







* File Name: main.c
*
* Description: This is the source code for the PWM square wave code example
* for ModusToolbox.
*
* Related Document: See README.md
*
********************************************************************************
* Copyright 2019-2024, Cypress Semiconductor Corporation (an Infineon company) or
* an affiliate of Cypress Semiconductor Corporation. All rights reserved.
*
* This software, including source code, documentation and related
* materials ("Software") is owned by Cypress Semiconductor Corporation
* or one of its affiliates ("Cypress") and is protected by and subject to
* worldwide patent protection (United States and foreign),
* United States copyright laws and international treaty provisions.
* Therefore, you may use this Software only as provided in the license
* agreement accompanying the software package from which you
* obtained this Software ("EULA").
* If no EULA applies, Cypress hereby grants you a personal, non-exclusive,
* non-transferable license to copy, modify, and compile the Software
* source code solely for use in connection with Cypress's
* integrated circuit products. Any reproduction, modification, translation,
* compilation, or representation of this Software except as specified
* above is prohibited without the express written permission of Cypress.
*
* Disclaimer: THIS SOFTWARE IS PROVIDED AS-IS, WITH NO WARRANTY OF ANY KIND,
* EXPRESS OR IMPLIED, INCLUDING, BUT NOT LIMITED TO, NONINFRINGEMENT, IMPLIED
* WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE. Cypress
* reserves the right to make changes to the Software without notice. Cypress
* does not assume any liability arising out of the application or use of the
* Software or any product or circuit described in the Software. Cypress does
* not authorize its products for use in any products where a malfunction or
* failure of the Cypress product may reasonably be expected to result in
* significant property damage, injury or death ("High Risk Product"). By
* including Cypress's product in a High Risk Product, the manufacturer
* of such system or application assumes all risk of such use and in doing
* so agrees to indemnify Cypress against all liability.
*******************************************************************************/
/*******************************************************************************
* Header Files
*******************************************************************************/
#include "cybsp.h"
#include "cyhal.h"
#include "cy_retarget_io.h"
#include <inttypes.h>
/*******************************************************************************
* Macros
*******************************************************************************/
/* PWM Frequency = 2Hz */
#define PWM_FREQUENCY (2u)
/* PWM Duty-cycle = 50% */
#define PWM_DUTY_CYCLE (50.0f)
/*******************************************************************************
* Global Variables
*******************************************************************************/
/*******************************************************************************
* Function Prototypes
*******************************************************************************/
/*******************************************************************************
* Function Definitions
*******************************************************************************/
/*******************************************************************************
* Function Name: handle_error
********************************************************************************
* Summary:
* User defined error handling function.
*
* Parameters:
* status - status for evaluation.
*
* Return:
* void
*
*******************************************************************************/
void handle_error(cy_rslt_t status)
{
if (CY_RSLT_SUCCESS != status)
{
/* Halt the CPU while debugging */
CY_ASSERT(0);
}
}
/*******************************************************************************
* Function Name: check_status
********************************************************************************
* Summary:
* Prints the message and waits forever when an error occurs.
*
* Parameters:
* message - message to print if status is non-zero.
* status - status for evaluation.
*
* Return:
* void
*
*******************************************************************************/
void check_status(char *message, cy_rslt_t status)
{
if (CY_RSLT_SUCCESS != status)
{
printf("\r\n=====================================================\r\n");
printf("\nFAIL: %s\r\n", message);
printf("Error Code: 0x%08" PRIX32 "\n", status);
printf("\r\n=====================================================\r\n");
while(true);
}
}
/*******************************************************************************
* Function Name: main
********************************************************************************
* Summary:
* This is the main function for the CPU. It configures the PWM and puts the CPU
* in Sleep mode to save power.
*
* Parameters:
* void
*
* Return:
* int
*
*******************************************************************************/
int main(void)
{
/* PWM object */
cyhal_pwm_t pwm_led_control;
/* API return code */
cy_rslt_t result;
#if defined(CY_DEVICE_SECURE)
cyhal_wdt_t wdt_obj;
/* Clear watchdog timer so that it doesn't trigger a reset */
result = cyhal_wdt_init(&wdt_obj, cyhal_wdt_get_max_timeout_ms());
CY_ASSERT(CY_RSLT_SUCCESS == result);
cyhal_wdt_free(&wdt_obj);
#endif
/* Initialize the device and board peripherals */
result = cybsp_init();
handle_error(result);
/* Enable global interrupts */
__enable_irq();
/* Initialize the retarget-io to use the debug UART port */
result = cy_retarget_io_init(CYBSP_DEBUG_UART_TX, CYBSP_DEBUG_UART_RX,
CY_RETARGET_IO_BAUDRATE);
handle_error(result);
/* \x1b[2J\x1b[;H - ANSI ESC sequence for clear screen */
printf("\x1b[2J\x1b[;H");
printf("****************** "
"HAL: PWM square wave "
"****************** \r\n\n");
/* In this example, PWM output is routed to the user LED on the kit.
See HAL API Reference document for API details. */
/* Initialize the PWM */
result = cyhal_pwm_init(&pwm_led_control, CYBSP_USER_LED, NULL);
check_status("API cyhal_pwm_init failed with error code", result);
/* Set the PWM output frequency and duty cycle */
result = cyhal_pwm_set_duty_cycle(&pwm_led_control, PWM_DUTY_CYCLE,
PWM_FREQUENCY);
check_status("API cyhal_pwm_set_duty_cycle failed with error code", result);
/* Start the PWM */
result = cyhal_pwm_start(&pwm_led_control);
check_status("API cyhal_pwm_start failed with error code", result);
printf("PWM started successfully. Entering the sleep mode...\r\n");
for (;;)
{
/* Put the CPU into sleep mode to save power */
cyhal_syspm_sleep();
}
}
/* [] END OF FILE */查看示波器的效果
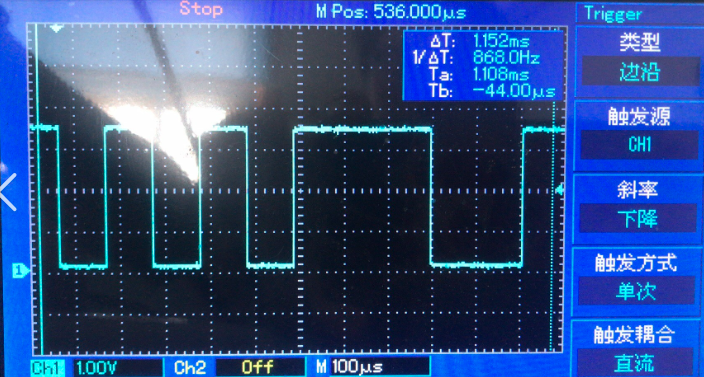
调整占空比和频率,可以实时改变方波的效果。。
---------------------
作者:单片小菜
链接:https://bbs.21ic.com/icview-3392568-1-1.html
来源:21ic.com
此文章已获得原创/原创奖标签,著作权归21ic所有,任何人未经允许禁止转载。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









