




今天又来写笔记了,最近玩Azure kinect 。记录一下用VS 驱动这个相机的代码和坑。具体如下:
(1)整体代码块(代码是在网上下载的参考,我修改了个别语句,已实测可用可出图)
//C++
#include <iostream>
#include <fstream>
#include <chrono>
#include <string>
//OpenCV
#include <opencv2/opencv.hpp>
#include <opencv2/core.hpp>
#include <opencv2/imgcodecs.hpp>
#include <opencv2/highgui.hpp>
#include <opencv2/video.hpp>
//Kinect DK
#include <k4a/k4a.hpp>
#include <math.h>
#include <sstream>
using namespace cv;
using namespace std;
//宏
//方便控制是否 std::cout 信息
#define DEBUG_std_cout 0
static void create_xy_table(const k4a_calibration_t* calibration, k4a_image_t xy_table)
{
k4a_float2_t* table_data = (k4a_float2_t*)(void*)k4a_image_get_buffer(xy_table);
int width = calibration->depth_camera_calibration.resolution_width;
int height = calibration->depth_camera_calibration.resolution_height;
k4a_float2_t p;
k4a_float3_t ray;
int valid;
for (int y = 0, idx = 0; y < height; y++)
{
p.xy.y = (float)y;
for (int x = 0; x < width; x++, idx++)
{
p.xy.x = (float)x;
k4a_calibration_2d_to_3d(
calibration, &p, 1.f, K4A_CALIBRATION_TYPE_DEPTH, K4A_CALIBRATION_TYPE_DEPTH, &ray, &valid);
if (valid)
{
table_data[idx].xy.x = ray.xyz.x;
table_data[idx].xy.y = ray.xyz.y;
}
else
{
table_data[idx].xy.x = nanf("");
table_data[idx].xy.y = nanf("");
}
}
}
}
static void generate_point_cloud(const k4a::image depth_image, const k4a_image_t xy_table, k4a_image_t point_cloud, int* point_count)
{
int width = depth_image.get_width_pixels();
int height = depth_image.get_height_pixels();
//int height = k4a_image_get_height_pixels(depth_image);
uint16_t* depth_data = (uint16_t*)(void*)depth_image.get_buffer();
k4a_float2_t* xy_table_data = (k4a_float2_t*)(void*)k4a_image_get_buffer(xy_table);
k4a_float3_t* point_cloud_data = (k4a_float3_t*)(void*)k4a_image_get_buffer(point_cloud);
*point_count = 0;
for (int i = 0; i < width * height; i++)
{
if (depth_data[i] != 0 && !isnan(xy_table_data[i].xy.x) && !isnan(xy_table_data[i].xy.y))
{
point_cloud_data[i].xyz.x = xy_table_data[i].xy.x * (float)depth_data[i];
point_cloud_data[i].xyz.y = xy_table_data[i].xy.y * (float)depth_data[i];
point_cloud_data[i].xyz.z = (float)depth_data[i];
(*point_count)++;
}
else
{
point_cloud_data[i].xyz.x = nanf("");
point_cloud_data[i].xyz.y = nanf("");
point_cloud_data[i].xyz.z = nanf("");
}
}
}
static void write_point_cloud(const char* file_name, const k4a_image_t point_cloud, int point_count)
{
int width = k4a_image_get_width_pixels(point_cloud);
int height = k4a_image_get_height_pixels(point_cloud);
k4a_float3_t* point_cloud_data = (k4a_float3_t*)(void*)k4a_image_get_buffer(point_cloud);
//save to the ply file
std::ofstream ofs(file_name); // text mode first
ofs << "ply" << std::endl;
ofs << "format ascii 1.0" << std::endl;
ofs << "element vertex"
<< " " << point_count << std::endl;
ofs << "property float x" << std::endl;
ofs << "property float y" << std::endl;
ofs << "property float z" << std::endl;
ofs << "end_header" << std::endl;
ofs.close();
std::stringstream ss;
for (int i = 0; i < width * height; i++)
{
if (isnan(point_cloud_data[i].xyz.x) || isnan(point_cloud_data[i].xyz.y) || isnan(point_cloud_data[i].xyz.z))
{
continue;
}
ss << (float)point_cloud_data[i].xyz.x << " " << (float)point_cloud_data[i].xyz.y << " "
<< (float)point_cloud_data[i].xyz.z << std::endl;
}
std::ofstream ofs_text(file_name, std::ios::out | std::ios::app);
