



用于重型平台微调的线性运动机构
摘要
本文描述了用于重型平台精细位置调节的线性运动机构的设计、开发和实验。提出了包含精密电动机/执行器、滚珠丝杠运动传感器以及基于柔性/弹性机构的无间隙运动减速器的概念。文中给出了设计、实验设备及测量结果。该配置能够利用现有的滚珠丝杠机构,从而降低整个定位系统的成本。
关键词 :柔性机构 · Force reducer/amplifier · 微动调整
1 引言
机器人技术几乎应用于所有工业活动领域。总体而言,当前大多数工业应用对机器人的参数和性能要求已基本满足。工业机器人速度快、精度高,能够完全替代人工进行生产作业。它们被广泛用于各种操作或其他工艺工作中,可重复定位精度达到10−2 mm或更高。除了已在技术上得到充分验证的应用外,在建筑、重工业、军事或研究领域还存在一些特殊任务,需要对带有可变负载的大型重型平台进行极为精确的位置/姿态调整。由于施工中的累积误差、零部件制造误差以及热变形或弯曲变形引起的误差通常大于所需的调整精度。此类特定用途的示例包括用于宇宙或物理研究的天线/反射镜、军事制导系统等,这些系统需要定期或不定期地调整以确保机载设备的正常功能。因此,搭载机载设备(可变负载)的平台必须进行精细的校正运动,以消除所有这些误差和不准确之处。这实际上意味着该平台是并联定位机构的末端部分,能够在相应的自由度内实现精细的位置/姿态调整。此类并联定位系统的典型结构如图1所示。

线性运动定位系统的标准配置包括带有位置编码器的电机、无回程间隙高减速比R‐R(旋转到旋转)减速齿轮以及滚珠丝杠R‐L(旋转到线性)传动[4]。具体针对高负载应用,已开发出滚珠和滚柱丝杠机构,并已有商业化产品[1]。在执行器方面,步进电机在机床建筑及其他线性定位系统中使用最为广泛。用于这些应用的控制电子设备和算法也已得到充分发展,并可商业化获得[2, 3]。定位机构的概念、设计和开发,以及线性运动减速器的应用,将在下文进行描述。
2 概念
现有的大多数线性定位系统适用于与所用丝杠直径相关的几个直径范围内的线性运动。根据初步分析,精细校正运动可假设在行程范围2/3毫米内,定位精度在10−2毫米至10−4毫米(更优)范围内。预期轴向力/载荷能力约为104牛。
对于大多数商用滚珠丝杠定位机构而言,小范围线性运动对应于螺杆的小旋转角度。这一事实自然降低了可达到的精度(运动步长增大),并且也导致控制方面的问题。因此,需要一个额外的机械单元来进一步减小线性运动的范围。在考虑建筑可能性、所需性能特性的评估以及现有滚珠丝杠定位机构的参数后,采用了带有附加L‐L(线性到线性)运动减速器的概念,如图2所示。除了L‐L传动单元的功能外,它还能整体提高系统精度。显然,必须采用无回程间隙传动。
以无回程间隙传动方式增大或减小线性运动的任务是微机械学中广泛研究的常见问题。用于此目的的机构通常基于弹性柔性结构,并由压电执行器驱动。这类机构中的广泛类别代表了“运动放大器”。
所提出概念的主要思想是反向使用这种结构;即“作为运动减速器/力放大器”。所提出的减速器原理如图3(a)所示,其中转动关节被弹性连接取代。类似的柔性机构通常采用钻孔和铣削技术,通过在材料上加工双侧切口形式的弹性关节,由一整块弹性材料制成。
求解这种理想化的符合的结构,位移比 $ r_d $ 将为 [5, 10, 12]
$$
r_d = \frac{\Delta y}{\Delta x} = \frac{2 \cdot \Delta y}{L \cdot \sin(\theta)} \left/ \sqrt{1 - \left(1 - \frac{L}{l} \cdot \cos(\theta) + \frac{\Delta x}{2}\right)^2} \right.
