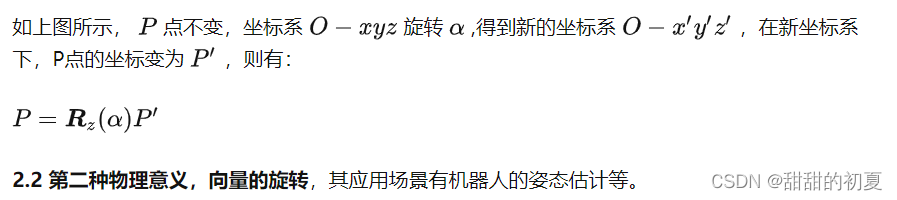
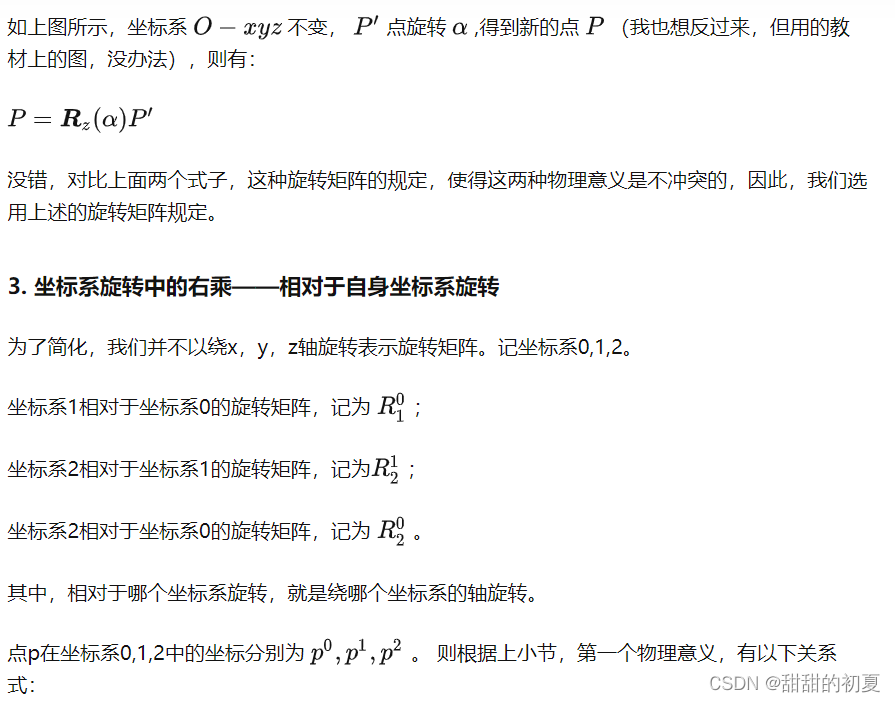
2.1 第一种物理意义,坐标系的旋转,其应用场景有SLAM,机械臂运动学等。
参考链接
旋转矩阵求解欧拉角Python实现_爬虫虫爬虫虫爬爬爬的博客-优快云博客_python 旋转矩阵转欧拉角
已知向量旋转到新向量 / 向量绕轴旋转--四元数使用的python实现_doubtfire的博客-优快云博客_python 向量 旋转

















 2575
2575

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









