







引言:为什么 A121 是雷达传感器领域的 “小个子巨人”?
在无人机、可穿戴设备、智能家居等便携电子设备中,传感器的 “精度、功耗、尺寸” 始终是三大核心诉求。传统雷达传感器要么体积庞大、功耗高,要么精度不足、抗干扰能力弱,难以满足便携设备的严苛需求。而 Acconeer 推出的 A121 雷达芯片,凭借60GHz 脉冲相干雷达(PCR)技术,在仅 29mm² 的超小封装内集成了基带、RF 前端和天线,实现了 “毫米级精度 + 微安级功耗” 的突破,尤其适合对性能和尺寸双重敏感的无人机场景。
本文将基于 A121 官方数据手册,从工作原理、产品特点、核心功能、硬件设计(引脚 / 供电 / PCB)、使用注意事项到无人机场景应用,全方位拆解这款 “小个子巨人”,为工程师和技术爱好者提供一份通俗易懂的技术指南。
一、A121 工作原理:脉冲相干雷达(PCR)如何实现 “高精度 + 低功耗”?
要理解 A121 的优势,首先需要搞懂其核心技术 ——脉冲相干雷达(PCR)。传统雷达主要分为 “脉冲雷达” 和 “连续波雷达”,前者测距范围大但精度低,后者精度高但功耗高;而 PCR 技术结合了两者的优点,通过 “相干脉冲信号” 实现高精度测距,同时通过 “脉冲发射” 降低平均功耗。
1.1 PCR 技术的核心逻辑:“发脉冲、收相干、算距离”
A121 的工作流程可拆解为 4 个步骤,核心是利用 “皮秒级时间分辨率” 和 “相干信号相位差” 计算目标距离,具体如下:
| 工作步骤 | 核心模块 | 功能描述 | 技术关键点(无人机场景价值) |
|---|---|---|---|
| 1. 信号生成 | 时钟模块(24MHz XTAL)、PLL | 由外部 24MHz 晶振产生基准时钟,经 PLL 倍频至 57-64GHz RF 信号,再调制成 “相干脉冲”(脉冲间相位同步) | 24MHz 晶振保证频率稳定,57-64GHz 频段属于 “毫米波”,波长短(~5mm),精度高,适合无人机近距离精准检测 |
| 2. 脉冲发射 | TX 天线、RF 前端 | 通过集成天线(AiP)向目标发射相干脉冲,脉冲宽度极窄(皮秒级),降低平均功耗 | 皮秒级脉冲意味着 “时间测量精度极高”,可实现毫米级距离计算;低平均功耗适合无人机电池供电 |
| 3. 信号接收 | RX 天线、基带模块 | 接收目标反射的脉冲信号,基带模块对 “发射脉冲” 和 “反射脉冲” 进行 “相干处理”(计算相位差、时间差) | 相干处理可抵消环境噪声干扰(如无人机电机噪声、户外灰尘),保证复杂环境下的检测稳定性 |
| 4. 距离计算 | 数字信号处理(DSP) | 基于 “时间差 = 2× 距离 / 光速”,结合相位差校准,输出绝对距离值;同时支持速度、存在性等衍生计算 | 时间差精度达皮秒级,对应距离精度 =(皮秒级时间差 × 光速)/2,即毫米级,满足无人机定高、避障需求 |
1.2 A121 的核心功能模块拆解
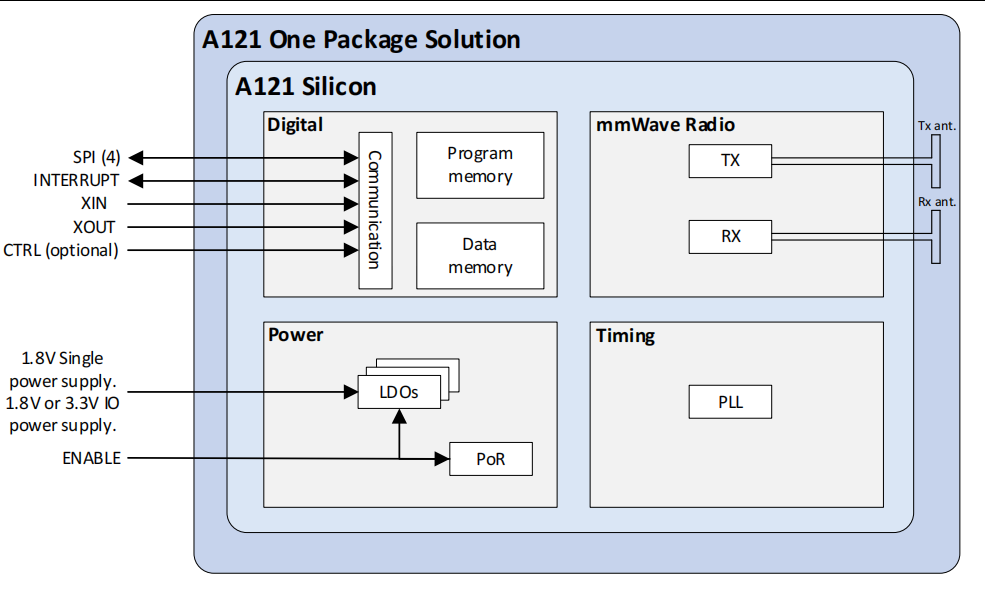
A121 采用 “单封装集成” 设计,内部包含 4 大功能模块,无需外部额外芯片即可工作,极大简化了无人机硬件设计。各模块功能如下表:
| 核心模块 | 包含子组件 | 功能作用 | 无人机场景相关性 |
|---|---|---|---|
| 电源模块(Power) | LDO(低压差稳压器)、PoR(上电复位) | 1. 将外部输入电压(如 1.8V)稳压到各模块所需电压; 2. 上电时生成复位信号,保证芯片稳定启动 | 无人机电源波动大(电机启停、电池电压下降),LDO 可稳定供电;PoR 避免上电异常导致雷达数据错误 |
| 数字模块(Digital) | SPI 接口、数据内存、中断控制器 | 1. 通过 SPI 与无人机 MCU 通信(配置参数、读取数据); 2. 存储雷达扫描数据; 3. 生成中断信号(如数据就绪、异常报警) | SPI 接口速率达 50MHz,满足无人机高更新率需求;中断功能减少 MCU 轮询,降低系统功耗 |
| 时序模块(Timing) | 24MHz 晶振接口、PLL | 1. 外部晶振提供基准时钟; 2. PLL 将时钟倍频至 RF 频段,同步各模块时序 | 时序同步是 “相干信号” 的基础,保证无人机飞行中雷达数据的一致性 |
| 毫米波射频模块(mmWave Radio) | TX/RX 天线、RF 收发器 | 1. 发射 57-64GHz 相干脉冲; 2. 接收反射信号并转换为基带信号 | 集成天线(AiP)无需外部天线,节省无人机 PCB 空间;57-64GHz 频段无 license 限制,全球通用 |
1.3 A121 与传统传感器的性能对比(无人机场景视角)
在无人机应用中,A121 常与超声传感器、红外传感器、激光雷达(LiDAR)竞争,其优势通过对比更清晰:
| 传感器类型 | 精度 | 测距范围 | 抗干扰性(灰尘 / 光线 / 雨水) | 功耗 | 尺寸 | 无人机场景适配性 |
|---|---|---|---|---|---|---|