\quad \text{(1)}
$$
当位移相对较小时,可以使用以下简单关系(2)[7–9]
$$
r_d = \frac{\Delta y}{\Delta x} = \cot(\theta) \quad \text{(2)}
$$
那么对于力的变换来说,它是
$$
F_x = F_y \cdot r_d \pm S_x \cdot \Delta x \quad \text{(3)}
$$
位移和力比的重要参数包括:$ l $ ‐ 侧臂长度,$ \theta $ ‐ 倾斜角度。角度 $ \theta $ 给出了符合的结构的中性位置。$ \Delta x $、$ \Delta y $ 是从中性位置的实际位移。符号 (±) 取决于侧向运动的方向。$ S_x $ 是柔性部件在受力 $ F_x $ 作用位置和方向上的总刚度。
设计的首要任务是针对给定的传动比和负载,找到柔顺机构几何参数和刚度参数的最佳组合。
3 运动减速器设计
减速器的主要特性由输入位移和作用力的最大值预先决定。期望的输出位移决定了减速比(1)、(2)以及力的传递(3)。在设计任何带有柔性铰链的柔性力学结构时,关键问题是铰链中应力/应变的最大值不能超过允许极限。因此,需要建立模型,并对铰链及整个结构进行细致的柔性分析,包括仿真。
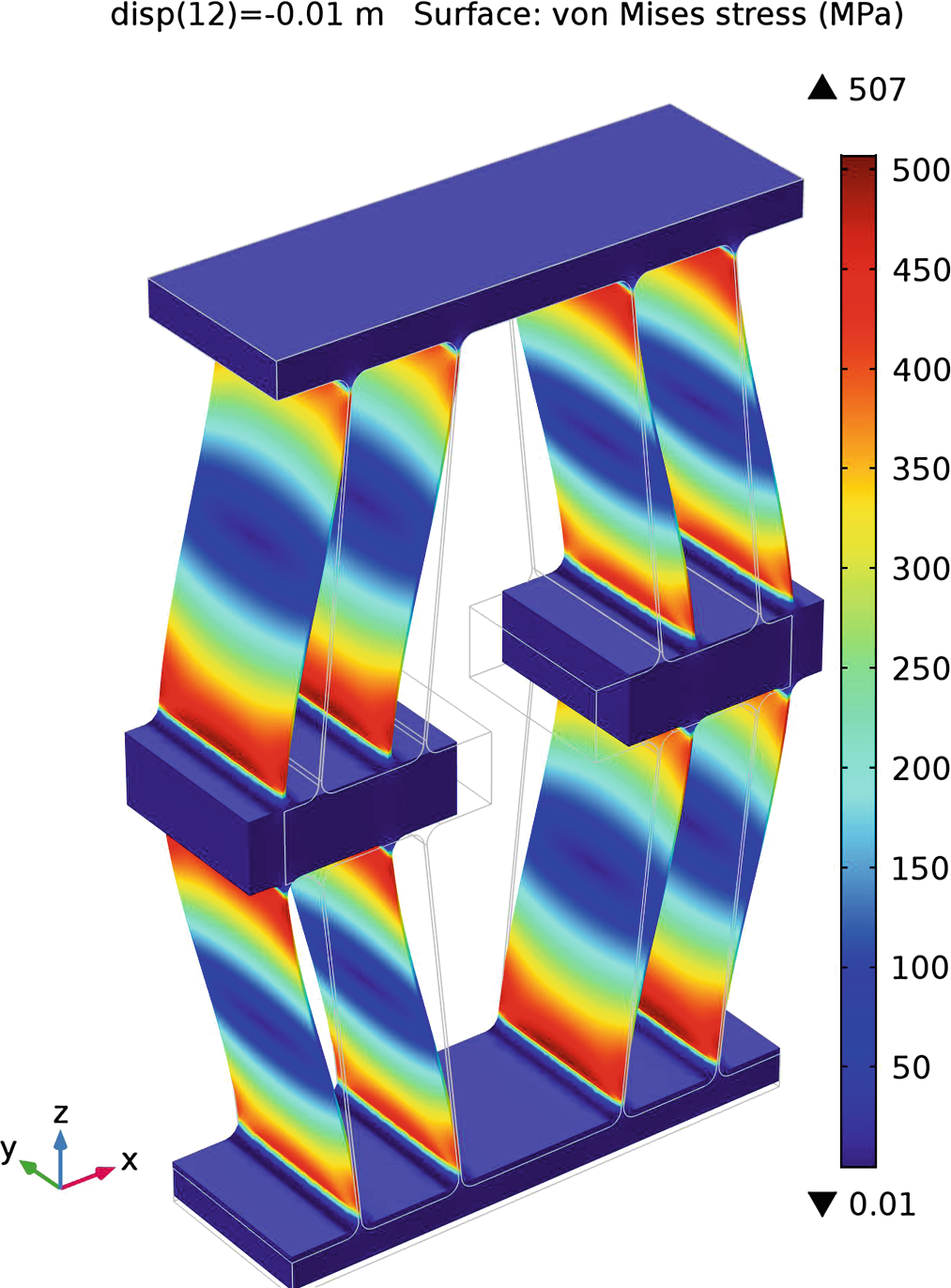
