






目录
1.课题概述
RCS(反作用控制系统)是通过喷射工质产生反作用力/力矩,利用牛顿第三定律实现运动控制的系统;而摆振运动是指刚体(如摆杆)绕某一轴的周期性摆动,需通过RCS的力/力矩输入来调控其姿态与运动状态。本系统以“固定质量(Fixed Mass)”为核心刚体,通过RCS脉冲力、重力、摆臂力矩的耦合作用,实现摆振运动的控制。其本质是 利用方向余弦矩阵实现惯性系与体坐标系的转换;通过叉乘计算力臂产生的力矩;以RCS脉冲力作为控制输入,抵消重力、惯性力的影响,实现摆振的稳定或跟踪控制。
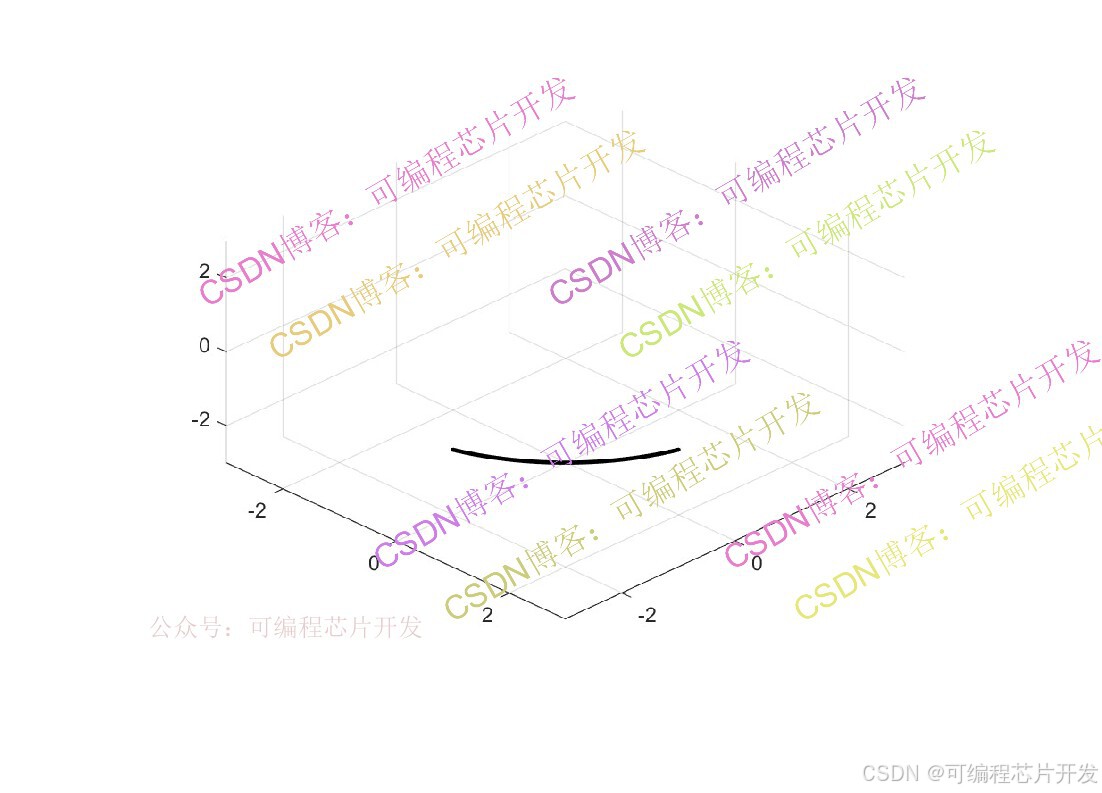
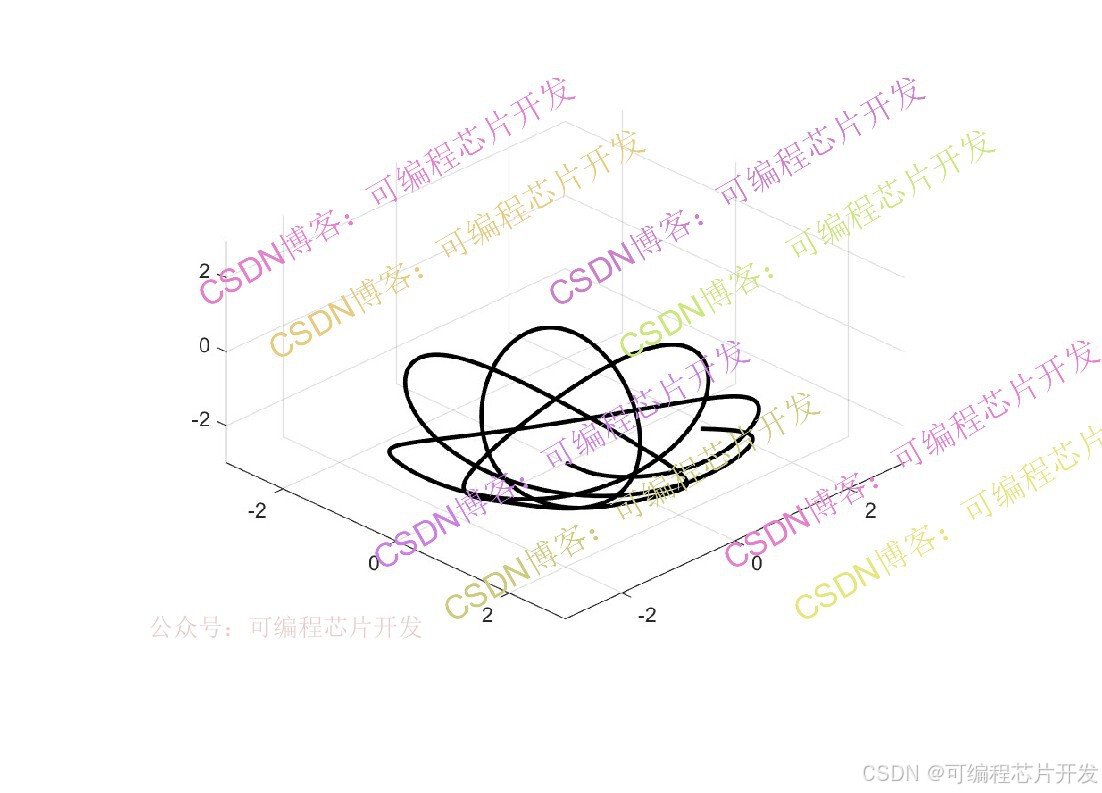
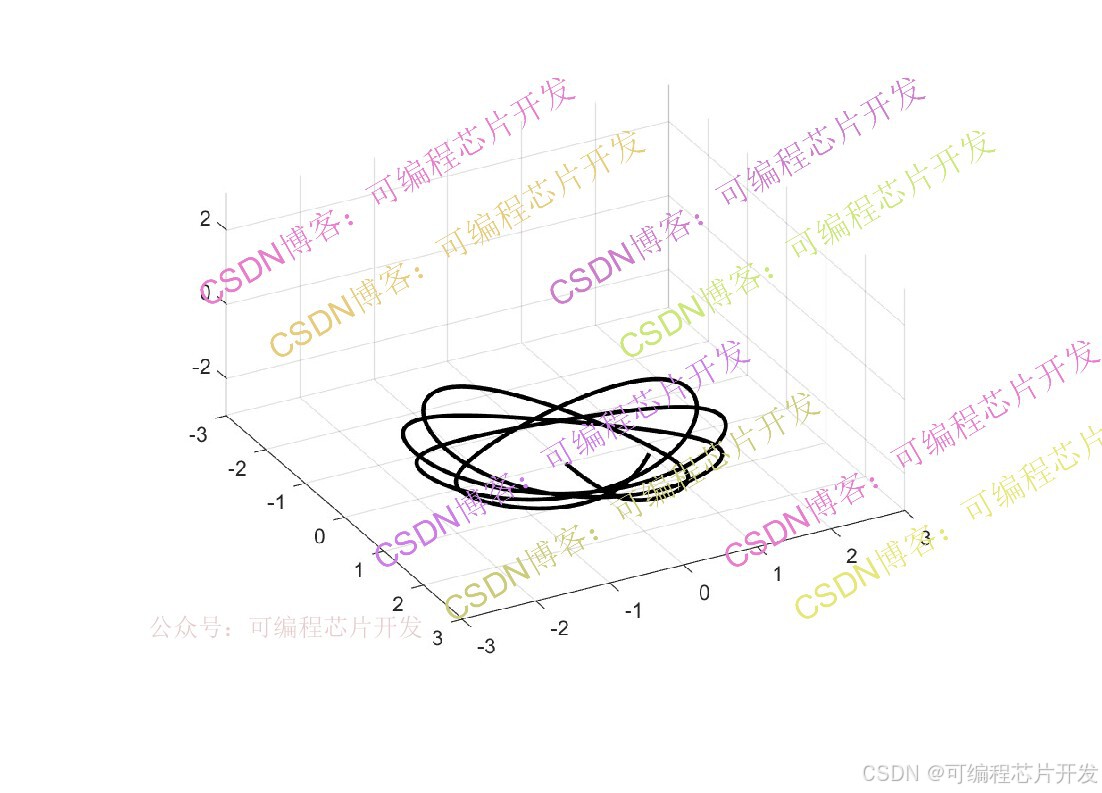
2.系统仿真结果