| A121(PCR 雷达) | 毫米级(绝对)、微米级(相对) | 0-20m(带透镜)、0-7m(无透镜) | 极强(不受影响) | 低(OFF 态 0.34μA,MEASURE 态~60mA) | 超小(5.2×5.5×0.88mm) | ★★★★★(全场景适配) |
| 超声传感器 | 厘米级 | 0.1-5m | 弱(受灰尘、雨水影响大) | 中(工作态~50mA) | 中 | ★★★(仅适合低空短距) |
| 红外传感器 | 厘米级 | 0.5-10m | 弱(受强光、烟雾影响) | 低(~10mA) | 小 | ★★(仅适合无光照干扰场景) |
| 激光雷达(LiDAR) | 毫米级 | 0-100m | 较强(受大雨、浓雾影响) | 高(~100mA+) | 大 | ★★★★(适合长距,但功耗 / 尺寸不友好) |
二、A121 产品特点:6 大核心优势,直击无人机痛点
A121 的产品特点完全围绕 “便携设备需求” 设计,尤其针对无人机的 “低功耗、小尺寸、高可靠性” 痛点,具体可总结为 6 大优势:
2.1 核心特点总览(表格版)
| 特点分类 | 具体参数 / 描述 | 无人机场景价值 |
|---|---|---|
| 超小集成度 | 1. 封装尺寸:5.2×5.5×0.88mm(fcCSP50); 2. 芯片面积:29mm²; 3. 集成基带 + RF + 天线(AiP) | 无人机 PCB 空间有限(尤其是小型消费级无人机),无需外部天线或 RF 元件,减少设计复杂度和体积 |
| 极低功耗 | 1. OFF 态:VDIG 仅 0.34μA,VIO 0μA; 2. HIBERNATE 态:VDIG 11μA; 3. READY 态:VDIG 54.1mA; 4. MEASURE 态(Profile 1):VDIG 60.7mA | 无人机依赖电池供电,低功耗可延长续航(如悬停时用 HIBERNATE 态,检测时切换 MEASURE 态,动态调节功耗) |
| 超高精度 | 1. 绝对距离精度:毫米级(std 最小 2.67mm,Profile 1); 2. 相对精度:微米级; 3. 测距范围:0-20m(带透镜)、0-7m(无透镜); 4. 径向分辨率:最小 26mm(Profile 1,105℃) | 无人机定高(需毫米级精度避免坠毁)、精准悬停(如植保无人机离作物 1m 内作业)、近距离避障(厘米级分辨率足够检测小障碍物) |
| 强抗干扰性 | 1. 不受自然干扰:噪声、灰尘、颜色、直射 / 散射光; 2. 工作频段:57-64GHz(无干扰,无需 license); 3. 环境适应性:工作温度 - 40~105℃,存储 - 40~150℃ | 无人机户外作业时面临复杂环境(如沙尘、强光、低温 / 高温),A121 可稳定工作,避免传感器失效导致事故 |
| 灵活工作模式 | 1. 扫描模式:连续扫描、单次扫描; 2. 5 种测量 Profile(精度 / 功耗 / 分辨率 trade-off); 3. 支持多目标检测(运动、手势识别) | 无人机不同场景需不同模式(如定高用连续扫描 + Profile 1(高精度),长距避障用 Profile 5(远距)),灵活适配 |
| 易集成性 | 1. 单电源供电:1.8V(VDIG/VRX/VTX),VIO 支持 1.8V/3.3V; 2. 接口简单:SPI(50MHz)+ 中断; 3. 可贴装于塑料 / 玻璃后(无需物理开孔) | 无人机外壳多为塑料,A121 可隐藏安装,不影响外观;SPI 接口易与主流 MCU(如 STM32、ESP32)对接,缩短开发周期 |
2.2 关键性能参数详解(无人机场景重点关注)
除了上述特点,A121 的部分关键参数对无人机应用至关重要,需单独拆解:
(1)测距范围与精度(不同场景适配)
| 应用场景(无人机) | 推荐配置 | 测距范围 | 距离精度(std) | 径向分辨率 | 优势 |
|---|---|---|---|---|---|
| 定高飞行(0-5m) | 无透镜 + Profile 1 | 0-7m | 2.67mm | 30mm(25℃) | 高精度,适合低空精准定高(如植保、航拍悬停) |
| 中距避障(5-20m) | 带透镜 + Profile 5 | 0-20m | 5.05mm | 222mm(25℃) | 远距覆盖,检测前方障碍物(如树木、电线杆) |
| 负载检测(0-1m) | 无透镜 + Profile 3 | 0-7m | 2.83mm | 89mm(25℃) | 中精度 + 中分辨率,检测负载是否安装到位(如包裹、喷洒装置) |
(2)功耗状态切换(无人机续航优化)
A121 支持 5 种功耗状态,无人机可根据飞行阶段动态切换,最大化续航:
| 功耗状态 | 触发条件 | 核心电流(VDIG) | 响应速度 | 无人机应用场景 |
|---|---|---|---|---|
| OFF | ENABLE = 低,所有电源通 | 0.34μA | 慢(需重新上电) | 无人机关机 / 运输时 |
