



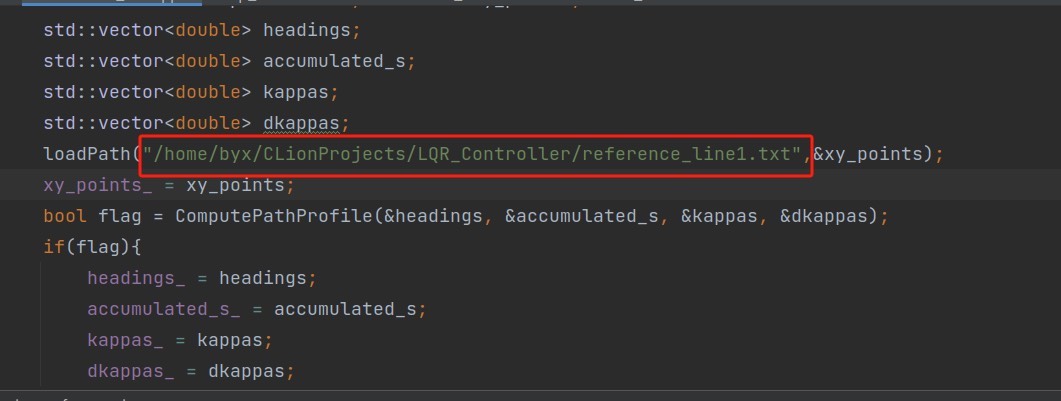
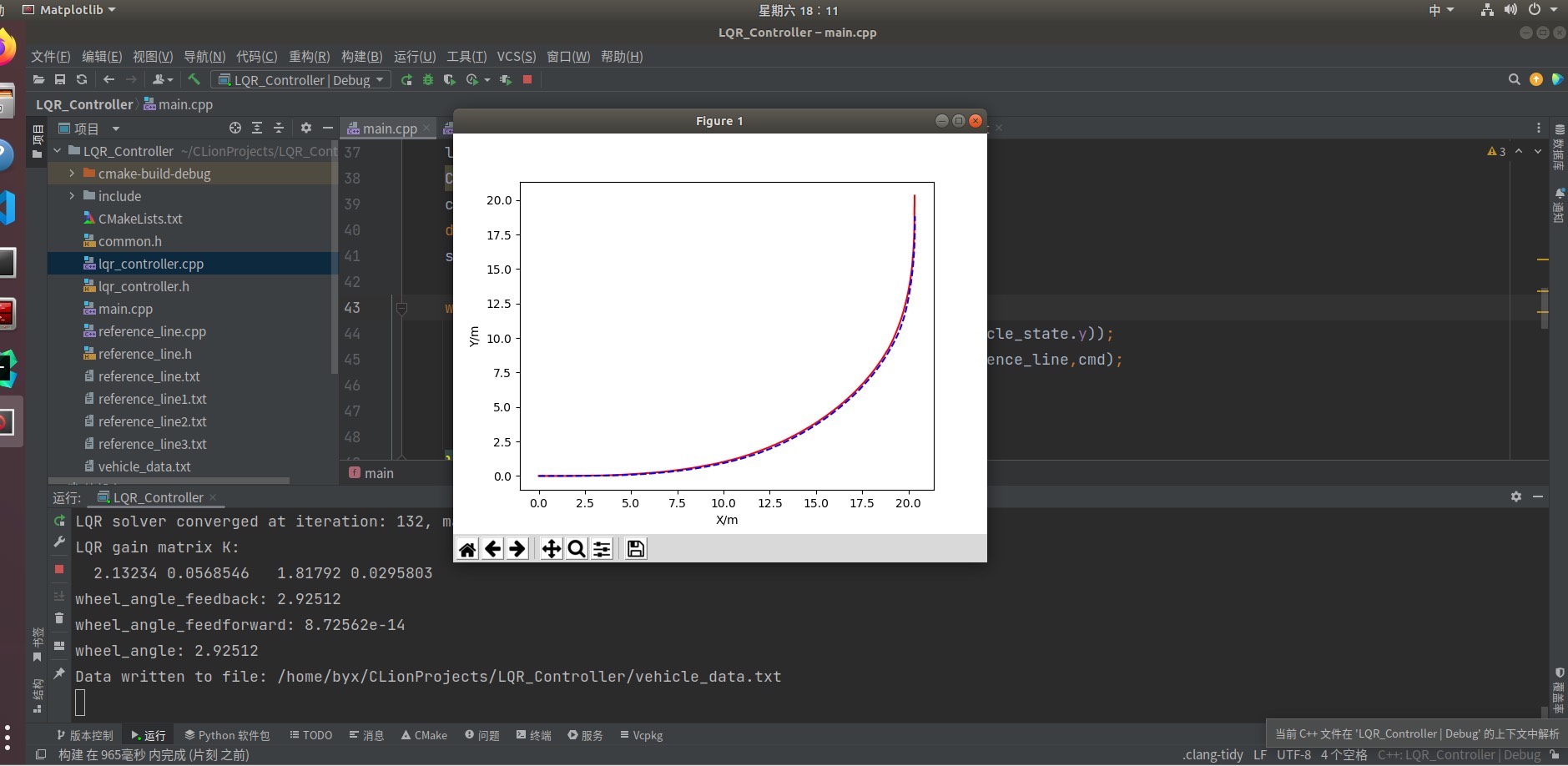
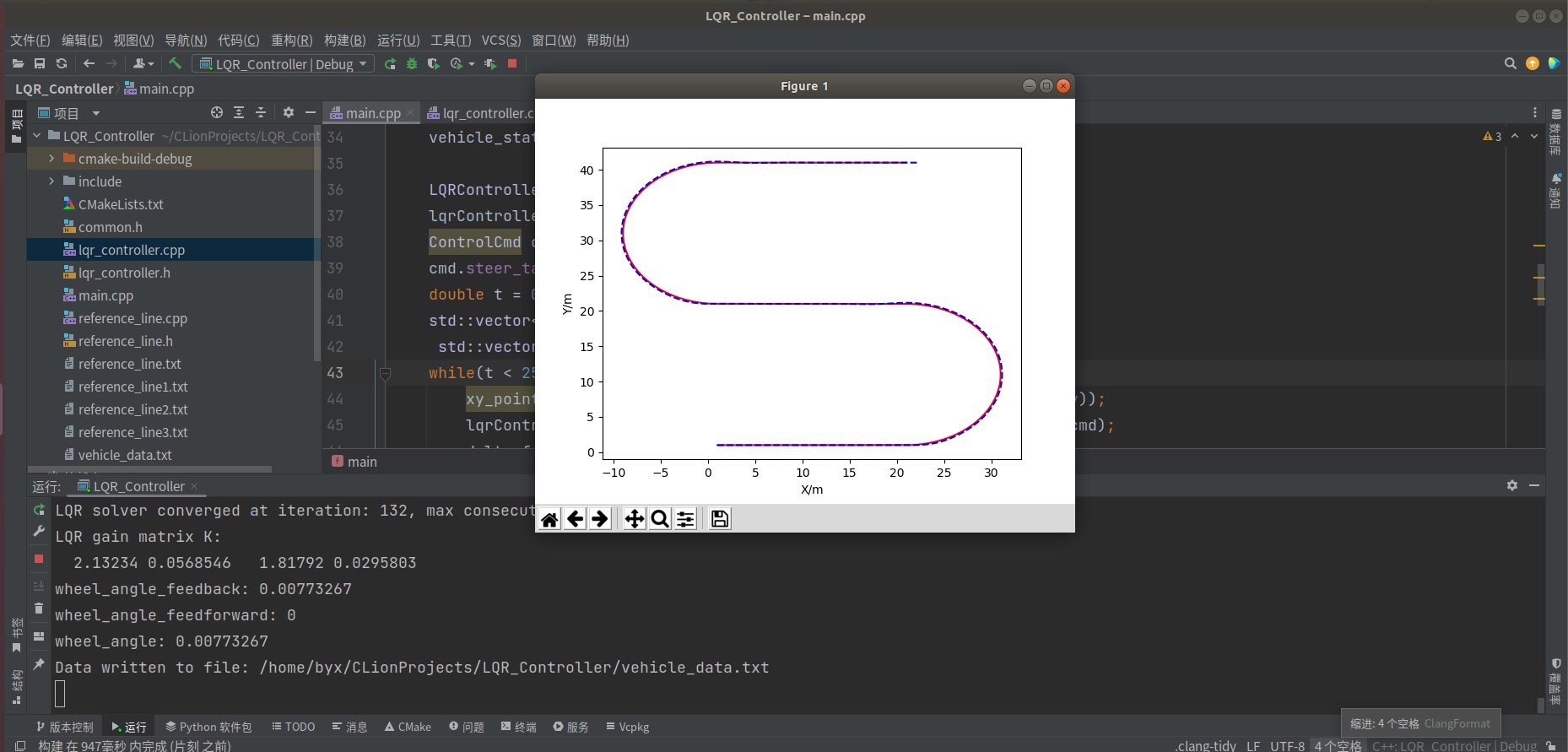
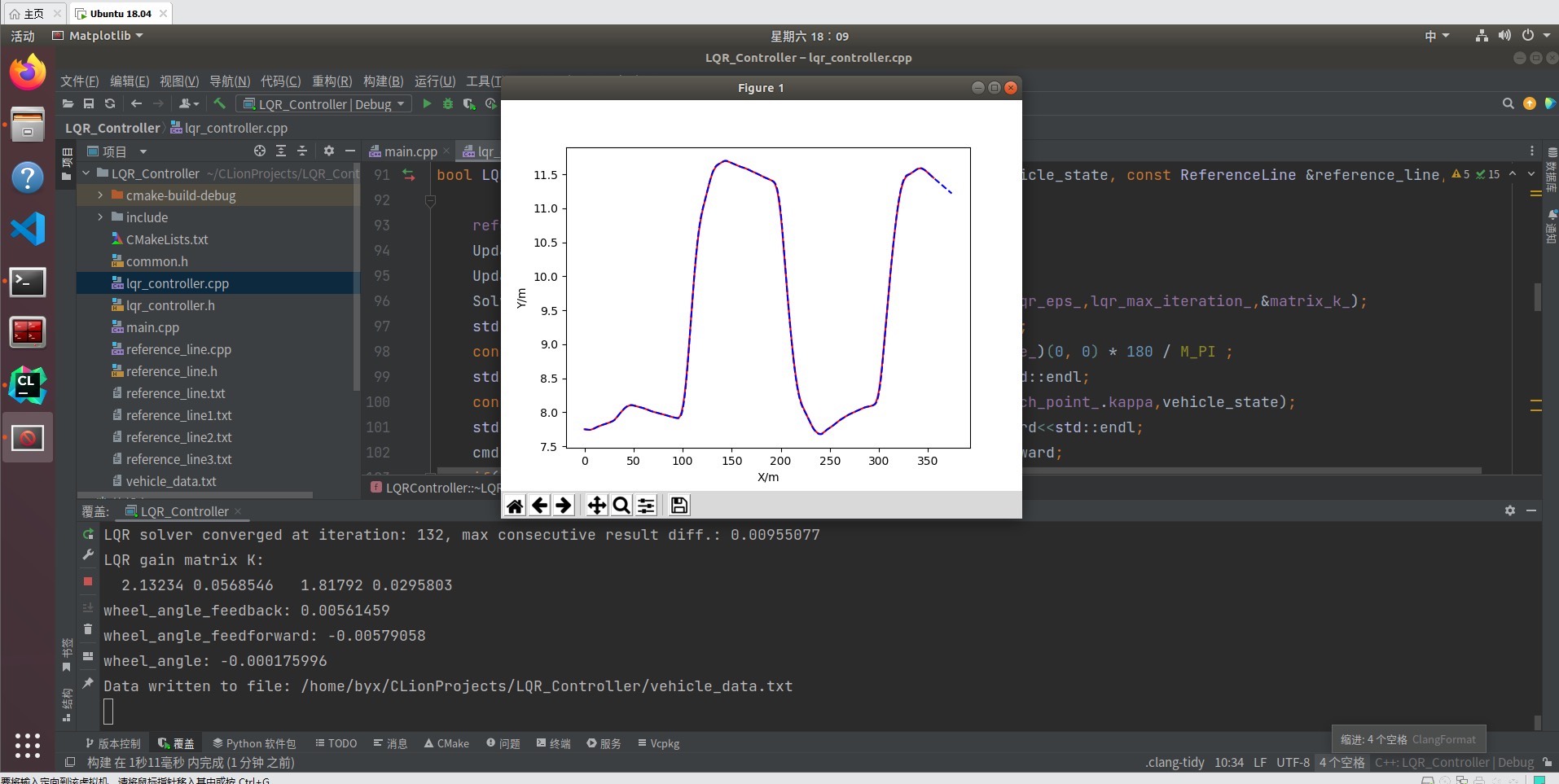
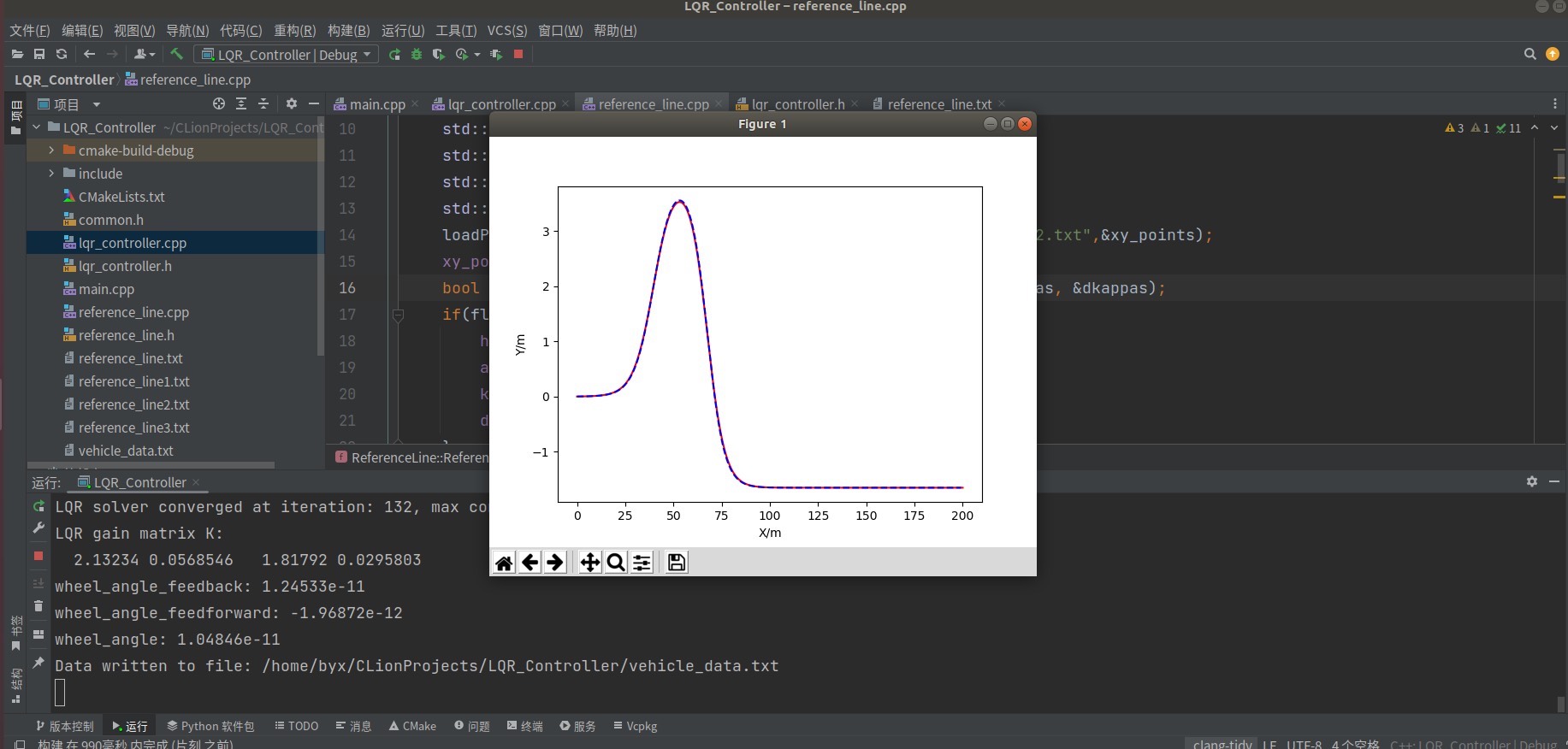
自动驾驶控制-基于动力学跟踪误差模型LQR算法C++纯代码实现,百度apollo横向控制所用模型。 代码注释完整,可以自己看明白,也可以付费提供代码和算法原理讲解服务。 通过C++程序实现的路径跟踪仿真,可视化绘图需要安装matplotlibcpp库,已经提前安装好包含在头文件,同时需要安装Eigen库,文件内也含有安装教程。 