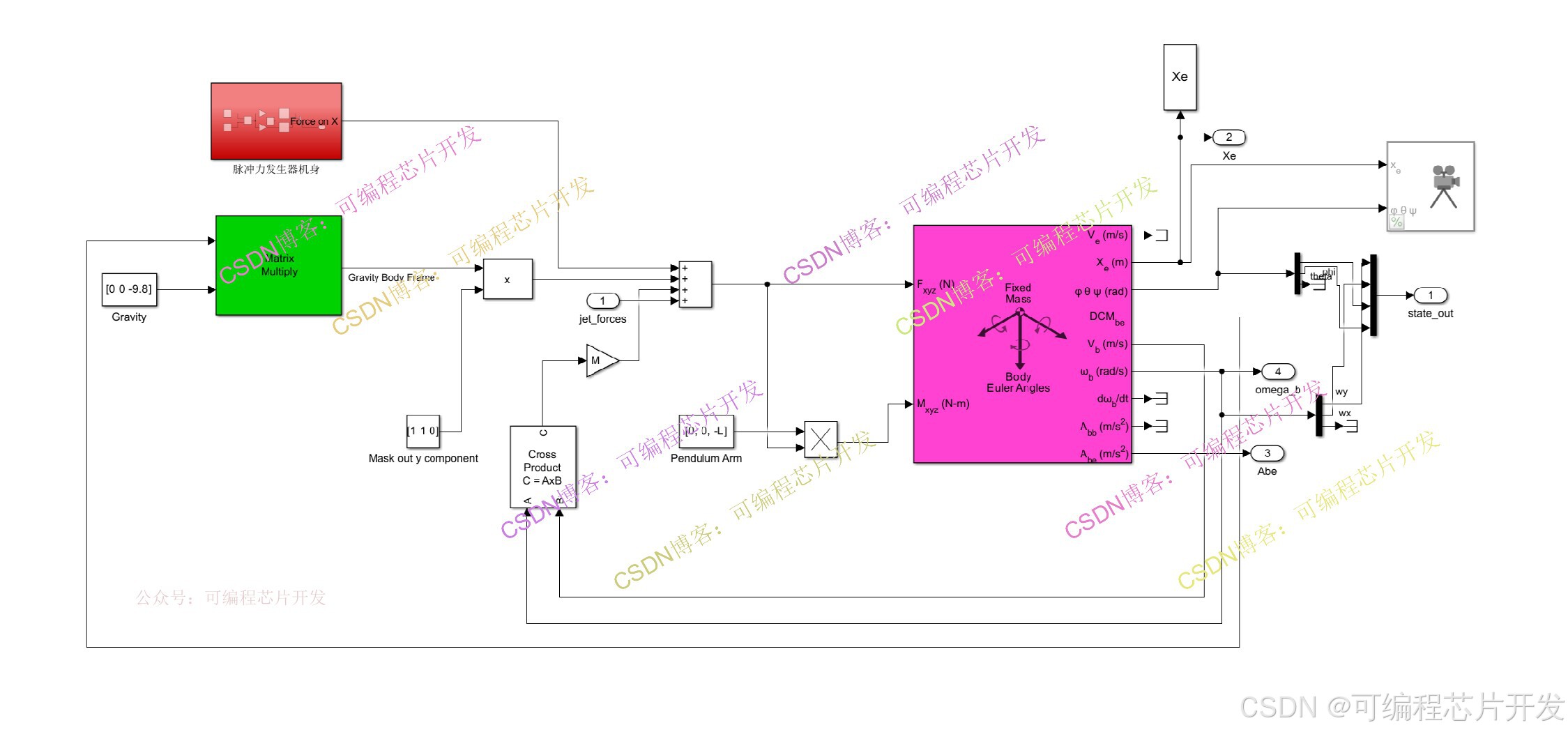
3.核心程序或模型
版本:Matlab2024b
137
4.系统原理简介
本系统实现过程如下:
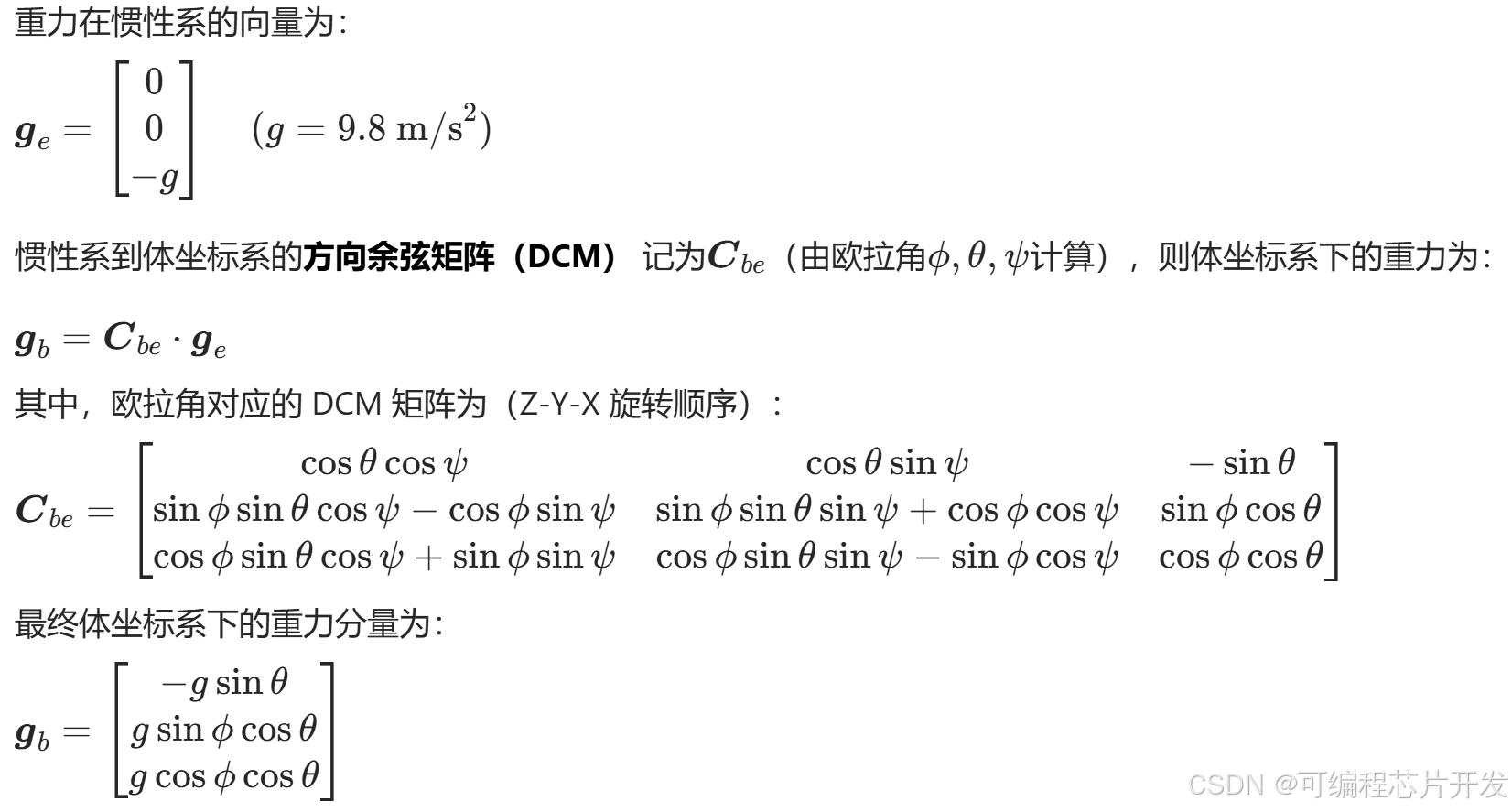
步骤1:重力的体坐标系转换