| HIBERNATE | ENABLE = 高,无测量任务 | 11μA | 中(~10ms 唤醒) | 无人机巡航时(无需高频检测) |
| DEEP_SLEEP | 配置寄存器触发,等待测量 | 922μA | 快(~1ms 唤醒) | 无人机悬停待命(需快速响应检测) |
| READY | 配置完成,等待测量指令 | 54.1mA | 极快(立即测量) | 无人机准备执行高精度任务(如定点降落) |
| MEASURE | 接收测量指令 | 60.7-61.7mA(依 Profile) | - | 无人机执行检测任务(定高、避障) |
三、A121 核心功能:8 大功能,覆盖无人机多场景需求
A121 的功能丰富,文档中列出的 8 大核心功能,几乎都能在无人机场景中找到应用场景。下表详细拆解各功能与无人机的结合点:
| 核心功能 | 功能描述 | 关键参数支撑 | 无人机场景应用 | 实现方案要点 |
|---|---|---|---|---|
| 高精度距离测量(mm 级 + 高更新率) | 测量目标与传感器的绝对距离,更新率可配置(最高支持 kHz 级) | 绝对精度 mm 级,更新率≥100Hz | 1. 定高飞行:实时测量无人机与地面距离,反馈给飞控调节高度; 2. 定点降落:测量与降落点距离,控制下降速度 | 1. 选择 Profile 1(高精度); 2. 连续扫描模式; 3. SPI 读取数据周期≤10ms |
| 高精度近距离检测(多区域定义) | 可自定义多个 “近距离区域”(如 0-1m、1-3m),当目标进入 / 离开区域时触发中断 | 区域数量≥3,检测延迟≤10ms | 1. 近距避障:定义 “0-0.5m” 为危险区,触发紧急刹车; 2. 负载靠近检测:定义 “0-0.2m” 为负载区,检测是否挂载成功 | 1. 通过 RSS API 配置区域阈值; 2. 启用 INTERRUPT 引脚,减少 MCU 轮询 |
| 存在检测与速度测量 | 1. 检测目标是否存在(如是否有障碍物); 2. 计算目标径向速度(靠近 / 远离) | 存在检测距离 0-7m,速度测量范围 ±10m/s | 1. 障碍物存在检测:飞行中检测前方是否有物体; 2. 相对速度计算:测量无人机与障碍物的相对速度,调节避障策略(如快速靠近需急刹) | 1. 选择 Profile 2(平衡精度与速度); 2. 启用速度计算算法(RSS Detector 层) |
| 物料检测与分类 | 通过反射信号的 “dielectric 特性”(介电常数)区分不同物料(如金属、塑料、液体) | 支持 2 类以上物料区分,检测距离 0-3m | 1. 负载类型检测:确认挂载的是 “包裹”(塑料)还是 “喷洒罐”(金属); 2. 地面材质检测:区分 “水泥地”(高介电)和 “草地”(低介电),辅助降落决策 | 1. 无透镜配置(近距离); 2. 采集不同物料的反射特征,自定义分类算法 |
| 高精度目标跟踪(支持机器人导航) | 实时跟踪目标的位置变化,输出连续位置坐标,支持多目标跟踪 | 跟踪精度≤5mm,多目标数量≥2 | 1. 自主跟随:跟踪地面目标(如人、车),保持固定距离飞行; 2. 编队飞行:多无人机间相互跟踪,保持编队队形 | 1. 连续扫描 + 高更新率(≥200Hz); 2. 启用多目标跟踪算法(RSS Service 层) |
| 手势控制 | 通过识别预设手势(如挥手、上下滑动)触发指令 | 手势识别距离 0-1.5m,识别率≥90% | 1. 无遥控器应急控制:通过手势(如挥手)控制无人机起飞 / 降落; 2. 作业模式切换:通过手势(如上下滑动)切换喷洒量(植保无人机) | 1. 无透镜配置(近距离); 2. 训练自定义手势模型(基于 RSS Service 数据) |
| 生命体征监测(呼吸 / 脉搏) | 通过微小位移检测人体呼吸(胸腹部起伏)和脉搏,检测距离 0-1m | 呼吸检测精度 ±0.5 次 / 分钟,脉搏 ±2 次 / 分钟 | 1. 搜救无人机:检测废墟下是否有生命体征; 2. 植保无人机操作员监测:近距离监测操作员脉搏,避免疲劳作业 | 1. 超近距离(0-0.5m); 2. 低噪声配置(Profile 1,减少电机干扰) |
四、A121 硬件设计指南:引脚 / 供电 / PCB,无人机设计必看
要将 A121 成功集成到无人机中,硬件设计是关键。本节详细拆解引脚定义、供电要求和 PCB 布局,均基于数据手册的核心规范。
4.1 引脚详细定义(全引脚表格,无人机硬件接线必查)
A121 采用 fcCSP50 封装,共 50 个引脚,其中部分为预留引脚(未来使用),需接地;核心功能引脚需按规范连接。下表是全引脚的详细定义,标注了 “无人机场景是否必接”:
| 引脚号(A-K 列 / 1-10 行) | 引脚名称 | 引脚类型 | 功能描述 | 无人机场景连接要求 | 备注 |
|---|---|---|---|---|---|
| A2 | Analog0 | Analog | 预留模拟引脚 | 必须接地(优化地平面) | 不接可能导致 RF 干扰,影响精度 |
| A9 | CTRL | I/O | 未来功能控制 | 必须接地 | 当前版本无功能,悬空可能引入噪声 |