可以自定义路径进行跟踪,只需有路径的X Y坐标即可,替换下图中框框标出来的地方路径就可以了。 图片是双移线和一些自定义的路线仿真效果。

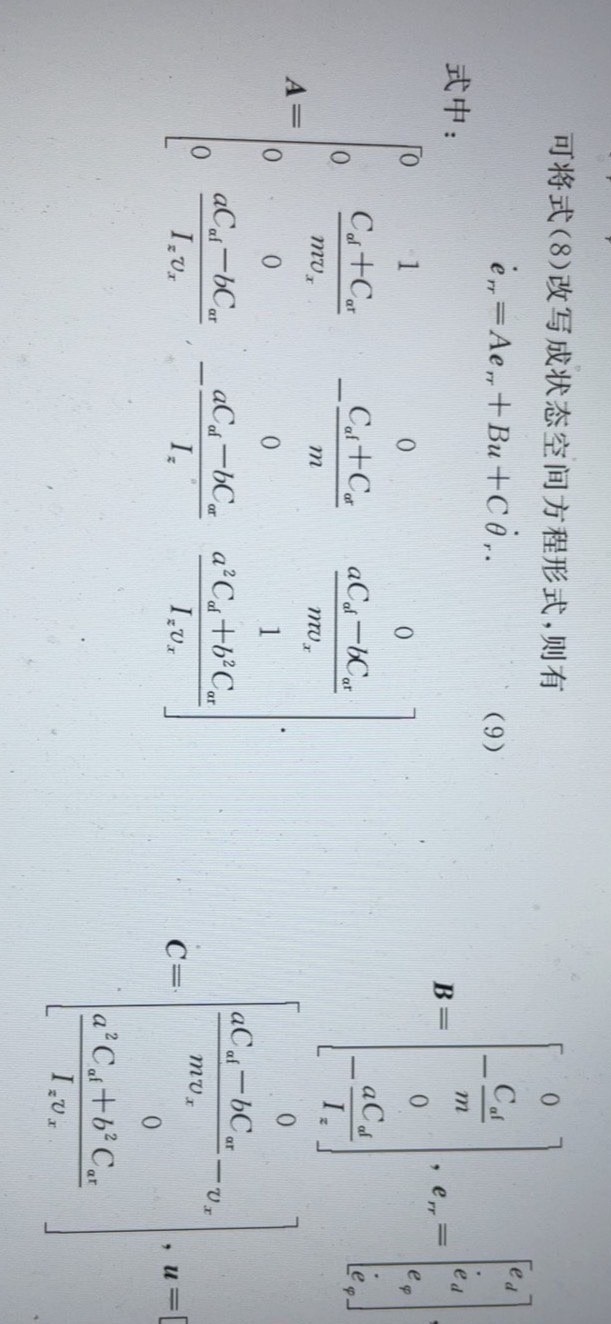
先上硬菜——动力学模型。这里用Apollo同款的误差跟踪模型,状态向量选了五个关键参数:
// 状态向量定义 [横向误差, 误差变化率, 航向误差, 航向变化率, 前轮转角]
Eigen::VectorXd x(5);
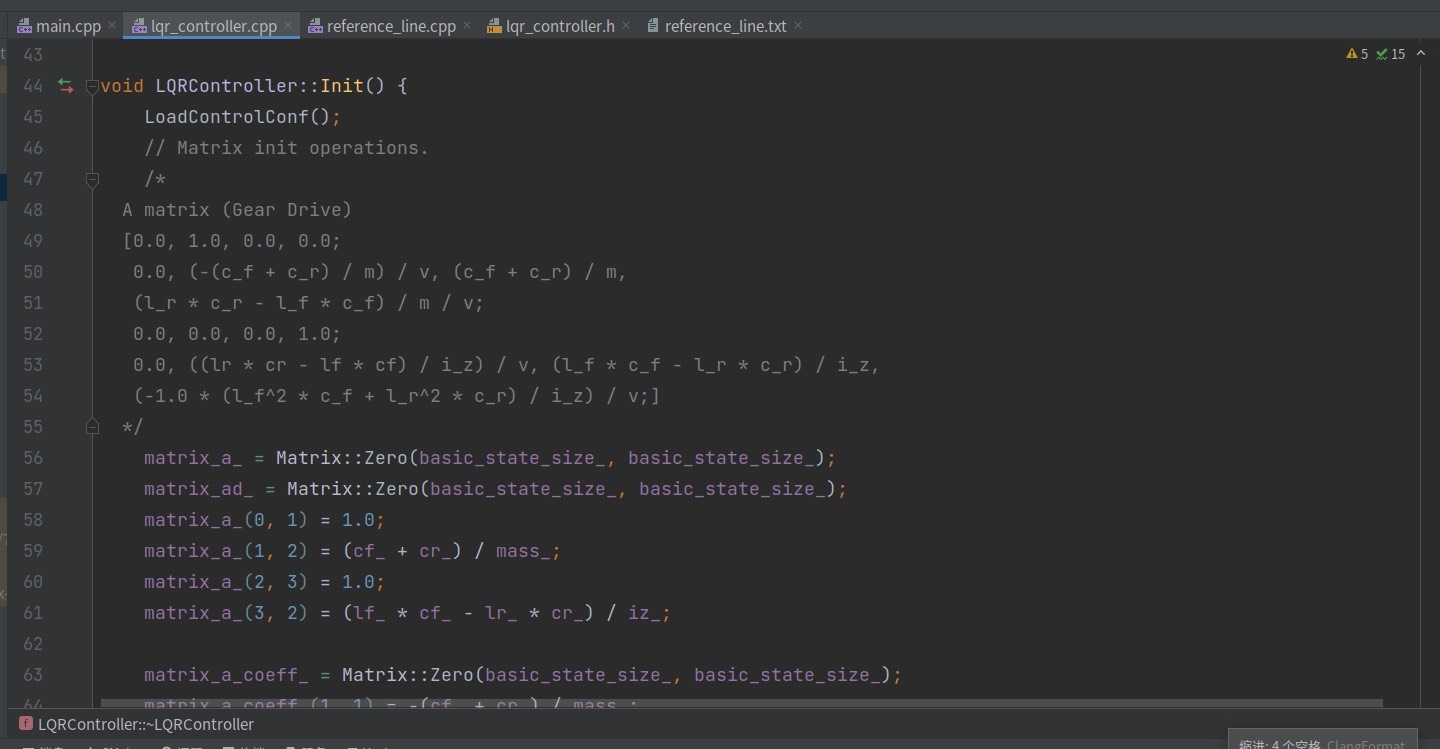
x << lateral_error, lateral_error_rate, heading_error, heading_error_rate, steer_angle;构建系统矩阵时要注意轮胎的魔术公式特性,这里简化后的A、B矩阵初始化:
