



电机的正反转是电机运行中非常重要的一个概念,它决定了电机的旋转方向。在实际应用中,我们经常需要通过改变电机的接线方式来实现电机的正反转。那么,为什么任意调换两相接线,电机就会反转呢?本文将从电机的基本原理出发,详细解析这个问题。
首先,我们需要了解电机的基本构造和工作原理。电机主要由定子和转子两部分组成。定子是电机的固定部分,通常由铁芯和绕组组成;转子是电机的旋转部分,通常由铁芯和绕组组成。当电流通过定子的绕组时,会在绕组周围产生磁场。根据电磁感应定律,转子中的导体会受到磁场的作用而产生电动势,进而产生电流。这个电流与磁场相互作用,产生转矩,使转子旋转。
电机的旋转方向取决于定子绕组产生的磁场方向和转子导体中的电流方向。当两者相互吸引时,电机正转;当两者相互排斥时,电机反转。因此,要实现电机的正反转,只需改变定子绕组产生的磁场方向或转子导体中的电流方向即可。
接下来,我们来分析如何通过调换两相接线来实现电机的反转。在三相电机中,有三相绕组,分别为A相、B相和C相。三相绕组可以连接成星形(Y型)或三角形(Δ型)。在星形连接中,三个绕组的一端分别连接到电源的三个相线上,另一端共同连接到中性点;在三角形连接中,三个绕组首尾相连,形成一个闭合回路。
当电机采用星形连接时,我们可以任意调换两相接线来实现电机的反转。具体操作如下:
1.将电源的A相和B相互换:此时,定子绕组产生的磁场方向发生了变化,从原来的顺时针变为逆时针。由于转子导体中的电流方向保持不变,所以磁场和电流之间的相互作用关系发生了改变,从原来的相互吸引变为相互排斥。这样,电机就实现了反转。
2.将电源的B相和C相互换:同样地,定子绕组产生的磁场方向发生了变化,从原来的顺时针变为逆时针。由于转子导体中的电流方向保持不变,所以磁场和电流之间的相互作用关系发生了改变,从原来的相互吸引变为相互排斥。这样,电机就实现了反转。
3.当电机采用三角形连接时,我们不能直接调换两相接线来实现电机的反转。因为三角形连接中,三个绕组首尾相连,形成一个闭合回路。如果随意调换两相接线,会导致电路短路,损坏电机。但是,我们可以通过改变其中一相绕组的首尾端位置来实现电机的反转。具体操作如下:
将A相绕组的首端与B相绕组的末端相连,将A相绕组的末端与C相绕组的首端相连:此时,定子绕组产生的磁场方向发生了变化,从原来的顺时针变为逆时针。由于转子导体中的电流方向保持不变,所以磁场和电流之间的相互作用关系发生了改变,从原来的相互吸引变为相互排斥。这样,电机就实现了反转。
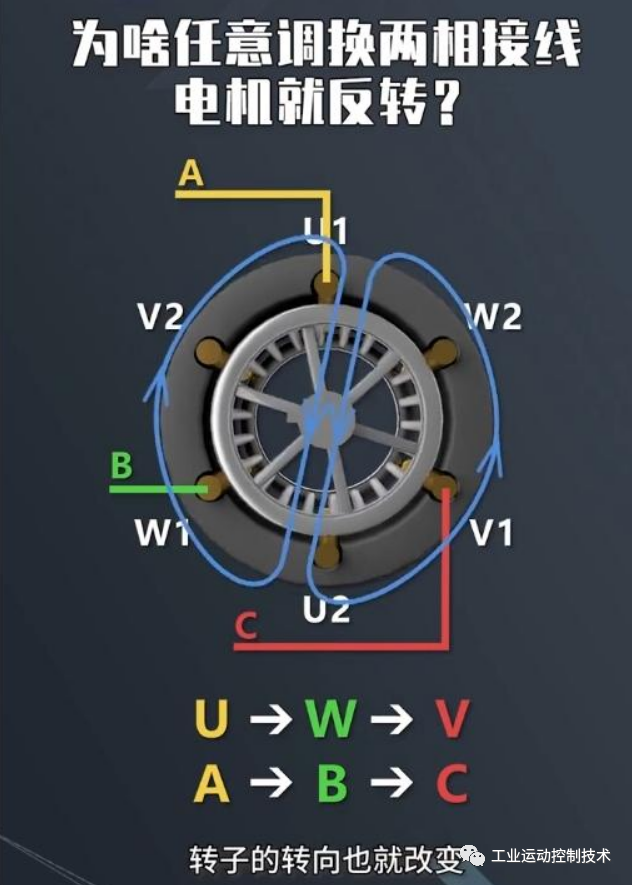
总之,通过任意调换两相接线,我们可以实现三相电机的反转。这是因为调换两相接线会改变定子绕组产生的磁场方向或转子导体中的电流方向,从而改变磁场和电流之间的相互作用关系,实现电机的反转。需要注意的是,在三角形连接中,我们不能直接调换两相接线来实现电机的反转,而需要通过改变其中一相绕组的首尾端位置来实现。


















 3574
3574



 到【灌水乐园】发言
到【灌水乐园】发言