ofs_text.write(ss.str().c_str(), (std::streamsize)ss.str().length());
}
int main(int argc, char* argv[]) {
/*
找到并打开 Azure Kinect 设备
*/
//发现已连接的设备数
const uint32_t device_count = k4a::device::get_installed_count();
if (0 == device_count) {
cout << "Error: no K4A devices found. " << endl;
return -1;
}
else {
std::cout << "Found " << device_count << " connected devices. " << std::endl;
if (1 != device_count)// 超过1个设备,也输出错误信息。
{
std::cout << "Error: more than one K4A devices found. " << std::endl;
return -1;
}
else// 该示例代码仅限对1个设备操作
{
std::cout << "Done: found 1 K4A device. " << std::endl;
}
}
//打开(默认)设备
k4a::device device = k4a::device::open(K4A_DEVICE_DEFAULT);
std::cout << "Done: open device. " << std::endl;
/*
检索并保存 Azure Kinect 图像数据
*/
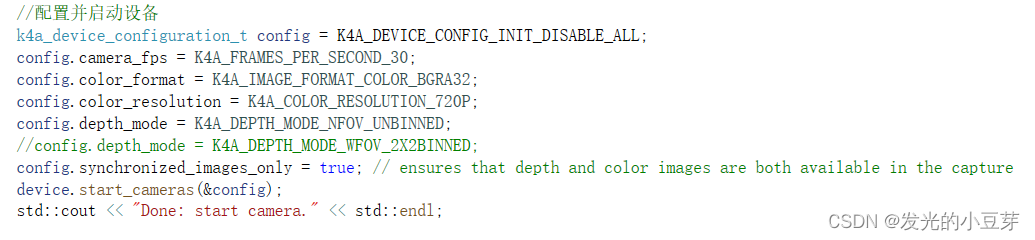
//配置并启动设备
k4a_device_configuration_t config = K4A_DEVICE_CONFIG_INIT_DISABLE_ALL;
config.camera_fps = K4A_FRAMES_PER_SECOND_30;
config.color_format = K4A_IMAGE_FORMAT_COLOR_BGRA32;
config.color_resolution = K4A_COLOR_RESOLUTION_720P;
config.depth_mode = K4A_DEPTH_MODE_NFOV_UNBINNED;
//config.depth_mode = K4A_DEPTH_MODE_WFOV_2X2BINNED;
config.synchronized_images_only = true; // ensures that depth and color images are both available in the capture
device.start_cameras(&config);
std::cout << "Done: start camera." << std::endl;
//写入txt文件流
ofstream rgb_out;
ofstream d_out;
ofstream ir_out;
rgb_out.open("./rgb.txt");
d_out.open("./depth.txt");
ir_out.open("./ir.txt");
rgb_out << "# color images" << endl;
rgb_out << "# file: rgbd_dataset" << endl;
rgb_out << "# timestamp" << " " << "filename" << endl;
d_out << "# depth images" << endl;
d_out << "# file: rgbd_dataset" << endl;
d_out << "# timestamp" << " " << "filename" << endl;
ir_out << "# ir images" << endl;
ir_out << "# file: rgbd_dataset" << endl;
ir_out << "# timestamp" << " " << "filename" << endl;
rgb_out << flush;
d_out << flush;
//稳定化
k4a::capture capture;
int iAuto = 0;//用来稳定,类似自动曝光
int iAutoError = 0;// 统计自动曝光的失败次数
while (true) {
if (/*device.get_capture(&capture, std::chrono::milliseconds(100))*/device.get_capture(&capture)) {
std::cout << iAuto << ". Capture several frames to give auto-exposure" << std::endl;
//跳过前 n 个(成功的数据采集)循环,用来稳定
if (iAuto != 30) {
iAuto++;
continue;
}
else {
std::cout << "Done: auto-exposure" << std::endl;
break;// 跳出该循环,完成相机的稳定过程
}
}
else {
std::cout << iAutoError << ". K4A_WAIT_RESULT_TIMEOUT." << std::endl;
if (iAutoError != 30) {
iAutoError++;
continue;
}
else {
std::cout << "Error: failed to give auto-exposure. " << std::endl;
return -1;
}
}
}
std::cout << "-----------------------------------" << std::endl;
std::cout << "----- Have Started Kinect DK. -----" << std::endl;
std::cout << "-----------------------------------" << std::endl;
//从设备获取捕获
k4a::image rgbImage;
k4a::image depthImage;
k4a::image irImage;
k4a::image transformed_depthImage;
cv::Mat cv_rgbImage_with_alpha;
cv::Mat cv_rgbImage_no_alpha;
cv::Mat cv_depth;
cv::Mat cv_depth_8U;
cv::Mat cv_irImage;
cv::Mat cv_irImage_8U;
while (true)
for (size_t i = 0; i < 100; i++)
{
if (device.get_capture(&capture, std::chrono::milliseconds(0)))
if (device.get_capture(&capture)) {
//rgb
//* Each pixel of BGRA32 data is four bytes.The first three bytes represent Blue, Green,
//*and Red data.The fourth byte is the alpha channel and is unused in the Azure Kinect APIs.