// 系统矩阵初始化(部分核心参数)
A_(0, 1) = 1.0; // 横向误差微分
A_(1, 1) = -2*(Cf+Cr)/(mass*velocity); // 横向速度阻尼项
A_(1, 3) = 2*(Cf*lf - Cr*lr)/(mass*velocity) - velocity; // 横摆力矩耦合项
B_(1, 0) = 2*Cf/(mass*velocity); // 前轮转角对横向运动影响
B_(3, 0) = 2*Cf*lf/(iz*velocity); // 前轮转角对横摆运动影响LQR求解器才是重头戏,这里用迭代法解Riccati方程:
void solveLQR() {
Eigen::MatrixXd P = Q_;
for (int i = 0; i < max_iteration; ++i) {
Eigen::MatrixXd P_next = Q_ + A_.transpose()*P*A_ -
A_.transpose()*P*B_*(R_ + B_.transpose()*P*B_).inverse()*B_.transpose()*P*A_;
if ((P_next - P).cwiseAbs().maxCoeff() < tolerance) break;
P = P_next;
}
K_ = (R_ + B_.transpose()*P*B_).inverse() * B_.transpose()*P*A_;
}这里有个坑要注意:迭代次数不够会导致控制量震荡,建议设500次迭代保平安。
路径跟踪主循环长这样:
while (!path.empty()) {
// 获取当前误差(此处简化处理)
double target_yaw = atan2(next_wp.y() - current_wp.y(), next_wp.x() - current_wp.x());
double heading_error = target_yaw - current_yaw;
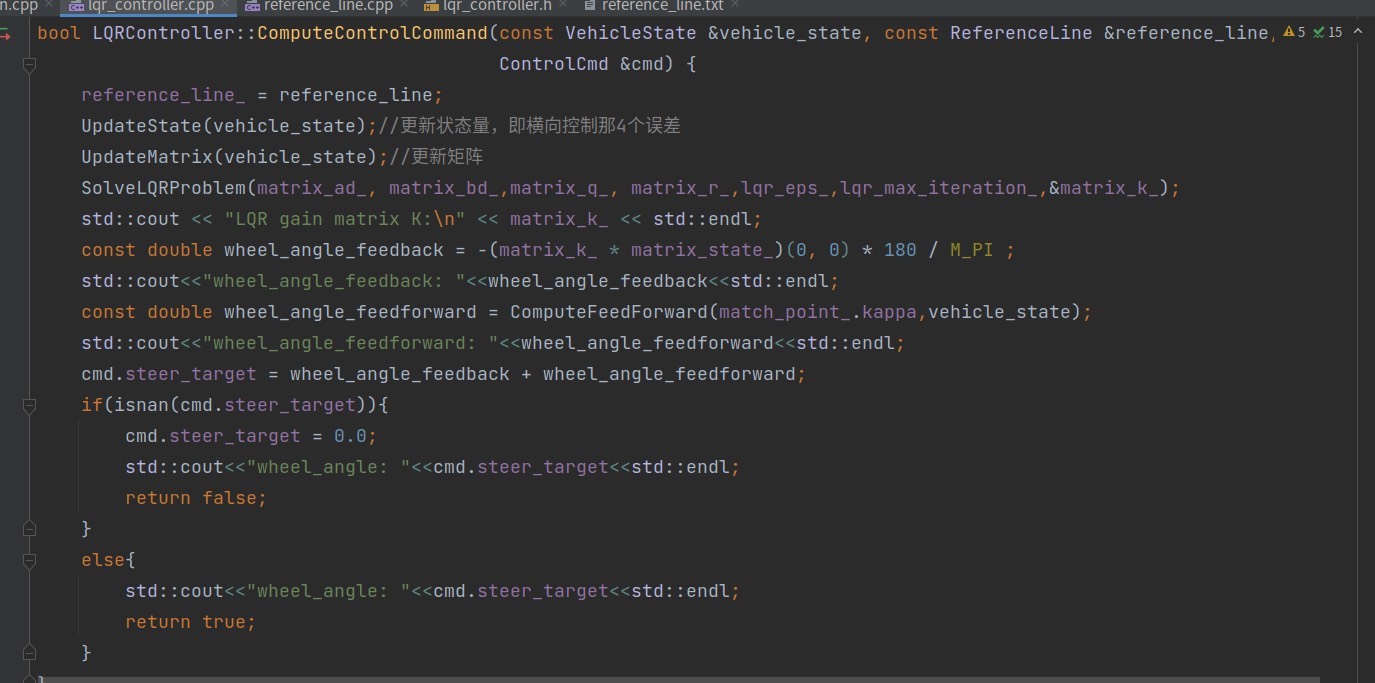
// LQR控制器输出
Eigen::VectorXd control = controller.computeControl(state);
// 更新车辆状态(用二自由度模型简化)
updateVehicleState(control(0), dt);
// 记录轨迹用于绘图
x_hist.push_back(vehicle_x);
y_hist.push_back(vehicle_y);
}换路径比换袜子还简单,找到代码里这个位置:
// ############ 在这里替换你的路径 ##############
std::vector<Eigen::Vector2d> ref_path = {
{0.0, 0.0}, {10.0, 3.0}, {20.0, 0.0}, // 双移线路径
{30.0, -2.0}, {40.0, 0.0}
};
// #############################################实测效果:60km/h下跑双移线,横向误差能控制在0.2米内。有个骚操作——把Q矩阵的横向误差权重调大,车辆会像磁铁一样吸着参考线走。
最后说下怎么画图:
// 画参考路径
plt::plot(x_ref, y_ref, "r--");
// 画实际轨迹
plt::plot(x_hist, y_hist, "b-");
// 装饰图表
plt::title("LQR路径跟踪效果");
plt::xlabel("X (m)");
plt::ylabel("Y (m)");
plt::axis("equal");
plt::show();完整代码里还藏着速度自适应、抗积分饱和等彩蛋功能。需要调参指导或算法原理详解的兄弟,私信扔个红包过来咱们慢慢唠。下期可能整活MPC横向控制,看大伙儿点赞够不够热烈了。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









