




 本文详细介绍了张正友相机标定方法,包括计算外参、内参、最大似然估计和径向畸变估计的原理与步骤。通过对棋盘格图像的拍摄和处理,求解摄像机的内参矩阵、旋转和平移向量以及畸变系数,实现精确的相机参数标定。
本文详细介绍了张正友相机标定方法,包括计算外参、内参、最大似然估计和径向畸变估计的原理与步骤。通过对棋盘格图像的拍摄和处理,求解摄像机的内参矩阵、旋转和平移向量以及畸变系数,实现精确的相机参数标定。
一、实验原理
1.计算外参
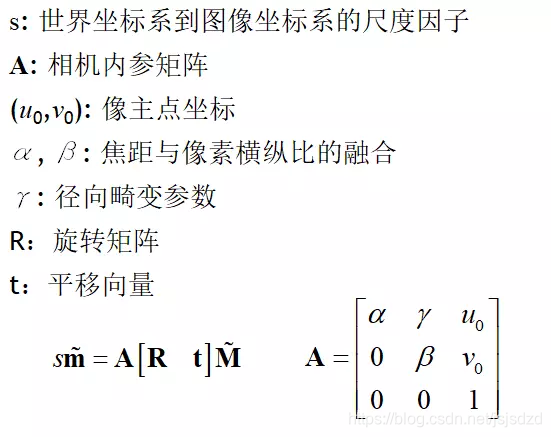
设三维世界坐标的点为M=[X,Y,Z,1]T,二维相机平面像素坐标为m=[u,v,1]T,所以标定用的棋盘格平面到图像平面的单应性关系为: sm=A[R,t]M
其中
不妨设棋盘格位于Z = 0,定义旋转矩阵R的第i列为 ri, 则有:
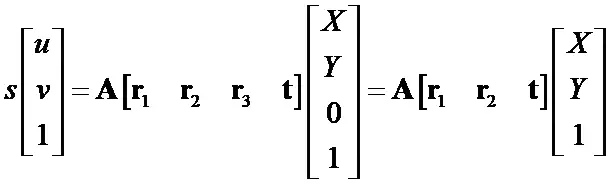
令H=[h1 h2 h3]=λA[r1 r2 t]
于是空间到图像的映射可改为: sm=HM,
其中H是描述Homographic矩阵,H是一个齐次矩阵,所以有8个未知数,至少需要8个方程,每对对应点能提供两个方程,所以至少需要四个对应点,就可以算出世界平面到图像平面的单应性矩阵H

外参具体计算公式。注意:R3是 t
一般而言,求解出的R = [r1 r2 t] 不会满足正交与归一的标准
在实际操作中,R 可以通过SVD分解实现规范化(详见原文)
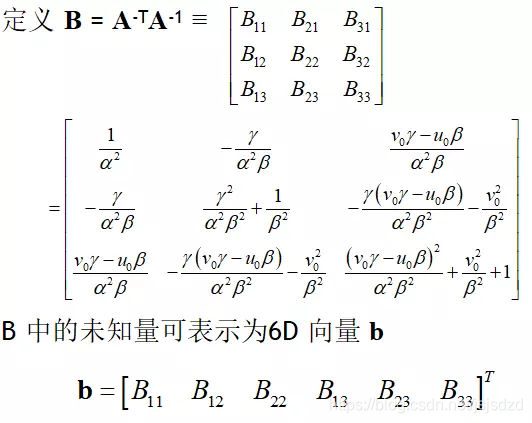
2.计算内参
由r1和r2正交,且r1和r2的模相等,可以得到如下约束:
正交
模相等
可以推到出
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 480
480

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









