




 该代码示例展示了如何使用open3d库读取点云数据,清除已有法线信息,重新估计点云的法线,并通过可视化展示点云及其法线。首先从BunnyMesh数据中采样点,然后清除点云的法线数据,接着调用estimate_normals()函数计算新法线,并在两次可视化中显示了原始点云和带有法线的点云。
该代码示例展示了如何使用open3d库读取点云数据,清除已有法线信息,重新估计点云的法线,并通过可视化展示点云及其法线。首先从BunnyMesh数据中采样点,然后清除点云的法线数据,接着调用estimate_normals()函数计算新法线,并在两次可视化中显示了原始点云和带有法线的点云。
法线计算:
pcd.estimate_normals()
法线可视化:
o3d.visualization.draw_geometries([pcd], point_show_normal=True)
法线查看:
print(np.asarray(pcd.normals))
point_cloud_normal_estimation.py
import open3d as o3d
import numpy as np
if __name__ == "__main__":
# 1. read pcd
bunny = o3d.data.BunnyMesh()
gt_mesh = o3d.io.read_triangle_mesh(bunny.path)
gt_mesh.compute_vertex_normals()
pcd = gt_mesh.sample_points_poisson_disk(5000)
# Invalidate existing normals. 因为要求法线,而该数据是有法线数据的,所以需要归0
pcd.normals = o3d.utility.Vector3dVector(np.zeros((1, 3)))
print("Displaying input pointcloud ...")
o3d.visualization.draw_geometries([pcd], point_show_normal=True)
# 2. estimate_normals
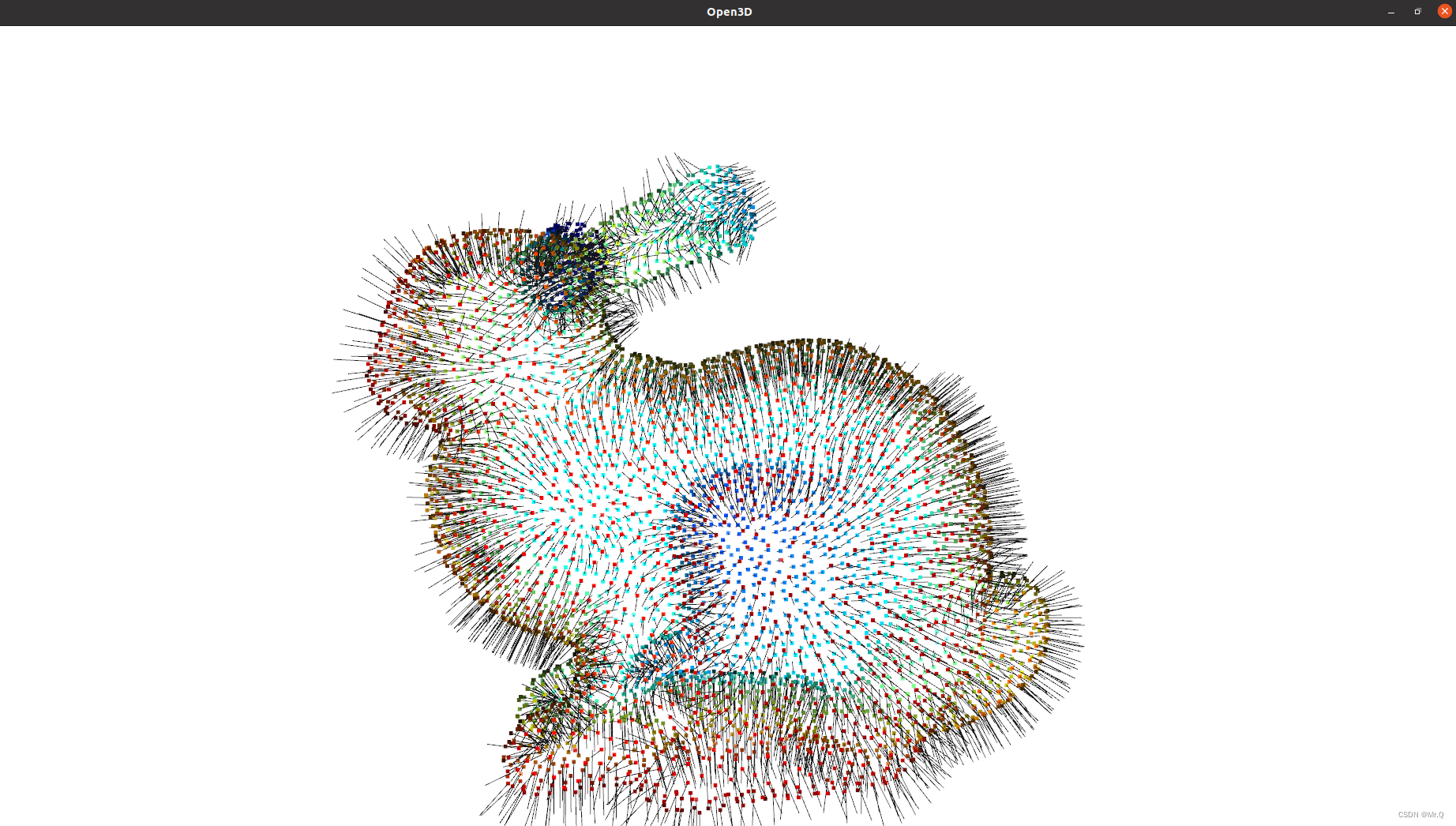
pcd.estimate_normals()
print("Displaying pointcloud with normals ...")
o3d.visualization.draw_geometries([pcd], point_show_normal=True)
print("Printing the normal vectors ...")
print(np.asarray(pcd.normals))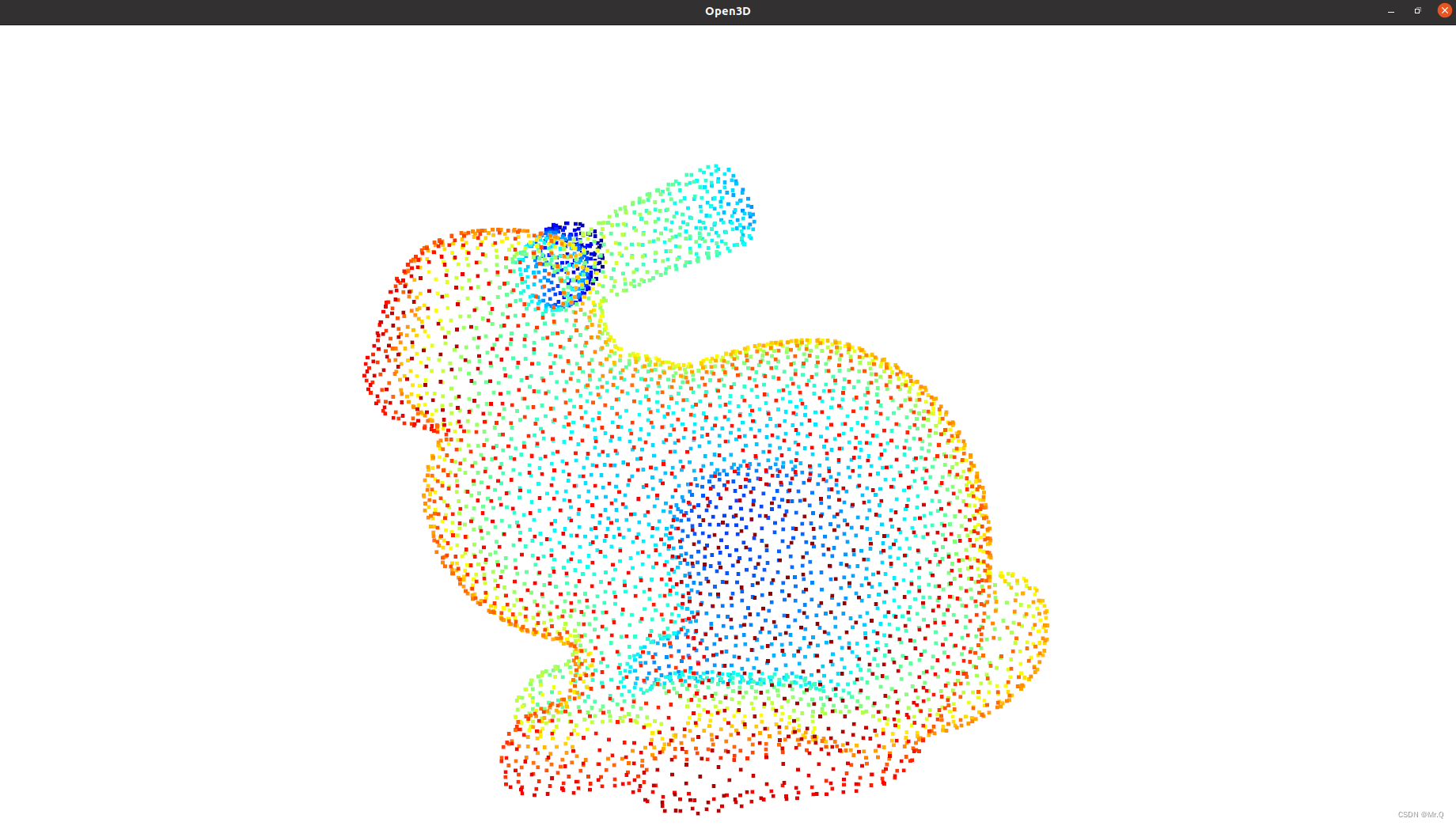



















 5642
5642

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











