




 ORB-SLAM是一种先进的SLAM算法,由西班牙萨拉戈萨大学的研究人员开发,适用于实时三维环境映射和定位。该算法融合了ORB特征、DBOW2视觉词袋法,通过多线程实现追踪、局部建图及闭环检测,实现在光照和视点变化下仍保持良好性能。
ORB-SLAM是一种先进的SLAM算法,由西班牙萨拉戈萨大学的研究人员开发,适用于实时三维环境映射和定位。该算法融合了ORB特征、DBOW2视觉词袋法,通过多线程实现追踪、局部建图及闭环检测,实现在光照和视点变化下仍保持良好性能。
ORB-SLAM
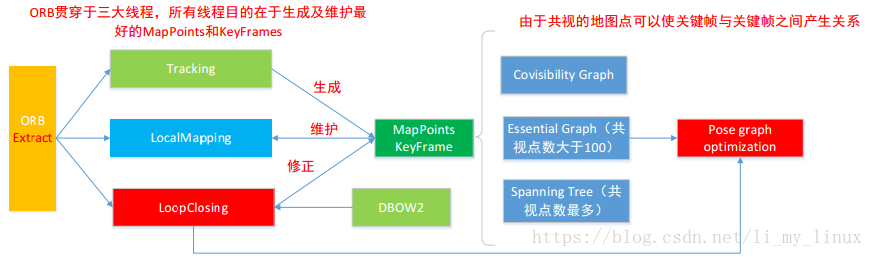
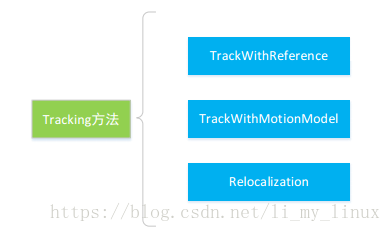
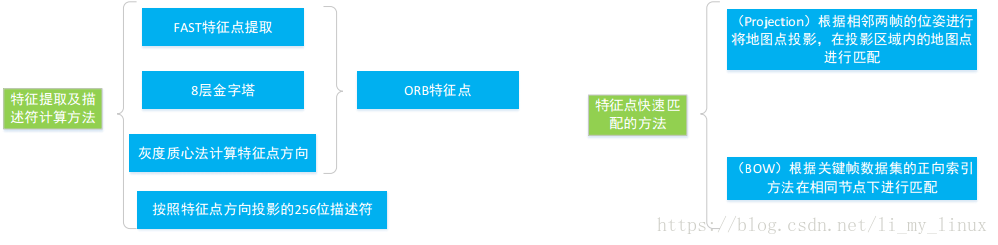
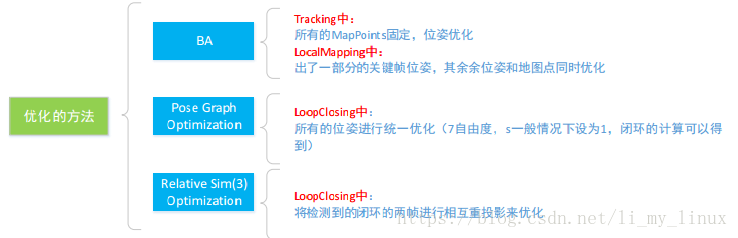
ORB-SLAM是由西班牙萨拉戈萨大学Raul Mur-Artal 和 Juan D. Tard ´ os两人从2012年到2016年开发的目前state of art 的SLAM算法,并实现了开源。该算法是基于特征点SLAM的巅峰之作,它结合了ORB特征、DBOW2视觉词袋法,多线程共同实现追踪Tracking、局部建图LocalMapping(关键帧KeyFrameshe和地图点Mappoints的维护)、及闭环检测(LoopClosing)。接下来将从ORB特征点提取及其匹配方法,KeyFrames和Mappoints的选取及维护,Tracking,LocalMapping,LoopClosing,优化方法等各部分进行分析(主要针对RGB-D的方法)。
优势
- 整个系统,三个线程统一使用ORB特征,实现了在CPU上的实时运行。即使在光照和视点改变的情况下也有较好的结果。
- 得益于闭环检测和重定位,在长期的环境中也好较好的结果。
- 关键帧与地图点生成与维护的条件,covisibility graph的使用。
整体框架
[1]: Fast Relocalisation and Loop Closing in Keyframe-Based SLAM
[2]:ORB-SLAM: Tracking and Mapping Recognizable Features
[3]:ORB-SLAM: a Versatile and Accurate Monocular SLAM System
[4]: ORB-SLAM2: An Open-Source SLAM System for Monocular, Stereo,and RGB-D Cameras
[5]: ORB: an efficient alternative to SIFT or SURF
[6]: Bags of Binary Words for Fast Place Recognition in Image Sequences
[7]: https://blog.youkuaiyun.com/qq_30356613/article/category/6897125 (好的博客解析)

















 1436
1436

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