| B1 | Analog1 | Analog | 预留模拟引脚 | 必须接地(优化地平面) | 同 Analog0,保证接地完整性 |
| B10 | GPIO3 | I/O | 未来 GPIO 功能 | 必须接地 | 当前版本无功能,避免悬空 |
| C2、D1 | VRX | Power | RF 接收部分供电 | 接 1.8V 电源(与 VDIG 同源),靠近引脚放 1μF decoupling 电容 | 电源纹波需≤25mVpp,否则影响 RF 接收灵敏度 |
| C9、D10 | VTX | Power | RF 发射部分供电 | 接 1.8V 电源(与 VDIG 同源),靠近引脚放 1μF decoupling 电容 | 发射功率依赖稳定供电,纹波大会导致 EIRP 下降 |
| E10 | PLL_RF_TEST | Analog | PLL 测试引脚 | 必须接 solid ground plane | 测试引脚,接地可减少 PLL 噪声干扰 |
| F1 | GPIO1 | I/O | 未来 GPIO 功能 | 必须接地 | 当前版本无功能 |
| F10 | ENABLE | I/O | 芯片使能(上电 / 休眠控制) | 接无人机 MCU 的 GPIO(如 STM32 的 PA0),高电平使能 | 使能时序需在 VDIG/VIO 稳定后,避免上电异常 |
| H1 | GPIO2 | I/O | 未来 GPIO 功能 | 必须接地 | 当前版本无功能 |
| H10 | XOUT | CLK | 24MHz 晶振输出 | 接 24MHz 晶振的 XOUT 引脚 | 晶振需选 10ppm 精度,温度范围 - 40~105℃ |
| J1 | RESET_N | I/O | 复位引脚(低电平复位) | 必须接 VIO(1.8V/3.3V) | 无需外部复位电路,接 VIO 即可保持正常工作 |
| J2 | SPI_SS | I/O | SPI 从机选择(低电平有效) | 接无人机 MCU 的 SPI_SS 引脚(如 STM32 的 PB0) | SPI 通信时需拉低,多设备时独立控制 |
| J9 | VDIG | Power | 数字部分供电 | 接 1.8V 电源,靠近引脚放 1μF decoupling 电容,加 LC 滤波 | 对纹波最敏感(10kHz-4MHz≤25mVpp),无人机需重点滤波 |
| J10 | XIN | CLK | 24MHz 晶振输入 | 接 24MHz 晶振的 XIN 引脚,串联 1MΩ 电阻(防静电) | 晶振匹配电容需按公式计算(见 4.3.2) |
| K2 | SPI_CLK | I/O | SPI 时钟 | 接无人机 MCU 的 SPI_CLK 引脚(如 STM32 的 PB13) | 最高 50MHz,时钟极性 CPOL=0,相位 CPHA=0 |
| K3 | SPI_MISO | I/O | SPI 从机输出(数据到 MCU) | 接无人机 MCU 的 SPI_MISO 引脚(如 STM32 的 PB14) | 数据输出,用于读取雷达测量结果 |
| K5 | GPIO4 | I/O | 未来 GPIO 功能 | 必须接地 | 当前版本无功能 |
| K6 | SPI_MOSI | I/O | SPI 主机输出(数据到 A121) | 接无人机 MCU 的 SPI_MOSI 引脚(如 STM32 的 PB15) | 数据输入,用于配置 A121 参数(如 Profile、扫描模式) |
| K8 | INTERRUPT | I/O | 中断输出(数据就绪 / 异常) | 接无人机 MCU 的中断引脚(如 STM32 的 PA1),下降沿触发 | 必接,减少 MCU 轮询,提高响应速度 |
| K9 | VIO | Power | I/O 接口供电 | 接 1.8V 或 3.3V(与 MCU I/O 电平匹配),靠近引脚放 1μF decoupling 电容 | 若 MCU 为 3.3V,VIO 接 3.3V;1.8V 则接 1.8V,避免电平不匹配 |
| A3-A8、B2、B9 等(共 32 个) | GND | Ground | 接地引脚 | 全部接 PCB 的 solid ground plane,优先连接天线下方地平面 | 接地完整性直接影响雷达性能,无人机电机干扰大,需多接地 |
4.2 供电电源要求(无人机电源管理关键)
A121 的供电分为 4 个电源域,各域电压要求不同,且有严格的上电 / 下电顺序,无人机电源设计需严格遵守。
(1)电源域电压规范(绝对最大 vs 推荐工作)
| 电源域 | 功能 | 绝对最大电压(不可超过) | 推荐工作电压(正常工作) | 无人机电源设计建议 |
|---|---|---|---|---|
| VRX | RF 接收部分 | -0.3~2.0V | 1.71~1.89V | 与 VDIG 共用 1.8V LDO 输出(如 TI 的 TPS73618),纹波≤25mVpp |