rgbImage = capture.get_color_image();
#if DEBUG_std_cout == 1
std::cout << "[rgb] " << "\n"
<< "format: " << rgbImage.get_format() << "\n"
<< "device_timestamp: " << rgbImage.get_device_timestamp().count() << "\n"
<< "system_timestamp: " << rgbImage.get_system_timestamp().count() << "\n"
<< "height*width: " << rgbImage.get_height_pixels() << ", " << rgbImage.get_width_pixels()
<< std::endl;
#endif
//depth
//* Each pixel of DEPTH16 data is two bytes of little endian unsigned depth data.The unit of the data is in
//* millimeters from the origin of the camera.
depthImage = capture.get_depth_image();
#if DEBUG_std_cout == 1
std::cout << "[depth] " << "\n"
<< "format: " << depthImage.get_format() << "\n"
<< "device_timestamp: " << depthImage.get_device_timestamp().count() << "\n"
<< "system_timestamp: " << depthImage.get_system_timestamp().count() << "\n"
<< "height*width: " << depthImage.get_height_pixels() << ", " << depthImage.get_width_pixels()
<< std::endl;
#endif
//ir
//* Each pixel of IR16 data is two bytes of little endian unsigned depth data.The value of the data represents
//* brightness.
irImage = capture.get_ir_image();
#if DEBUG_std_cout == 1
std::cout << "[ir] " << "\n"
<< "format: " << irImage.get_format() << "\n"
<< "device_timestamp: " << irImage.get_device_timestamp().count() << "\n"
<< "system_timestamp: " << irImage.get_system_timestamp().count() << "\n"
<< "height*width: " << irImage.get_height_pixels() << ", " << irImage.get_width_pixels()
<< std::endl;
#endif
//深度图和RGB图配准
//Get the camera calibration for the entire K4A device, which is used for all transformation functions.
k4a::calibration k4aCalibration = device.get_calibration(config.depth_mode, config.color_resolution);
k4a::transformation k4aTransformation = k4a::transformation(k4aCalibration);
transformed_depthImage = k4aTransformation.depth_image_to_color_camera(depthImage);
cv_rgbImage_with_alpha = cv::Mat(rgbImage.get_height_pixels(), rgbImage.get_width_pixels(), CV_8UC4,
(void*)rgbImage.get_buffer());
cv::cvtColor(cv_rgbImage_with_alpha, cv_rgbImage_no_alpha, cv::COLOR_BGRA2BGR);
cv_depth = cv::Mat(transformed_depthImage.get_height_pixels(), transformed_depthImage.get_width_pixels(), CV_16U,
(void*)transformed_depthImage.get_buffer(), static_cast<size_t>(transformed_depthImage.get_stride_bytes()));
normalize(cv_depth, cv_depth_8U, 0, 256 * 256, NORM_MINMAX);
cv_depth_8U.convertTo(cv_depth, CV_8U, 1);
cv_irImage = cv::Mat(irImage.get_height_pixels(), irImage.get_width_pixels(), CV_16U,
(void*)irImage.get_buffer(), static_cast<size_t>(irImage.get_stride_bytes()));
normalize(cv_irImage, cv_irImage_8U, 0, 256 * 256, NORM_MINMAX);
cv_irImage.convertTo(cv_irImage_8U, CV_8U, 1);
//k4a::image xyzImage;
//cv::Mat cv_xyzImage;// 16位有符号
//cv::Mat cv_xyzImage_32F;// 32位float
//点云
// /*
// Each pixel of the xyz_image consists of three int16_t values, totaling 6 bytes. The three int16_t values are the X, Y, and Z values of the point.