在我们的计算/仿真中考虑了以下输入条件:最大输入位移 $ \Delta x $ = 30 mm,输出位移 $ \Delta y $ = 3 mm(即±1.5 mm),最大负载 5千牛,材料:34CrNiMo6钢,E = 210 GPa,μ = 0.3,ρ = 7850 kg/m³, σ_max = 900 MPa。在第一个设计中,侧臂长度选定为 $ l $ = 100 mm。在此情况下,期望的位移比为 $ r_d = 0.1 $;对应的中心倾斜角 $ \theta $ =84.3 度。
在Comsol Multiphysics中,使用有限元分析对由参数l、θ和各种关节表示的模型进行了多个仿真实验。
如初步计算所示,机械应力主要集中在接头处,并超过了允许值。因此,如果参数 $ l $、$ \theta $ 必须在建筑结构限制范围内,则无法在规定力作用下实现所需的位移。
基于这一经验,提出了柔性机构的替代方案,如图4(a)所示。在此方案中,对于相同的位移,应力/应变沿整个臂长分布。表面应力的仿真结果如图4(b)所示。
 柔性力学, (b) 基本结构)
柔性力学, (b) 基本结构)
几何形状,(b) 应力计算)
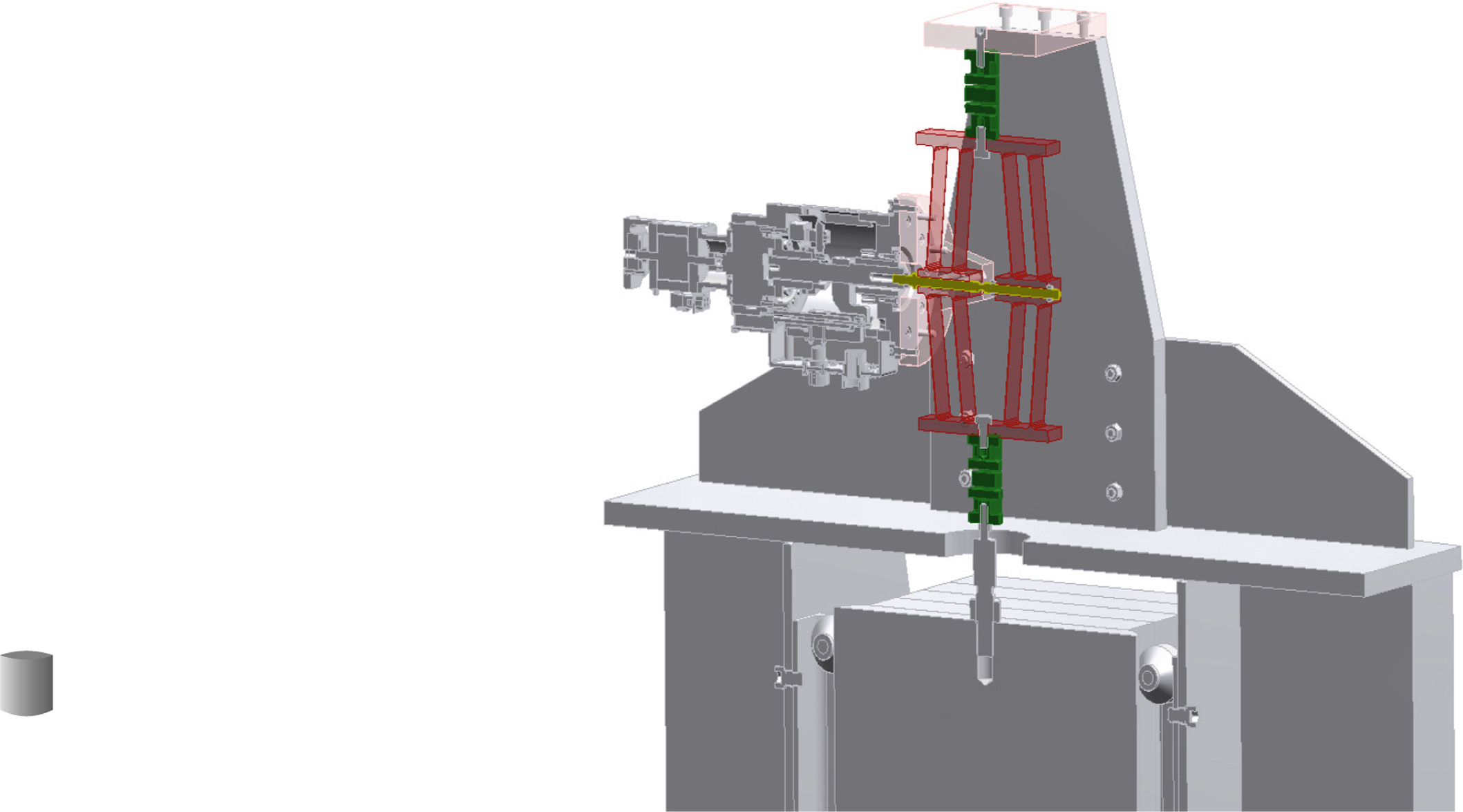
4 实验
为了验证机构的预期性能,已进行了多次测试。为此目的,设计并建造了专用的试验台。测试设备包括以下部分:
