




 模板匹配是图像处理中用于查找特定内容的技术,涉及灰度匹配(SAD,SSD)、相关性匹配(NCC)、基于形状的匹配和基于描述符的匹配。这些方法各有优缺点,例如NCC对光照变化和小遮挡适应性强,但对大位移、旋转或缩放较敏感;形状匹配适用于边缘特征明显的情况,但不适用于大旋转或缩放;基于描述符的方法适合有纹理图像。
模板匹配是图像处理中用于查找特定内容的技术,涉及灰度匹配(SAD,SSD)、相关性匹配(NCC)、基于形状的匹配和基于描述符的匹配。这些方法各有优缺点,例如NCC对光照变化和小遮挡适应性强,但对大位移、旋转或缩放较敏感;形状匹配适用于边缘特征明显的情况,但不适用于大旋转或缩放;基于描述符的方法适合有纹理图像。
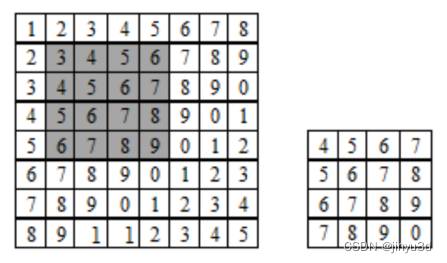
模板匹配常用于在一幅图像中寻找特定内容的任务中。由于模板图像的尺寸小于待匹配图像的尺寸,同时又需要比较两张图像中的每一个像素的灰度值,因此常采用在待匹配图像中选择与模板相同尺寸的滑动窗口,通过比较滑动窗口与模板的相似程度,判断待匹配图像中是否含有与模板图像相同的内容。
1.基于灰度的模板匹配
基于灰度匹配的原理是计算模板图像与检测图像之间的像素灰度差值的绝对值综总和(SAD方法)或者平方差总和(SSD方法)。
首先选择一块ROI(感兴趣区域)作为模板图像,生成基于灰度值的模板;然后将检测图像与模板图像进行粗匹配,在检测图像与模板图像中任选一点,采取隔点搜索的方式计算二者灰度的相似性,这样粗匹配一遍得到粗相关点;接下来进行精匹配,将得到的粗相关点作为中心点,用最小二乘法寻找二者之间的最优匹配点。
2.相关性的模板匹配
NCC是一种基于统计学计算两组样本数据相关性的算法,其取值范围为[-1, 1]之间,而对图像来说,每个像素点都可以看出是RGB数值,这样整幅图像就可以看成是一个样本数据的集合,如果它有一个子集与另外一个样本数据相互匹配则它的ncc值为1,表示相关性很高,如果是-1则表示完全不相关,基于这个原
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1462
1462




 到【灌水乐园】发言
到【灌水乐园】发言







