







1安装
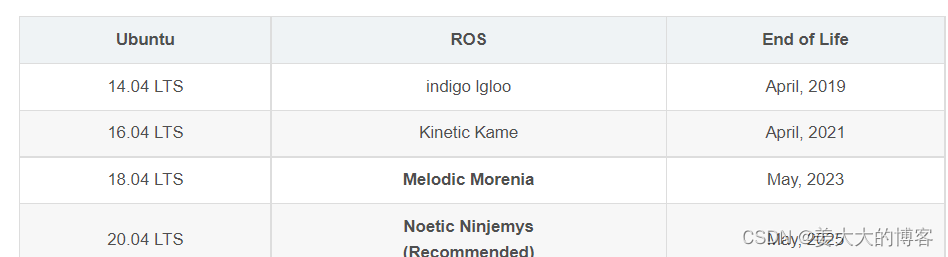
环境:ubuntu18.04 bionic
使用bionic命令查看ubuntu的发行版代号
(1)更换国内源
清华
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
(2)设置key
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
(3)更新apt
更新apt主要是因为新增了ros的源,需要从apt仓库中拉取ros的软件包。
sudo apt update
(4)安装ros
安装官方推荐的
sudo apt install ros--melodic-full
安装需要等待一段时间,这里强调一下,这软件包的名称要和自己的ubuntu发行版要对应上,否则会包报无法定位软件包的问题。(根本原因是apt源的地址的发行版仓库中没有这个包名)
(5)配置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
强调一下,如果发行版本不一致,这里的ros下的目录名称也不一致,可以手动查看一下并替换掉。

(6) 安装构建依赖
首先安装构建依赖的相关工具
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
安装rosdep
sudo apt install python-rosdep
初始化rosdep
sudo rosdep init
rosdep update

rosdep update不成功可以参考这篇博文,确实管用。
https://blog.youkuaiyun.com/Iamsonice/article/details/123315787
2 测试ROS
首先启动三个命令行(ctrl + alt + T)
命令行1:roscore
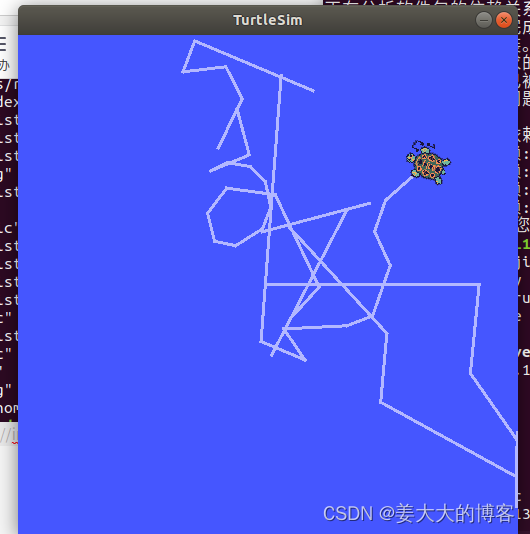
命令行2:rosrun turtlesim turtlesim_node(此时会弹出图形化界面)
命令行3:rosrun turtlesim turtle_teleop_key(在3中可以通过上下左右控制2中乌龟的运动)
运行界面


















 6871
6871

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