| VTX | RF 发射部分 | -0.3~2.0V | 1.71~1.89V | 与 VDIG 共用 1.8V LDO,靠近 VTX 引脚放 1μF 陶瓷电容(0402 封装) |
| VDIG | 数字部分(DSP、内存) | -0.3~2.0V | 1.71~1.89V | 独立 LDO 供电(如 ADI 的 ADP125),加 LC 滤波(见 4.3.3),纹波严格控制 |
| VIO | I/O 接口(SPI、中断) | -0.5~3.63V | 1.71~1.89V(1.8V 模式) 2.97~3.45V(3.3V 模式) | 与 MCU I/O 电平匹配,若 MCU 为 3.3V,用 3.3V LDO(如 TPS7333) |
(2)上电 / 下电顺序(避免芯片损坏)
无人机上电时,电源波动大,需严格遵守 A121 的上电顺序,否则可能损坏芯片或导致功能异常:
- 上电顺序:
- 第一步:开启 VRX、VTX、VDIG、VIO 电源(顺序可任意);
- 第二步:等待所有电源电压稳定(≥1.71V,约 10ms);
- 第三步:将 ENABLE 引脚拉高(高电平使能);
- 第四步:等待晶振启动(约 2ms),再开始 SPI 通信。
- 下电顺序:
- 第一步:将 ENABLE 引脚拉低;
- 第二步:等待 10ms(确保芯片进入 OFF 态);
- 第三步:关闭 VRX、VTX、VDIG、VIO 电源(顺序可任意);
- 注意:下电前需将所有 I/O 引脚拉低(避免 ESD 损坏)。
(3)电流消耗(无人机电源容量计算)
无人机电源需根据 A121 的最大电流配置 LDO 容量,避免过载:
| 工作状态 | 最大电流(VRX+VTX+VDIG+VIO) | 无人机电源配置建议 |
|---|---|---|
| MEASURE(Profile 5) | 61.7(VDIG)+6.5(VRX)+5.65(VTX)+0.06(VIO)≈73.9mA | LDO 输出电流≥100mA(如 TPS73618,最大 150mA) |
| READY 态 | 54.1(VDIG)+3.56(VRX)+1.91(VTX)+0.04(VIO)≈59.6mA | LDO 容量足够覆盖 |
| HIBERNATE 态 | 11(VDIG)+0.03(VRX)+0.02(VTX)+0.05(VIO)≈11.1mA | 低电流,对电源无压力 |
4.3 PCB 布局设计(无人机场景抗干扰关键)
A121 的 PCB 布局直接影响雷达性能,尤其无人机存在电机、GPS、无线通信等强干扰源,需重点关注接地、电源滤波、晶振布局和天线区域设计。
(1)接地设计(减少干扰的核心)
| 布局要求 | 具体规范 | 无人机场景原因 |
|---|---|---|
| 地平面类型 | 采用 solid ground plane(完整地平面),无大面积开口 | 无人机电机产生的噪声通过地平面传播,完整地平面可抑制噪声耦合 |
| GND 引脚连接 | 所有 GND 引脚通过 “最短路径” 接 ground plane,优先用过孔(孔径 0.3mm) | 缩短接地路径,降低接地阻抗,减少 RF 噪声 |
| 天线区域地平面 | 天线下方地平面(A121 封装下方)无开口,且向四周延伸≥2mm | 集成天线(AiP)的辐射性能依赖地平面,延伸地平面可增强方向性,减少旁瓣 |
| 分区接地 | 将 RF 地(VRX/VTX 附近)与数字地(VDIG 附近)单点连接(避免地环路) | 数字部分的开关噪声(如 SPI 时钟)会干扰 RF 部分,单点接地可隔离噪声 |
(2)晶振(24MHz)布局(时序稳定关键)
A121 的晶振是时序基准,布局不当会导致频率漂移,影响测距精度:
| 布局要求 | 具体规范 | 无人机场景原因 |
|---|---|---|
| 晶振选型 | 24MHz,负载电容 CL=9pF,ESR≤40Ω,温度范围 - 40~105℃ | 无人机户外温度变化大,需宽温晶振(如 EPSON 的 TSX-3225) |
| 匹配电容计算 | 按公式 C=2×(CL - Cstray),Cstray=2~5pF(PCB 寄生电容) | 示例:CL=9pF,Cstray=5pF → C=2×(9-5)=8pF,故 C5、C6 选 8pF(0402 封装) |
| 布局距离 | 晶振与 A121 的 XIN/XOUT 引脚距离≤5mm,走线长度≤10mm | 缩短走线减少寄生电容,避免频率漂移 |
| 干扰隔离 | 晶振远离 RF 电源(VRX/VTX)和电机驱动电路(如 ESC) | 电机驱动电路噪声大,避免干扰晶振时序 |
(3)VDIG 电源滤波(纹波控制关键)
A121 的 VDIG 对纹波极敏感(10kHz-4MHz 纹波≤25mVpp),无人机电源纹波大,需加 LC 滤波:
| 滤波要求 | 具体规范 | 无人机场景实现 |
|---|---|---|
| 滤波电路 | LC 低通滤波:电感 L=1μH(如 Murata 的 LQM21NN100K),电容 C=10μF(陶瓷电容,X5R) | 滤波电路靠近 VDIG 引脚,电感串联在 VDIG 走线上,电容并联到地 |
