



 镜头畸变主要表现为桶形和枕形,由透镜的物理属性造成,导致图像边缘挤压或拉伸。畸变程度随远离光轴增加而加剧,可用泰勒级数展开描述,如k1、k2参数。切向畸变源于透镜与传感器平面的不平行,常由安装偏差引起,用p1、p2参数描述。线性畸变则在拍摄直线结构时显现。
镜头畸变主要表现为桶形和枕形,由透镜的物理属性造成,导致图像边缘挤压或拉伸。畸变程度随远离光轴增加而加剧,可用泰勒级数展开描述,如k1、k2参数。切向畸变源于透镜与传感器平面的不平行,常由安装偏差引起,用p1、p2参数描述。线性畸变则在拍摄直线结构时显现。
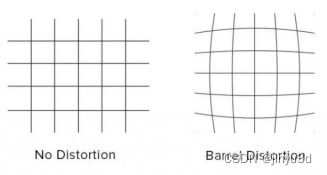
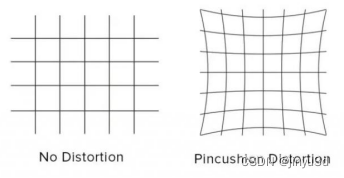
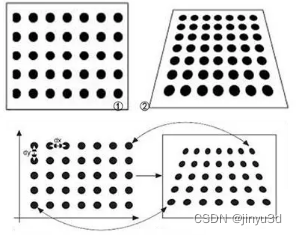
镜头畸变,实际上就是光学透镜所具有的透视失真属性,也正是由于镜头的透视造成了失真。通常失真会造成图像边缘产生挤压或拉伸的结果,当边缘向外拉伸时,我们称之为桶形畸变 ;当边缘向内挤压时,称之为枕形畸变。在失真的情况下,会造成越往边缘失真越严重,越往中心变形越小的现象。由于无法判断原有物体的实际形状,因此失真效果对于后期制作是非常不利的。这个是透镜的固有属性( 凸透镜汇聚光线、凹透镜发散光线)。
桶形畸变(桶形失真)是由于镜头中透镜物理性能及镜片组结构使成像画面产生桶形膨胀状的失真效果。
枕形畸变(枕形失真)是由距离光学轴线的远近来决定的。我们在使用长焦镜头或使用变焦镜头的长焦端时,较容易产生枕形畸变效果。
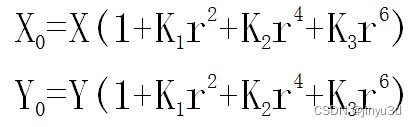
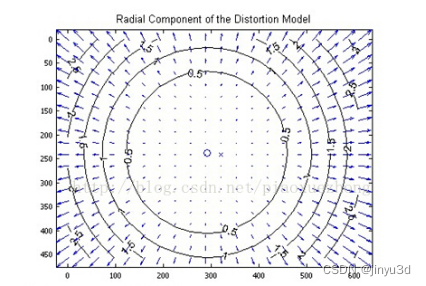
成像仪光轴中心的畸变为0,沿着镜头半径方向向边缘移动,畸变越来越严重。畸变的数学模型可以用主点(principle point)周围的泰勒级数展开式的前几项进行描述,通常使用前两项,即k1和k2,对于畸变很大的镜头,如鱼眼镜头,可以增加使用第三项k3来进行描述,成像仪上某点根据其在径向方向上的分布位置,调节公式为:
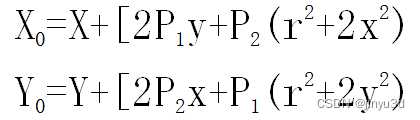
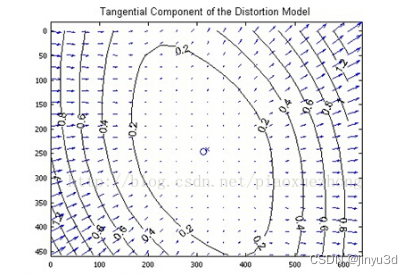
切向畸变是由于透镜本身与相机传感器平面(成像平面)或图像平面不平行而产生的,这种情况多是由于透镜被粘贴到镜头模组上的安装偏差导致。畸变模型可以用两个额外的参数p1和p2来描述:
线性畸变是当试图近距离拍摄高大的直线结构,实际上平行的线条显得并不平行了,这种失真现象被称为线性畸变。

















 8511
8511




 到【灌水乐园】发言
到【灌水乐园】发言







