







本文深入剖析Physical Intelligence公司最新发布的π0.5模型,从架构设计、训练方法到实际应用,为行业新人提供全面易懂的技术解读。
一、引言:机器人的"开放世界"挑战
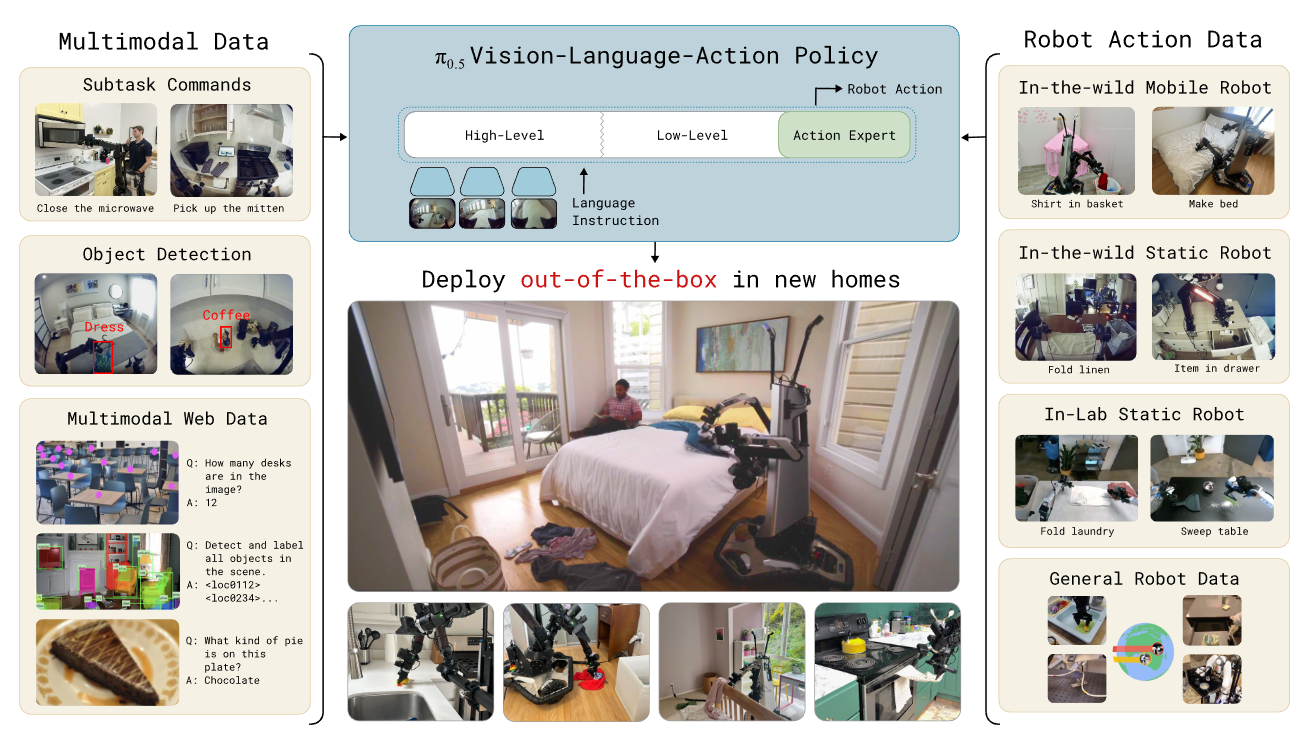
在机器人领域,一个长期存在的核心挑战是:如何让机器人适应全新环境并执行复杂任务?想象一下,一个机器人走进一个从未见过的家庭,能够理解"整理卧室"或"清洁厨房"这样的指令,并成功完成任务——这正是Physical Intelligence公司最新发布的π0.5模型所实现的突破。

本文将以通俗易懂的方式,深入解析π0.5模型的核心架构、创新点和实际应用,特别聚焦于模型部分的技术细节,帮助行业新人理解这一前沿技术的工作原理和意义。
二、 π0.5模型:开放世界泛化的里程碑
π0.5是Physical Intelligence公司在其前代模型π0基础上开发的视觉-语言-动作(VLA)模型,专注于解决机器人在开放世界中的泛化能力问题。简单来说,它能让机器人在从未见过的环境中执行复杂任务,如在陌生的家庭中整理房间或清洁厨房。
与传统机器人模型相比,π0.5的最大突破在于:
- 开放世界泛化能力:能够在训练数据中从未出现过的环境中执行任务
- 长时间任务执行:能够执行长达10-15分钟的连续复杂操作
- 多源知识整合:能够从多种异构数据源中学习和迁移知识
这些突破性能力使π0.5成为机器人领域向真正通用智能迈进的重要一步。
三、核心技术架构:模型设计的精妙之处
1. 模型基础结构
π0.5模型基于视觉-语言-动作(VLA)框架,其基础架构包括三大核心组件:
- 视觉编码器:处理环境的视觉输入,基于预训练的视觉-语言模型(VLM)
- 语言理解模块:处理自然语言指令,理解任务要求
- 动作生成系统:将视觉和语言信息转换为机器人动作序列
这一架构使π0.5能够接收图像输入和语言指令,并输出适当的机器人动作序列,实现端到端的任务执行。
2. 双路径解码机制:离散与连续的完美结合
π0.5的一个关键创新是其双路径解码机制,巧妙结合了离散和连续动作表示的优点:
- 离散自回归标记解码:用于高层次动作规划,生成语义级别的行动计划
- 连续流匹配解码:用于低层次动作执行,生成精确的机器人关节动作
这种双路径设计使模型能够同时处理抽象的任务规划和具体的物理动作执行,就像人类先思考"我要拿起杯子"(高层语义),然后才控制手臂肌肉执行具体动作(低层动作)一样。
3. 层次化决策结构:从语义到动作的无缝转换