- 执行单元由相互集成的装置组成:步进电机、编码器、无回差R‐R高减速比减速器以及带LVDT传感器的滚珠丝杠R‐L机构。理论上计算的对应于电机步距的线性位移为0.266 × 10⁻³ mm。
- 根据上述设计的柔性运动减速器/力放大器。该减速器固定在坚固框架上,并由可变负载加载。通过使用两自由度柔性铰链实现上部(框架)和底部(负载)侧的固定。
- 用于测量负载体位置的激光距离传感装置,分辨率优于10⁻⁴ mm。
- 用于步进电机的复杂控制系统,以及用于处理传感器信号/数据和评估测量结果的软件工具。
所有对实际机构的测量均在具有温度调节的房间内进行。在测量之前,初级定位机构及其控制系统(带滚珠丝杠机构的执行器)已进行校准。
该机构通过加载0、300、600公斤的质量进行测试,并测量了质量体位置。随后,针对特定实验评估了输出运动的参数。类似实验需要专业的计量实验室和设备,因此我们的实验结果可视为初步的。图6显示了在600公斤负载下测量得到的输出数据示例,其中描绘了相对于线性的误差(绝对值和差值),单位为10⁻⁴ mm。
5 结论
本文提出了用于重载/平台精密调整的线性运动机构的概念。该概念基于插入附加无间隙柔性直线机构作为运动减速器[13]。所提出的结构能够减小输入直线位移,从而可利用标准球‐螺杆驱动机构实现小范围运动内的非常精确的校正位移。

















 531
531

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