// 我们将为每个像素存储三个带符号的 16 位坐标值(以毫米为单位)。 因此,XYZ 图像步幅设置为 width * 3 * sizeof(int16_t)。
// 数据顺序为像素交错式,即,X 坐标 – 像素 0,Y 坐标 – 像素 0,Z 坐标 – 像素 0,X 坐标 – 像素 1,依此类推。
// 如果无法将某个像素转换为 3D,该函数将为该像素分配值 [0,0,0]。
// */
//xyzImage = k4aTransformation.depth_image_to_point_cloud(depthImage, K4A_CALIBRATION_TYPE_DEPTH);
//cv_xyzImage = cv::Mat(xyzImage.get_height_pixels(), xyzImage.get_width_pixels(), CV_16SC3, (void *)xyzImage.get_buffer(), static_cast<size_t>(xyzImage.get_stride_bytes()));
//cv_xyzImage.convertTo(cv_xyzImage_32F, CV_32FC3, 1.0 / 1000, 0);// 转为float,同时将单位从 mm 转换为 m.
//cv::imshow("xyzimage", cv_xyzImage_32F);
//show image
cv::imshow("color", cv_rgbImage_no_alpha);
cv::imshow("depth", cv_depth_8U);
cv::imshow("ir", cv_irImage_8U);
//save image
double time_rgb = static_cast<double>(std::chrono::duration_cast<std::chrono::microseconds>(
rgbImage.get_device_timestamp()).count());
std::string filename_rgb = std::to_string(time_rgb / 1000000) + ".png";
double time_d = static_cast<double>(std::chrono::duration_cast<std::chrono::microseconds>(
depthImage.get_device_timestamp()).count());
std::string filename_d = std::to_string(time_d / 1000000) + ".png";
double time_ir = static_cast<double>(std::chrono::duration_cast<std::chrono::microseconds>(
irImage.get_device_timestamp()).count());
std::string filename_ir = std::to_string(time_ir / 1000000) + ".png";
imwrite("./rgb/" + filename_rgb, cv_rgbImage_no_alpha);
imwrite("./depth/" + filename_d, cv_depth_8U);
imwrite("./ir/" + filename_ir, cv_irImage_8U);
//const int32_t TIMEOUT_IN_MS = 1000;
//std::string file_name;
//uint32_t device_count = 0;
//k4a_device_t device1 = NULL;
//k4a_device_configuration_t config1 = K4A_DEVICE_CONFIG_INIT_DISABLE_ALL;
//k4a_capture_t capture1 = NULL;
//k4a_image_t depth_image = NULL;
//k4a_calibration_t calibration1;
k4a_image_t xy_table = NULL;
k4a_image_t point_cloud = NULL;
int point_count = 0;
double time_point = static_cast<double>(std::chrono::duration_cast<std::chrono::microseconds>(
rgbImage.get_device_timestamp()).count());
std::string filename_point = std::to_string(time_point / 1000000) + ".ply";
//file_name = "./pointcloud.ply";
/* device_count1 = k4a_device_get_installed_count();
if (device_count1 == 0)
{
printf("No K4A devices found\n");
return 0;
}*/
/*if (K4A_RESULT_SUCCEEDED != k4a_device_open(K4A_DEVICE_DEFAULT, &device))
{
printf("Failed to open device\n");
}*/
/* config1.depth_mode = K4A_DEPTH_MODE_WFOV_2X2BINNED;
config1.camera_fps = K4A_FRAMES_PER_SECOND_30;*/
/* k4a_device_get_calibration(device1, config1.depth_mode, config1.color_resolution, &calibration1);*/
k4a_image_create(K4A_IMAGE_FORMAT_CUSTOM,
k4aCalibration.depth_camera_calibration.resolution_width,
k4aCalibration.depth_camera_calibration.resolution_height,
k4aCalibration.depth_camera_calibration.resolution_width * (int)sizeof(k4a_float2_t),
&xy_table);
create_xy_table(&k4aCalibration, xy_table);
k4a_image_create(K4A_IMAGE_FORMAT_CUSTOM,
k4aCalibration.depth_camera_calibration.resolution_width,
k4aCalibration.depth_camera_calibration.resolution_height,