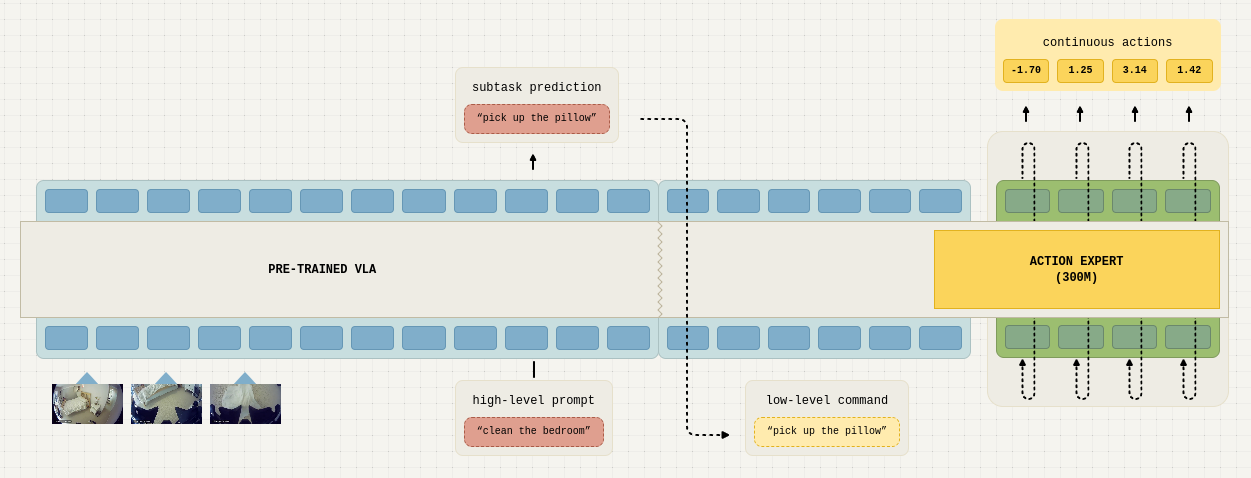
π0.5采用层次化的决策结构,分为三个主要层次:
- 高层决策模块:理解任务语义,生成子任务序列
- 低层控制模块:将高层语义动作转换为具体的机器人关节动作
- 动作专家模块:生成50步(1秒)连续低层关节动作的"动作块"
在实际运行中,模型首先输出用文本表达的"高层"动作(如"拿起杯子"),然后选择适当的机器人电机命令来执行这个高层动作,形成一种类似人类思维链的决策过程。
三、训练创新:异构数据协同训练的突破
π0.5的核心创新在于其训练方法——异构数据协同训练(co-training on heterogeneous data)。这种方法整合了多种不同类型的数据源,实现了知识的广泛迁移。
1. 多样化数据源:知识的海洋
π0.5模型训练使用了五种主要数据源:
- 移动机械臂数据(MM):约400小时的数据,记录移动机械臂在约100个不同家庭环境中执行家务任务
- 多环境非移动机器人数据(ME):使用固定机器人在各种家庭环境中收集的数据
- 跨实体实验室数据(CE):来自原始π0训练集的不同机器人平台数据
- 高级子任务预测(HL):将高级任务命令分解为更短的子任务
- 多模态网络数据(WD):包括图像描述、问答和物体定位的网络数据
值得注意的是,97.6%的训练示例并非来自执行家庭任务的移动机械臂,而是来自其他数据源,这凸显了知识迁移在模型泛化能力中的重要性。
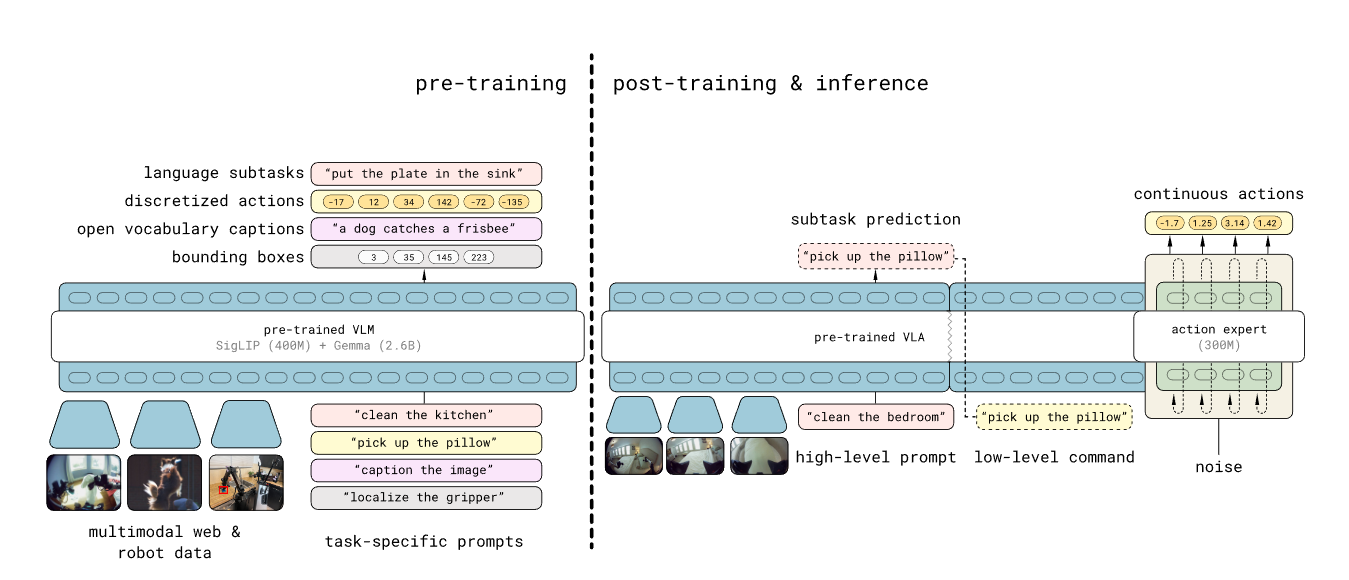
2. 两阶段训练过程:从广泛到专注
π0.5的训练分为两个精心设计的阶段:
-
预训练阶段:
- 将所有不同的数据源结合起来,构建广泛知识基础
- 生成具有离散标记的初始VLA模型
- 使用FAST动作标记器将动作表示为离散标记,提高训练效率
-
后训练阶段:
- 使模型专注于移动操作的低级和高级推理
- 利用与任务最相关的数据,包括来自人类监督者的语言指令
- 使用流匹配来表示动作分布,实现高效的实时推理和精确的动作控制
这种两阶段训练方法使π0.5能够有效整合不同来源的知识,并将其应用于实际机器人控制,就像人类先广泛学习基础知识,再专注于特定技能的精进一样。
四、推理机制:思维链式决策过程的魅力
π0.5的推理过程采用了类似人类思维链的决策机制,分为四个清晰步骤:
- 任务理解:模型首先理解给定的高级任务指令(如"清洁厨房")
- 子任务生成:将高级任务分解为一系列子任务(如"拿起盘子"、“将盘子放入水槽”)
- 动作规划:为每个子任务生成适当的动作序列,确保执行的可行性