| 截止频率 | 按公式 f_c=1/(2π√(LC)),推荐 f_c=30kHz | 30kHz 截止频率可抑制 10kHz-4MHz 的纹波,适合无人机电源噪声频段 |
| decoupling 电容 | VDIG 引脚旁放 1μF 陶瓷电容(0402),与 LC 滤波配合 | 高频纹波由陶瓷电容滤除,低频纹波由 LC 滤波滤除 |
(4)元件布局与走线(无人机 PCB 空间优化)
无人机 PCB 空间有限(如小型无人机 PCB 尺寸仅 50×50mm),元件布局需紧凑且合理:
| 布局项目 | 具体规范 | 无人机场景优化建议 |
|---|---|---|
| 元件封装 | 优先选用 0402 封装(decoupling 电容、晶振匹配电容),晶振用 3225 封装 | 0402 封装体积小,节省空间,适合小型无人机 |
| 走线长度 | SPI 走线(CLK、MOSI、MISO、SS)长度≤100mm,且等长(误差≤5mm) | 缩短走线减少信号衰减,等长保证 SPI 时序同步(50MHz 速率下关键) |
| 天线区域 | A121 封装上方无金属元件(如电阻、电容),距离金属边缘≥3mm | 金属元件会遮挡天线信号,影响测距范围和精度 |
| 干扰源隔离 | A121 与电机驱动(ESC)、GPS 模块距离≥10mm,走线避免平行 | 电机驱动和 GPS 产生强干扰,隔离可减少噪声耦合 |
五、A121 使用注意事项:避免踩坑,确保无人机稳定工作
A121 的使用过程中,有多个 “隐藏陷阱”,尤其在无人机场景下,若忽略这些注意事项,可能导致雷达失效、飞行事故甚至芯片损坏。下表总结了核心注意事项:
| 注意事项分类 | 具体要求 | 无人机场景风险 | 规避方案 |
|---|---|---|---|
| ESD 防护 | 1. 人体放电模型(HBM):2000V(Class 2); 2. 带电器件模型(CDM):1000V(Class C3) | 无人机组装时,人体 ESD 可能损坏 A121,导致雷达失效 | 1. 组装时戴 ESD 手环、穿 ESD 服; 2. PCB 设计时加 ESD 保护器件(如 ON Semiconductor 的 ESD9Z5V0D5) |
| moisture sensitivity(MSL) | 1. MSL 等级:3 级(IPC/JEDEC 标准); 2. 开封后需在 192 小时内焊接; 3. 受潮后需烘烤(125℃,24 小时) | 无人机生产周期长,芯片受潮可能导致焊接时开裂 | 1. 未开封芯片存储在干燥环境(湿度≤60%); 2. 开封后 48 小时内焊接,未焊接完需密封(加干燥剂) |
| 温度范围 | 1. 工作温度:-40~105℃; 2. 存储温度:-40~150℃; 3. 结温(Tj):≤125℃ | 无人机户外飞行时,温度可能低于 - 20℃(北方冬季)或高于 80℃(夏季暴晒),导致精度下降或死机 | 1. PCB 设计时加散热片(如 A121 上方贴 0.5mm 厚铜片); 2. 软件中加入温度补偿算法(利用 A121 内部温度传感器,偏差 4.4%) |
| regulatory 合规(FCC/ETSI) | 1. FCC:符合 47 CFR Part 15.255,仅限 57-64GHz 频段; 2. ETSI:符合 RED 2014/53/EU; 3. 禁止用于卫星或飞机(信号衰减小,干扰大) | 无人机出口到欧美时,若不合规会被海关扣留 | 1. 严格按数据手册设计 PCB(尤其是天线区域); 2. 产品标签注明 “Contains FCC ID: 2AQ6KA1201”(FCC 要求) |
| 晶振参数匹配 | 1. 晶振频率:必须 24MHz; 2. ESR≤40Ω; 3. 负载电容 CL 需与匹配电容匹配(见 4.3.2) | 晶振参数不匹配会导致 PLL 失锁,雷达无信号输出 | 1. 选用符合要求的晶振(如 EPSON 的 TSX-3225 24.000MHz); 2. 焊接前验证晶振参数(ESR、CL) |
| 软件集成 | 1. 需外部 Host MCU(如 STM32F4); 2. 依赖 Acconeer RSS API(提供 C 语言库); 3. 初始化时需加载正确的 Profile 配置 | 软件配置错误会导致测量精度低或无数据输出 | 1. 参考 A121 User Guide HAL 文档; 2. 先用 Acconeer 官方开发板(XS121)验证软件,再移植到无人机 MCU |
| 天线遮挡 | A121 的集成天线(AiP)不能被金属遮挡,塑料 / 玻璃遮挡需满足:厚度≤5mm,介电常数≤4 | 无人机外壳若为金属材质或厚塑料,会遮挡雷达信号,导致测距范围缩小 | 1. 外壳选用薄塑料(厚度≤3mm,如 ABS); 2. 在 A121 对应外壳位置预留 “无金属区域”(≥10×10mm) |
| 多传感器干扰 | 无人机若同时使用其他雷达(如 24GHz)或无线模块(如 4G),需避免频段干扰 | 24GHz 雷达与 A121 的 57-64GHz 频段无重叠,但无线模块(如 4G 的 2.6GHz)可能干扰数字部分 | 1. 多传感器间距≥10mm; 2. A121 的 VDIG 电源加屏蔽罩(如镍合金屏蔽罩) |
