




正文
激光雷达的原理
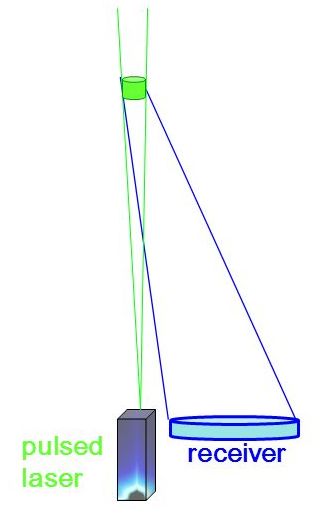
如下图所示,激光雷达的发射器发射出一束激光,激光光束遇到物体后,经过漫反射,返回至激光接收器,雷达模块根据发送和接收信号的时间间隔乘以光速,再除以2,即可计算出发射器与物体的距离。
图片出处:http://slideplayer.com/slide/7103535/
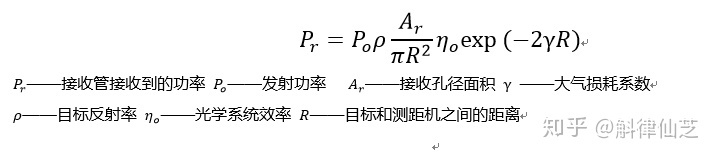
自动驾驶用的LiDAR通过测量激光束在空中的飞行时间(从发射窗口发射,照射到目标,再反射回接收窗口所需要的时间),乘以光速,得到测距仪到目标的距离。因此,激光探测属于既需要发射又需要接受的主动探测。这种模式下,探测距离和能接收到的返回激光的能量有关。雷达方程可以完美表述这一过程(看看就好):
有一点比较蛋疼。我们都知道,激光的波束很窄;目标还都不是反射镜;所以在车载环境下,我们要靠目标的一点点漫反射来获取距离信息。
那激光具体是怎么反射回来的呢?
首先,光源发出的光束,经过发射透镜组准直后从发射窗射出。发射透镜组反射、吸收、畸变损耗了一部分能量。
其次,反射光束在空气中和空气分子、尘埃等发生作用,绝大部分被散射,一部分被吸收。所以为什么激光雷达怕雾霾、雨雪,因为还没达到目标,能量已经被散射的差不多了。
再次,光束照射到目标表面后,一部分被目标吸收,剩余的以漫反射(不是镜面反射)的方式反射到四面八方,只有很小的一部分可以原路返回回去。
最终,反射光能有幸最终抵达接收窗口,汇聚后又只有一部分能落到接收传感器的敏感区域。(问题,它怎么知道哪些是它发射的光呢?它有可能接收到一系列的漫反射的光信息,怎么过滤出它自己发射出去的光呢?是不是频率?在探测器前面还有一个过滤器,只允许波长相近的电磁波通过,同时阻挡其他电磁波。对于相同波长的多个雷达,可能存在接错数据源的问题,还存在同一个物体的反射波经过多个路径后被接收的情况,这些都会对测距的结果产生影响,具体的应对措施可以看https://zhuanlan.zhihu.com/p/326421564)
看一个例子,对于发射功率50W,使用直径20mm的透镜接受的测距仪:
- 当目标5m远,目标反射率为80%(白色漫反射目标)时, 0.15mw的功率能最终返回。 <
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6519
6519




 到【灌水乐园】发言
到【灌水乐园】发言







