



ABAQUS蛙腿折纸模型仿真,从完全折叠状态到完全展开状态
在工程与材料科学领域,折纸结构因其独特的力学性能和可折叠展开特性备受关注。蛙腿折纸模型就是其中一种十分有趣的结构,今天咱就来唠唠用ABAQUS实现蛙腿折纸模型从完全折叠状态到完全展开状态的仿真过程。
模型建立
首先,得在ABAQUS里构建蛙腿折纸的几何模型。蛙腿折纸结构通常由一系列规则排列的折痕构成,这些折痕决定了模型在折叠和展开过程中的变形方式。咱以简单的二维模型为例,使用Python脚本结合ABAQUS的脚本接口来创建几何形状。
from abaqus import *
from abaqusConstants import *
# 创建部件
mdb.models['Model-1'].Part(name='FrogLegPart', dimensionality=TWO_D_PLANAR, type=DEFORMABLE_BODY)
part = mdb.models['Model-1'].parts['FrogLegPart']
# 创建草图
s = mdb.models['Model-1'].ConstrainedSketch(name='__profile__', sheetSize=200.0)
g, v, d, c = s.geometry, s.vertices, s.dimensions, s.constraints
# 绘制蛙腿折纸的基本形状,这里简单示意,实际需精确设计
s.Line(point1=(0, 0), point2=(10, 0))
s.Line(point1=(10, 0), point2=(10, 10))
s.Line(point1=(10, 10), point2=(0, 10))
s.Line(point1=(0, 10), point2=(0, 0))
# 将草图拉伸成二维面
part.BaseShell(sketch=s)
s.unsetPrimaryObject()
del mdb.models['Model-1'].sketches['__profile__']上述代码首先在ABAQUS模型中创建了一个二维可变形体部件。接着在草图中绘制了一个简单的方形(实际蛙腿折纸形状更复杂,这里仅为示意),最后将草图拉伸成二维面,完成了部件的初步创建。
材料与属性定义
蛙腿折纸模型在实际应用中可能使用各种材料,这里假设使用一种常见的弹性材料。在ABAQUS里,通过以下方式定义材料属性。
# 定义材料
mdb.models['Model-1'].Material(name='ElasticMaterial')
mdb.models['Model-1'].materials['ElasticMaterial'].Elastic(table=((1000.0, 0.3),))
# 定义截面属性
mdb.models['Model-1'].HomogeneousShellSection(name='Section-1', material='ElasticMaterial', thickness=1.0)
# 将截面属性赋给部件
part = mdb.models['Model-1'].parts['FrogLegPart']
region = part.cells
part.SectionAssignment(region=region, sectionName='Section-1', offset=0.0, offsetType=MIDDLE_SURFACE, offsetField='', thicknessAssignment=FROM_SECTION)这段代码定义了一个名为“ElasticMaterial”的弹性材料,设置其杨氏模量为1000.0,泊松比为0.3 。然后创建了一个均匀壳截面属性,并将其赋予之前创建的部件。
装配与约束
为了让模型能够正确地从折叠到展开,需要进行合理的装配和约束设置。
# 创建装配实例
assy = mdb.models['Model-1'].rootAssembly
assy.Instance(name='FrogLegInstance', part=part, dependent=ON)
# 添加固定约束
mdb.models['Model-1'].EncastreBC(name='FixedBC', createStepName='Initial', region=assy.instances['FrogLegInstance'].faces.getSequenceFromMask(mask=('[#1 ]',), ), localCsys=None)上述代码将部件实例化到装配体中,并在模型的一个面上添加了固定约束,模拟实际中模型固定的边界条件。
加载与分析步设置
要实现从折叠到展开,得给模型添加合适的载荷和定义分析步。
# 创建分析步
mdb.models['Model-1'].StaticStep(name='UnfoldingStep', previous='Initial', timePeriod=1.0, maxNumInc=1000)
# 施加位移载荷
step = mdb.models['Model-1'].steps['UnfoldingStep']
region = assy.instances['FrogLegInstance'].faces.getSequenceFromMask(mask=('[#2 ]',), )
mdb.models['Model-1'].DisplacementBC(name='UnfoldingLoad', createStepName='UnfoldingStep', region=region, u1=10.0, u2=0.0, ur3=0.0, amplitude=UNSET, fixed=OFF, distributionType=UNIFORM, fieldName='', localCsys=None)这里创建了一个静态分析步“UnfoldingStep”,时长为1秒,最大增量步数为1000 。然后在模型的另一个面上施加了沿x方向10个单位的位移载荷,以此来驱动模型从折叠状态向展开状态变形。
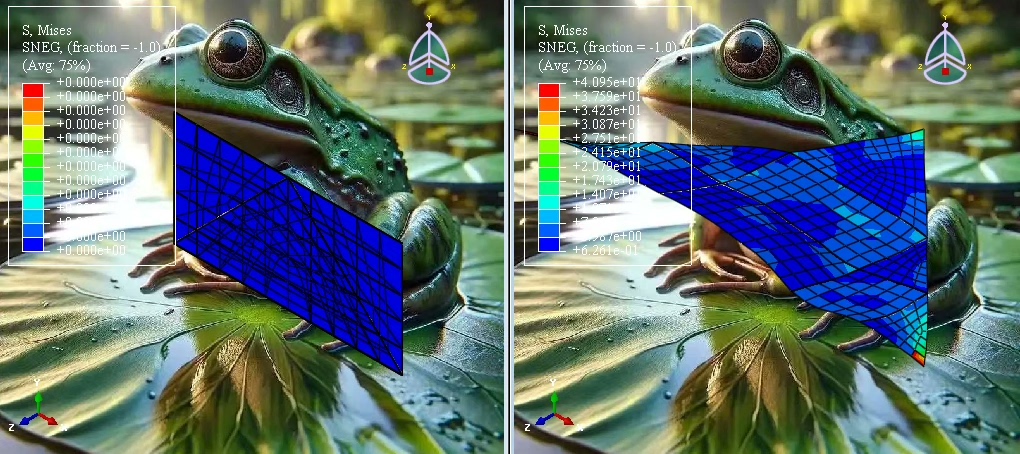
结果查看与分析
仿真计算完成后,就可以查看结果啦。在ABAQUS的后处理模块中,可以观察模型在不同时刻的变形情况,比如等效塑性应变、应力分布等。通过这些结果,能深入了解蛙腿折纸模型在展开过程中的力学响应。例如,观察到某些折痕处应力集中,这就为优化模型设计提供了依据,也许可以通过改变折痕的角度或者材料分布来改善应力集中的情况,使模型的展开过程更加稳定和高效。
通过以上步骤,咱就完成了ABAQUS蛙腿折纸模型从完全折叠状态到完全展开状态的仿真。整个过程不仅涉及到几何建模、材料属性定义,还有装配约束、加载分析等多个方面,每个环节都紧密相连,共同呈现出这一有趣结构的折叠展开动态过程。

















 977
977

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









