




前言
本文档的目的仅为协助客户了解A121雷达中的Distance detector,仅概括说明重要步骤和参数的含义及目的。很遗憾原厂没有公开distance detector包含的算法c源码,故此文档中谈及算法的部分仅用作辅助客户了解用法,请勿以此作为算法开发指导。
概述
A121 的distance detector的目的是检测静止物体到雷达的距离。Distance detector以sparse IQ的原始输出为基础,集成了算法处理,具有各种配置参数接口,可以根据不同的应用和场景适配参数以获得更好的效果。
关键步骤介绍
Distance detector用到了以下四个关键步骤
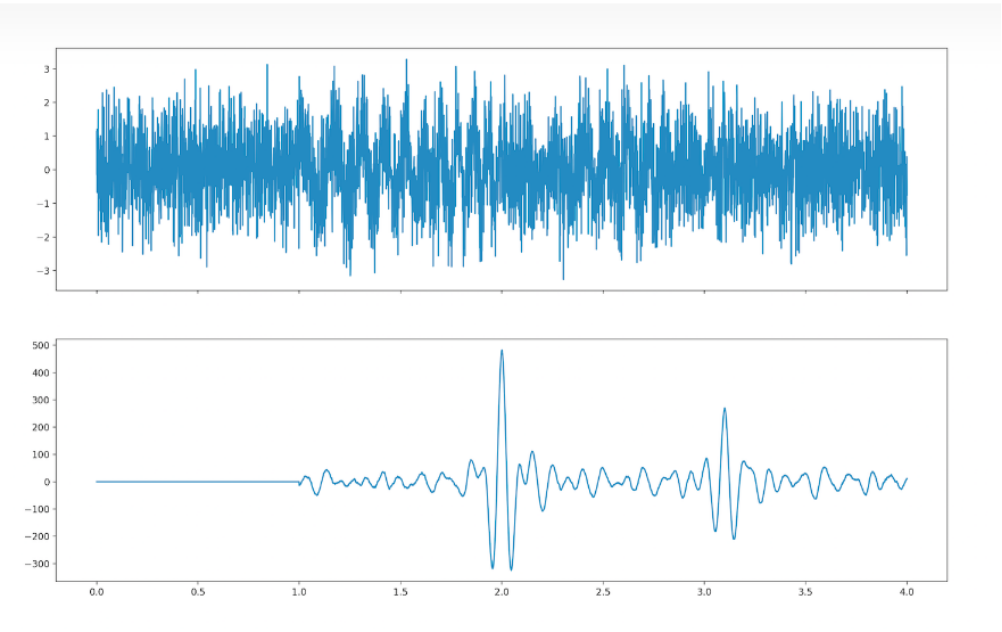
**1、距离滤波器:**在距离维度上采用了匹配滤波器(matched filter),提高信号质量,抑制噪声。
2、子扫描(subsweeps):将测量范围分成多个子扫描,每个子扫描配置不同的参数使得整个测量范围内的信噪比基本相等,同时最大限度降低功耗。
比如:设定检测范围为0.25~3.0m.那么在distance detector中会自动分配为四个子扫描(subsweeps)。配合下图中上位机的图形显示,更易理解。
Subweep1: 0.12~0.98m profile=1 HWAAS=2
Subsweep2:0.3~2.3m profile=3 HWAAS=5
Subsweep3:0.66~2.4m profile=5 HWAAS=7
Subsweep4: 2.46~3.9m profile=5 HWAAS=15
然后再整合分析这些subsweep,最终得到目标距离。在A111的distance detector中,无法使用subsweep,只能在测量范围内整体扫描一次,即一个参数应用于整个距离范围。那么如果想测量较近距离的目标,尽量缩小盲区泄露,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 599
599

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