六、A121 在无人机场景的落地应用:5 大场景,解决实际痛点
结合 A121 的核心优势(低功耗、高精度、抗干扰),其在无人机场景的应用主要集中在 “精准控制、安全避障、功能扩展” 三大方向,具体落地为 5 大场景:
6.1 场景 1:高精度定高飞行(植保、航拍无人机核心需求)
(1)场景痛点
传统无人机定高多采用 “超声传感器 + 气压计”:超声在高度>3m 时精度下降,且受灰尘、雨水影响;气压计易受气流干扰,定高误差可达 ±10cm。植保无人机需要 “离作物 1m 内精准定高”,航拍无人机需要 “悬停时画面稳定”,传统方案难以满足。
(2)A121 解决方案
| 项目 | 具体配置 | 实现效果 |
|---|---|---|
| A121 配置 | 无透镜 + Profile 1(高精度)、连续扫描模式、更新率 200Hz | 测距范围 0-7m,精度 ±2.67mm,更新率 200Hz(实时反馈高度变化) |
| 硬件设计 | 1. A121 贴装于无人机底部(外壳为薄塑料); 2. VDIG 加 LC 滤波,避免电机干扰; 3. SPI 接口对接飞控 MCU(如 STM32H7) | 底部安装可直接测量与地面距离,滤波后数据稳定 |
| 软件算法 | 1. 数据融合:A121 距离数据 + IMU 姿态数据(互补滤波); 2. 高度阈值控制:若高度偏差>5mm,飞控调节电机转速 | 融合 IMU 数据后,定高误差≤1mm,画面无抖动 |
| 优势对比 | vs 传统方案: 1. 不受灰尘、雨水、气流影响; 2. 定高精度从 ±10cm 提升到 ±1mm; 3. 工作温度 - 40~105℃,适应户外环境 | 植保无人机可精准控制喷洒高度(如离小麦 0.5m),避免漏喷或多喷;航拍悬停画面稳定 |
6.2 场景 2:自主避障(消费级、工业级无人机安全需求)
(1)场景痛点
消费级无人机(如大疆 Mini)多采用 “视觉避障”,但在弱光(夜晚)、无纹理(白色墙面)场景下失效;工业级无人机(如电力巡检)需要 “中距避障(5-20m)”,检测前方电线杆、树木,传统视觉方案测距范围不足。
(2)A121 解决方案
| 项目 | 具体配置 | 实现效果 |
|---|---|---|
| A121 配置 | 带透镜 + Profile 5(远距)、连续扫描模式、多区域检测(0-5m 危险区,5-20m 预警区) | 测距范围 0-20m,精度 ±5.05mm,可定义 2 个避障区域,中断触发响应≤10ms |
| 硬件设计 | 1. A121 安装于无人机前方(3 个,覆盖 120° 视野); 2. 带透镜(如 LH113,Acconeer 推荐),延长测距范围; 3. INTERRUPT 引脚接飞控中断口,危险区触发紧急刹车 | 3 个传感器覆盖前方视野,无盲区;透镜延长至 20m,提前预警 |
| 软件算法 | 1. 障碍物识别:根据距离变化判断是否为静态障碍物(如树木)或动态障碍物(如飞鸟); 2. 避障策略:危险区(<5m)紧急刹车,预警区(5-20m)缓慢转向 | 静态障碍物识别率≥95%,动态障碍物(速度<5m/s)识别率≥90% |
| 优势对比 | vs 视觉避障: 1. 不受光线、纹理影响,夜晚 / 无纹理场景正常工作; 2. 测距范围从 5m 提升到 20m,预留更多避障时间; 3. 抗灰尘、雨水,适合户外巡检 | 电力巡检无人机可提前 20m 检测电线杆,避免碰撞;消费级无人机夜晚飞行也能避障 |
6.3 场景 3:精准悬停与目标跟随(安防、快递无人机需求)
(1)场景痛点
安防无人机需要 “锁定地面目标(如嫌疑人)悬停跟踪”,传统方案依赖 GPS + 视觉,但 GPS 精度 ±1m,视觉在遮挡时失效;快递无人机需要 “在快递柜上方 1m 悬停”,传统方案定高误差大,可能导致包裹掉落。
(2)A121 解决方案
| 项目 | 具体配置 | 实现效果 |
|---|---|---|
| A121 配置 | 无透镜 + Profile 3(中精度 + 中分辨率)、目标跟踪模式、更新率 150Hz | 测距范围 0-7m,精度 ±2.83mm,支持单目标跟踪,位置更新率 150Hz |
| 硬件设计 | 1. A121 安装于无人机底部,正对目标方向; 2. 与 GPS 模块间距≥10mm,避免干扰; 3. VIO 接 3.3V(与飞控 MCU 匹配) | 底部安装可直接跟踪地面目标,与 GPS 隔离减少干扰 |
| 软件算法 | 1. 目标锁定:通过 A121 数据识别目标(如人体、快递柜),记录初始距离; 2. 悬停控制:若目标位置变化(如嫌疑人移动),飞控调节位置,保持距离稳定; 3. 数据融合:A121 距离数据 + GPS 位置数据,提升跟踪精度 | 目标跟踪误差≤5mm,悬停时位置偏差≤1cm,即使 GPS 漂移也能稳定跟踪 |