- 执行与反馈:执行动作并获取新的观察结果,然后重复上述过程,直至任务完成
这种层次化推理使模型能够处理复杂的长期任务,同时保持对环境变化的适应性,就像人类在执行复杂任务时会不断思考、规划和调整一样。
五、实际应用案例:从理论到实践的飞跃
π0.5模型在实际应用中展示了令人印象深刻的能力,将理论研究转化为实际价值:
1. 家庭清洁任务:厨房的智能助手
在测试中,π0.5控制的机器人能够在全新的家庭环境中执行各种清洁任务:
- 关闭柜门,保持厨房整洁
- 将物品放入抽屉,整理厨房用具
- 擦拭溢出物,清洁台面
- 将餐具放入水槽,准备清洗
这些任务都是在模型从未见过的环境中完成的,展示了其强大的泛化能力和实际应用价值。
2. 卧室整理任务:贴心的家居管家
π0.5还能够执行卧室整理任务,展示了其在不同场景中的适应能力:
- 重新整理枕头,使床铺整洁
- 折叠衣物,保持衣物有序
- 挂毛巾,维持浴室整洁
- 整理床铺,提升居住舒适度
这些任务需要精细的操作技能和对环境的深入理解,π0.5能够成功完成这些任务,证明了其在复杂环境中的适应能力和实用性。
六、与π0模型的比较:进化的飞跃
π0.5相比原始的π0模型有显著改进,代表了技术的进化飞跃:
| 特性 | π0 | π0.5 |
|---|---|---|
| 泛化能力 | 主要在与训练相似的环境中表现良好 | 能够在全新环境中执行任务 |
| 训练方法 | 更依赖于特定环境的数据 | 采用异构数据协同训练,知识迁移更强 |
| 决策机制 | 单层推理 | 层次化推理(高层语义+低层动作) |
| 应用场景 | 特定环境中的技能展示 | 开放环境中的泛化能力,更接近实际应用 |
| 任务复杂度 | 相对简单的单一任务 | 能执行长达10-15分钟的复杂多阶段任务 |
这些改进使π0.5能够更好地应对现实世界中的复杂任务和环境变化,向通用机器人智能迈进了一大步。
七、技术挑战与局限性:坦诚面对的现实
尽管π0.5在泛化能力方面取得了显著进展,但作为研究者,我们也需要坦诚面对其局限性:
- 成功率不稳定:在新环境中不总是能在第一次尝试时成功,有时需要多次尝试
- 高层语义推理错误:有时会在高层语义推理上出现错误,导致任务执行失败
- 电机命令精度:在复杂操作中可能出现电机命令精度不足的问题
- 数据依赖性:尽管比π0更具泛化能力,但仍然依赖于大量多样化的训练数据
这些挑战也指明了未来研究的方向,如改进高层推理能力、提高动作精度和减少数据依赖,为后续研究提供了明确目标。
八、行业影响与未来发展:展望前路
