






引言:突破传统WiFi的通信瓶颈
在物联网和嵌入式开发中,设备间的高效通信一直是工程师面临的重要挑战。传统WiFi通信需要依赖路由器,配置复杂且延迟较高,难以满足实时控制场景的需求。乐鑫科技开发的ESP-NOW协议为这一问题提供了理想解决方案,尤其在机械臂、遥控器、传感器网络等场景中展现出独特优势。
ESP-NOW协议解析:设备间的直接对话
什么是ESP-NOW
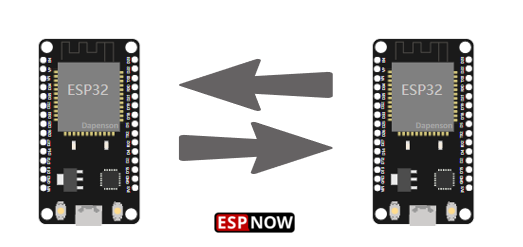
ESP-NOW是乐鑫科技专为ESP32、ESP8266芯片开发的轻量级无线通信协议,其核心特点是无需路由器即可实现设备间直接通信。可以将其比作物联网设备间的"对讲机",支持点对点、一对多和多对一的灵活通信模式。
通信模式与拓扑结构
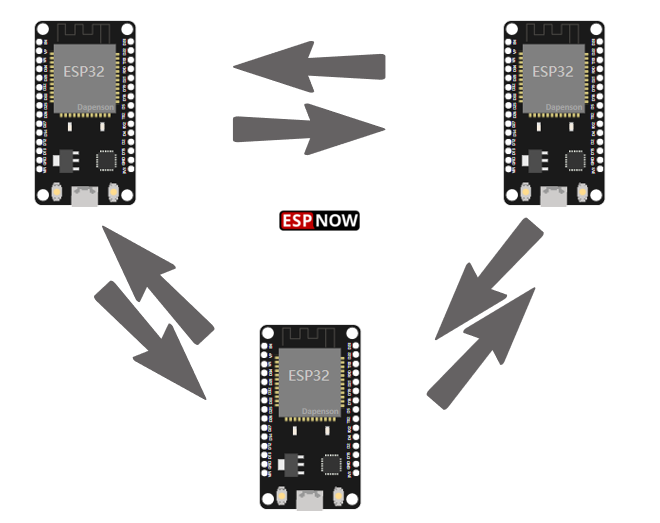
ESP-NOW支持多种通信拓扑结构,满足不同应用需求:
- 点对点通信:单个发送设备与单个接收设备直接通信(如遥控器→机械臂)
- 一对多通信:一个主控设备控制多个子设备(如智能家居中控→多个传感器)
- 多对一通信:多个设备向一个中心节点上报数据(如环境监测网络)
- 广播通信:一个设备向网络中所有设备发送数据
ESP-NOW vs 传统WiFi:技术优势对比
| 技术指标 | ESP-NOW | 传统WiFi |
|---|---|---|
| 路由器依赖 | ❌ 无需路由器 | ✅ 必须依赖路由器 |
| 通信延迟 | 毫秒级(通常<10ms) | 几十至几百毫秒 |
| 配网复杂度 | 零配置(基于MAC地址) | 需要SSID和密码 |
| 功耗水平 | 极低(适合电池供电) | 较高 |
| 通信距离 | 室内约20-50米 | 室内约30-100米 |
| 数据传输速率 | 最高250kbps | 最高150Mbps |
| 数据包大小 | 最大250字节 | 无限制 |
核心优势解析
- 超低延迟:直接通信架构大幅降低数据传输延迟,特别适合机械臂控制等实时性要求高的场景
- 简化配置:基于设备MAC地址配对,无需复杂的网络设置
- 低功耗特性:通信完成后可快速进入休眠模式,延长电池寿命
- 抗干扰能力:采用CSMA/CA机制和自动重传,确保数据可靠传输
- 代码轻量:ESP-IDF和MicroPython均提供简洁API,几行代码即可实现通信功能
实战应用:ESP-NOW在机械臂控制中的实现
机械臂遥控系统架构
在机械臂3-遥控器版项目中,ESP-NOW协议被用于实现遥控器与机械臂之间的无线通信:
- 硬件配置:遥控器和机械臂端均采用ESP32作为主控
- 通信流程:
- 遥控器采集按键信息,打包为控制指令
- 通过ESP-NOW协议广播或单播发送至机械臂
- 机械臂接收指令并执行相应动作
- 数据格式:自定义16字节数据包,包含关节角度、速度、使能位等信息
关键代码示例(MicroPython)
import network from espnow import ESPNow # 初始化ESP-NOW espnow = ESPNow() espnow.active(True) # 添加接收设备MAC地址 peer = b'\xaa\xaa\xaa\xaa\xaa\xaa' # 替换为实际设备MAC espnow.add_peer(peer) # 发送数据 data = b'CMD:1,2,3,4' # 自定义指令格式 espnow.send(peer, data) # 接收数据回调 def on_recv(e): mac, data = espnow.irecv(0) # 非阻塞接收 if mac: print(f"Received from {mac}: {data}") espnow.irq(on_recv)典型应用场景拓展
ESP-NOW协议不仅适用于机械臂控制,还可广泛应用于:
- 智能家居:灯光遥控器、窗帘控制器等低功耗设备
- 环境监测:多点传感器网络数据汇聚
- 工业控制:车间设备间短距离通信
- 机器人集群:多机器人协同工作
- 可穿戴设备:健康监测数据实时传输

开发注意事项
- MAC地址管理:设备MAC地址需要预先配对或通过广播发现
- 数据完整性:建议添加校验位,防止传输错误
- 信道选择:避开WiFi密集信道,减少干扰
- 安全考虑:可启用ESP-NOW加密功能,保护数据安全
- 电源管理:优化通信间隔,延长电池供电设备工作时间
结语:物联网通信的高效选择
ESP-NOW协议以其低延迟、低功耗、易配置的特点,为近距离物联网设备通信提供了理想解决方案。无论是DIY爱好者的机械臂项目,还是工业级的传感器网络,ESP-NOW都能展现出卓越的性能和可靠性。
本文仅对ESP-NOW协议进行基础介绍,更多技术细节和实战案例请访问原链接:
机械臂-遥控器版项目 - ESP-NOW协议详解
随着物联网技术的发展,ESP-NOW协议将在更多领域发挥重要作用,为设备间通信提供更高效、更可靠的选择。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