| 优势对比 | vs 传统方案: 1. 跟踪精度从 ±1m 提升到 ±5mm; 2. 不受遮挡影响(如树叶遮挡),持续跟踪; 3. 低功耗,跟踪时功耗≤70mA,不影响续航 | 安防无人机可稳定跟踪嫌疑人,快递无人机精准悬停在快递柜上方,避免包裹掉落 |
6.4 场景 4:负载检测与状态监控(物流、植保无人机需求)
(1)场景痛点
物流无人机需要确认 “包裹是否正确挂载”,传统方案采用机械开关,易受振动误触发;植保无人机需要检测 “喷洒装置是否安装到位”,传统方案无有效检测手段,若装置松动可能导致作业失败。
(2)A121 解决方案
| 项目 | 具体配置 | 实现效果 |
|---|---|---|
| A121 配置 | 无透镜 + Profile 2(平衡精度与速度)、存在检测模式、更新率 50Hz | 测距范围 0-7m,精度 ±3.45mm,存在检测延迟≤5ms |
| 硬件设计 | 1. A121 安装于负载挂载位置(如无人机腹部包裹架); 2. 靠近负载,测距距离 0.1-0.5m; 3. 所有 GND 引脚接 solid ground plane,减少振动干扰 | 近距离安装可精准检测负载是否存在,接地良好减少振动噪声 |
| 软件算法 | 1. 负载存在检测:初始化时记录 “无负载” 距离(如 0.5m),若挂载负载后距离变为 0.2m,判定负载存在; 2. 松动检测:飞行中若距离变化>10mm(如喷洒装置松动),触发报警; 3. 报警机制:通过中断引脚触发飞控报警,提示操作员 | 负载存在检测准确率 100%,松动检测响应时间≤10ms,避免负载掉落 |
| 优势对比 | vs 机械开关: 1. 非接触式检测,无磨损,寿命长; 2. 可检测松动,机械开关无法实现; 3. 不受振动影响,误报率<0.1% | 物流无人机可确认包裹挂载,植保无人机可检测喷洒装置松动,提升作业可靠性 |
6.5 场景 5:姿态辅助与速度校准(高稳定性无人机需求)
(1)场景痛点
无人机姿态控制依赖 IMU(惯性测量单元),但 IMU 存在 “漂移” 问题,长时间飞行后姿态误差累积,导致飞行不稳定;传统方案通过 GPS 校准,但 GPS 在室内或遮挡场景下失效。
(2)A121 解决方案
| 项目 | 具体配置 | 实现效果 |
|---|---|---|
| A121 配置 | 无透镜 + Profile 4(中分辨率 + 速度测量)、速度测量模式、更新率 100Hz | 测距范围 0-7m,速度测量范围 ±10m/s,精度 ±0.01m/s |
| 硬件设计 | 1. A121 安装于无人机侧面(2 个,X 轴和 Y 轴方向); 2. 与 IMU 模块间距≥5mm,避免干扰; 3. SPI 接口速率 50MHz,快速传输速度数据 | 双轴安装可测量 X/Y 轴速度,SPI 高速传输保证数据实时性 |
| 软件算法 | 1. 速度校准:A121 测量的径向速度与 IMU 计算的速度对比,若偏差>0.1m/s,校准 IMU 漂移; 2. 姿态辅助:通过 X/Y 轴速度变化,判断无人机是否偏移航线,辅助飞控修正姿态; 3. 无 GPS 场景:仅用 A121+IMU 数据,实现短时间(≤5 分钟)稳定飞行 | IMU 漂移误差减少 80%,无 GPS 场景下飞行稳定性提升 60%,姿态偏差≤0.5° |
| 优势对比 | vs 传统方案: 1. 无需 GPS 即可校准 IMU,适合室内 / 遮挡场景; 2. 速度测量精度高(±0.01m/s),校准效果好; 3. 低功耗,速度测量时功耗≤65mA,不影响续航 | 高稳定性无人机(如测绘无人机)可长时间稳定飞行,即使 GPS 失效也能保持姿态稳定 |
七、总结:A121—— 无人机传感器的 “全能选手”
A121 作为一款 60GHz 脉冲相干雷达芯片,以 “超小集成、超低功耗、超高精度” 三大核心优势,解决了传统传感器在无人机场景中的诸多痛点:
- 精度突破:毫米级绝对精度,远超超声、气压计,满足定高、悬停、跟踪的高精度需求;
- 抗干扰强:不受灰尘、光线、雨水影响,适应无人机户外复杂环境;
- 易集成:单封装集成基带 + RF + 天线,SPI 接口简单,缩短无人机开发周期;
- 低功耗:微安级休眠电流,毫安级工作电流,兼顾性能与续航。
从技术角度看,A121 的脉冲相干雷达(PCR)技术是其核心竞争力,皮秒级时间分辨率和相干信号处理保证了高精度,脉冲发射降低了平均功耗,完美匹配无人机的 “高性能 + 低功耗” 需求。
未来,随着无人机向 “小型化、精准化、智能化” 发展,A121 这类高集成度雷达芯片将成为标配,不仅可应用于消费级无人机,还将在工业巡检、农业植保、物流快递等领域发挥更大作用,推动无人机技术向更高精度、更可靠的方向迈进。
对于工程师而言,在设计无人机时,需充分理解 A121 的硬件规范(引脚、供电、PCB)和软件接口(RSS API),结合具体场景选择合适的 Profile 和工作模式,才能最大化其性能优势,打造出稳定、高效的无人机产品。


















 595
595

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