k4aCalibration.depth_camera_calibration.resolution_width * (int)sizeof(k4a_float3_t),
&point_cloud);
/* k4a_device_start_cameras(device, &config);
k4a_device_get_capture(device, &capture, TIMEOUT_IN_MS);*/
//depth_image = k4a_capture_get_depth_image(capture1);
if (depthImage == 0)
{
printf("Failed to get depth image from capture\n");
}
generate_point_cloud(depthImage, xy_table, point_cloud, &point_count);
write_point_cloud(filename_point.c_str(), point_cloud, point_count);
/* k4a_image_release(depthImage);
k4a_capture_release(capture);*/
k4a_image_release(xy_table);
k4a_image_release(point_cloud);
//returnCode = 0;
//k4a_device_close(device1);
std::cout << "Acquiring!" << endl;
//写入depth.txt, rgb.txt文件
rgb_out << std::to_string(time_rgb / 1000000) << " " << "rgb/" << filename_rgb << endl;
d_out << std::to_string(time_d / 1000000) << " " << "depth/" << filename_d << endl;
ir_out << std::to_string(time_ir / 1000000) << " " << "ir/" << filename_ir << endl;
rgb_out << flush;
d_out << flush;
ir_out << flush;
k4aTransformation.destroy();
cv_rgbImage_with_alpha.release();
cv_rgbImage_no_alpha.release();
cv_depth.release();
cv_depth_8U.release();
cv_irImage.release();
cv_irImage_8U.release();
capture.reset();
if (cv::waitKey() == 'q')
{//按键采集,用户按下'q',跳出循环,结束采集
std::cout << "----------------------------------" << std::endl;
std::cout << "------------- closed -------------" << std::endl;
std::cout << "----------------------------------" << std::endl;
break;
}
}
else {
std::cout << "false: K4A_WAIT_RESULT_TIMEOUT." << std::endl;
}
}
cv::destroyAllWindows();
rgb_out << flush;
d_out << flush;
ir_out << flush;
rgb_out.close();
d_out.close();
ir_out.close();
// 释放,关闭设备
rgbImage.reset();
depthImage.reset();
irImage.reset();
capture.reset();
device.close();
return 1;
}
参考代码博客:
https://blog.youkuaiyun.com/weixin_42532587/article/details/111054649
https://blog.youkuaiyun.com/qq_40936780/article/details/102634734?utm_medium=distribute.pc_relevant.none-task-blog-title-3&spm=1001.2101.3001.4242
感谢!!!
(2)基于VS 驱动运行Azure Kinect的注意事项
1)#include <k4a/k4a.hpp> 不识别
说明 我们还没有安装好SDK,那么按照下列步骤在VS 中安装SDK
》》找到解决方案—引用—管理NuGet程序包(N)…
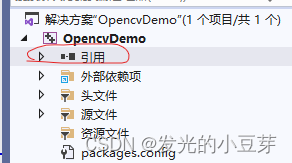
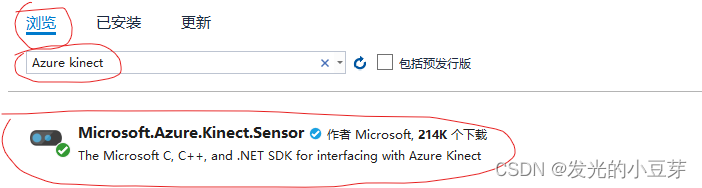
》》进入浏览-搜索 Azure kinect 安装 Azure Kinect.Sensor就可以驱动起来了
2)报错 K4A WAIT RESULTTIMEOUT
检查USB连接是不是3.0
检查代码语句 很多人根据这个语句来判断:device.get_capture(&capture, std::chrono::milliseconds(0))
这个肯定会time out,因为milliseconds(0) 呀,
那么 改成
device.get_capture(&capture, std::chrono::milliseconds(100)) 试试吧
或者 就用我程序中的 device.get_capture(&capture)
3)报错奇怪的路径 2024-06-11 14:04:11.120] error D: \a\1\s \extern(Azure-Kinect-Sensor-SDKlsrc dewrapper(dewrapper,c (266): depth engine thread(). SDK
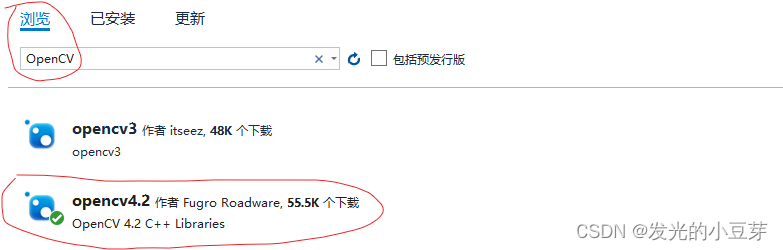
那可以升级一下openCV到4.2(还是用Nuget管理包来升级)
》》找到解决方案—引用—管理NuGet程序包(N)…
》》浏览-OpenCV -->安装openCV 4.2
4)当前demo 给的深度图不是彩色的看起来不太舒服,要再改改代码。如下参数需要跟硬件设备Azure Kinect的型号适配好,否则也不会出图。
不清楚参数,可以先用上一篇博客中的方法预览一下并检查一下相机参数。
https://blog.youkuaiyun.com/learner_jj/article/details/139591602?spm=1001.2014.3001.5502

















 3983
3983

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









