






一、动态测试中的核心问题
在电液伺服动态试验中,称重传感器测量的总力 包含两部分:
-
试样真实受力
:需测量的目标值。
-
系统惯性力
:由称重传感器自身、夹具及固定装置的总质量
和其加速度
产生。
此惯性力会引入动态误差(可能占读数的很大比例),需通过物理建模和信号处理消除。
二、动态测量解决方案
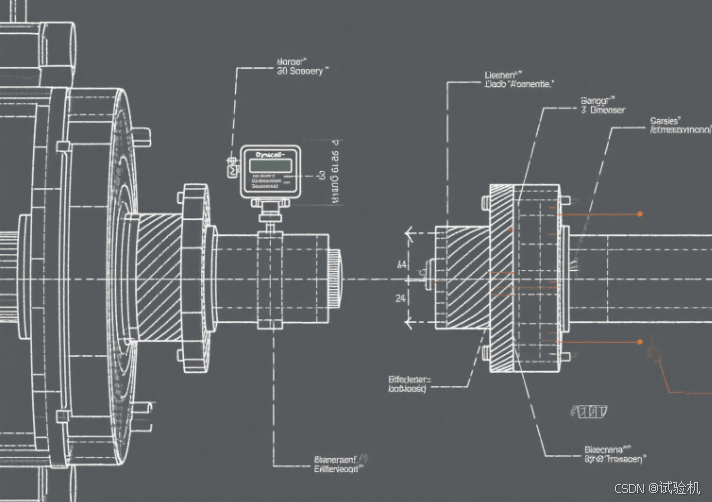
1. 加速度计位置设计
-
负载轴中心安装:加速度计直接位于称重传感器中心,与负载轴线重合。
-
消除偏心误差:
若加速度计偏离负载轴(偏心距离为),测得的加速度会包含线加速度
的耦合项(
),导致相位和幅值误差。
传感器设计确保,仅测量纯线加速度
2. 原理公式推导
-
牛顿第二定律:系统总力为真实力与惯性力之和:
-
动态校正公式:从总力中扣除惯性力分量,得到真实力:
关键参数:
-
-
-
三、信号处理与操作实现
1. 自动校正流程
-
加速度信号集成:加速度计信号由试验机控制器实时处理。
-
系统调谐:在自动调谐阶段,控制器完成以下步骤:
-
标定总质量 mm(通过已知激励响应)。
-
同步采集
和
-
动态计算
。
耗时 <1分钟,且操作一致性高,减少人为误差。
-
2. 手动模式
-
用户可选项:关闭自动校正,手动输入
-
应用场景:针对特殊工况或用户自定义参数需求。
四、技术优势总结
| 设计特性 | 解决的问题 | 实际效果 |
|---|---|---|
| 负载轴中心加速度计 | 偏心误差(幅值/相位失真) | 测量纯线加速度,信号无畸变 |
| 自动调谐算法 | 操作员设置差异及耗时 | 一键完成,设置时间<1分钟 |
| 动态惯性力补偿公式 | 高频测试中惯性力占比过大 | 真实力误差降低,支持更高测试频率 |
| 手动/自动模式切换 | 特殊工况适应性不足 | 灵活满足不同用户需求 |
五、应用效果
-
动态误差减少:公式
-
频率提升:传统传感器因相位滞后限制频率,力传感器通过中心加速度计实现信号同步,允许频率加倍操作。
-
生产效率:更高测试频率 + 快速自动设置 → 缩短测试周期,提升产能。
六、公式的物理意义扩展
若考虑多自由度运动(如横向振动),需引入加速度矢量分解:
其中 为负载轴方向单位向量。传感器通过单轴精密对齐,将问题简化为标量计算,避免多维耦合复杂度。


















 697
697

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