π0.5模型的出现对机器人领域产生了深远影响,并指明了未来发展的方向:
1. 行业影响:改变游戏规则
-
推动通用机器人技术发展:π0.5展示了通用机器人控制器的可能性,为未来更灵活的机器人系统铺平道路
-
降低部署门槛:通过提高泛化能力,π0.5减少了对特定环境定制训练的需求,降低了机器人部署的成本和复杂性
-
促进多源知识整合:π0.5的异构数据协同训练方法为如何整合不同来源的知识提供了新思路,影响了整个领域的研究方向
2. 未来发展:无限可能
π0.5模型的未来发展方向可能包括:
- 自主学习:利用自主经验提高性能,减少人类监督需求
- 主动求助:在不熟悉情况下明确请求帮助或建议,增强人机协作
- 知识转移优化:改进知识转移的技术方面和数据源多样性,进一步提升泛化能力
- 模型轻量化:开发更轻量级的版本,使其能够在更多硬件平台上运行,扩大应用范围
- 多模态融合:进一步整合视觉、语言、触觉等多种感知模态,提升环境理解能力
这些发展方向将推动机器人技术向更智能、更通用、更实用的方向迈进。
九、结论:开放世界泛化的新篇章
π0.5模型代表了机器人领域在开放世界泛化能力方面的重要突破。通过创新的异构数据协同训练方法和层次化决策结构,π0.5使机器人能够在全新环境中执行复杂任务,为未来家用机器人的广泛应用铺平了道路。
对于行业新人来说,理解π0.5的工作原理和创新点,不仅有助于把握机器人领域的最新进展,也为未来参与相关技术开发提供了宝贵的知识基础。π0.5不仅是一个技术突破,更是机器人领域向真正通用智能迈进的重要里程碑。
参考资料
- Physical Intelligence官方博客:https://www.physicalintelligence.company/blog/pi05
- π0.5论文:https://www.physicalintelligence.company/download/pi05.pdf
- 深蓝学院《π0.5泛化真的强吗?》:https://zhuanlan.zhihu.com/p/1911018381315924523
- v_JULY_v《π0.5——离散化token自回归训练》:https://blog.youkuaiyun.com/v_JULY_v/article/details/147443184
如果您对具身智能或机器人技术感兴趣,欢迎关注我的公众号



















 1799
1799

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