重力在惯性系中通常沿Ze轴负方向,需转换为体坐标系的分量,才能参与体坐标系的力矩计算。
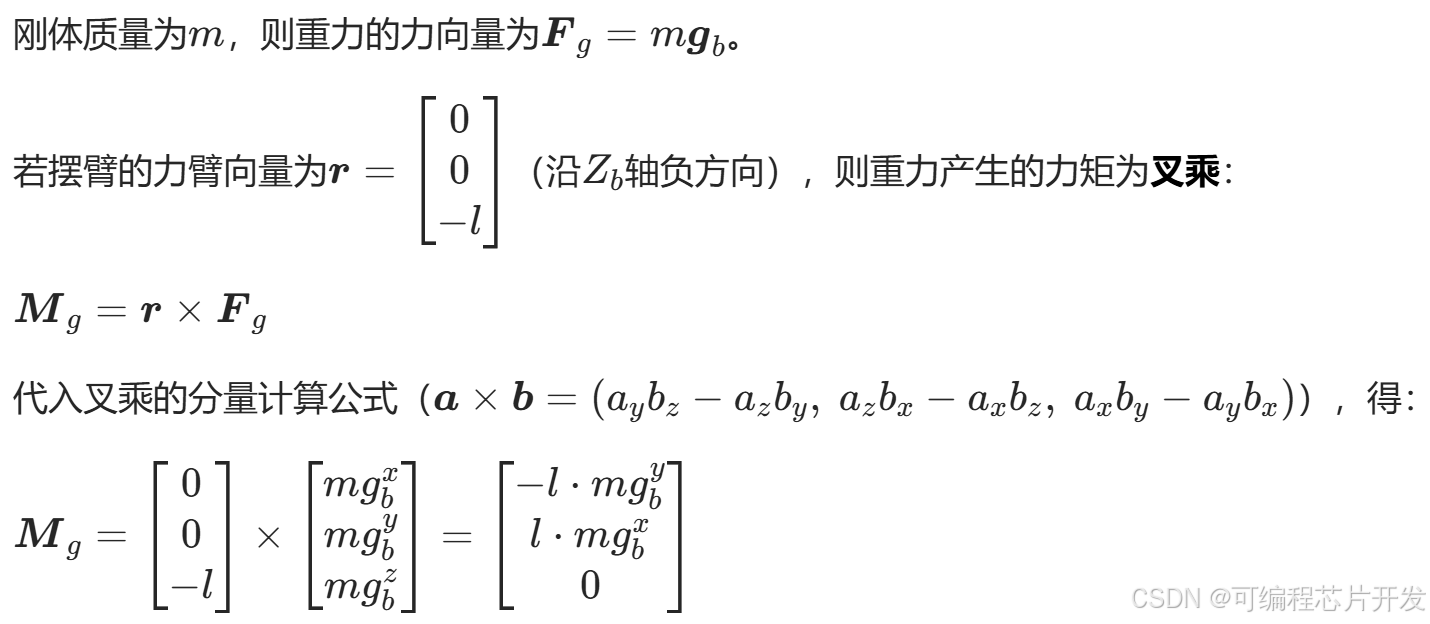
步骤2:重力力矩的计算
重力作用于刚体质心,若摆臂存在力臂(如摆杆长度l),则需计算重力对摆轴的力矩。
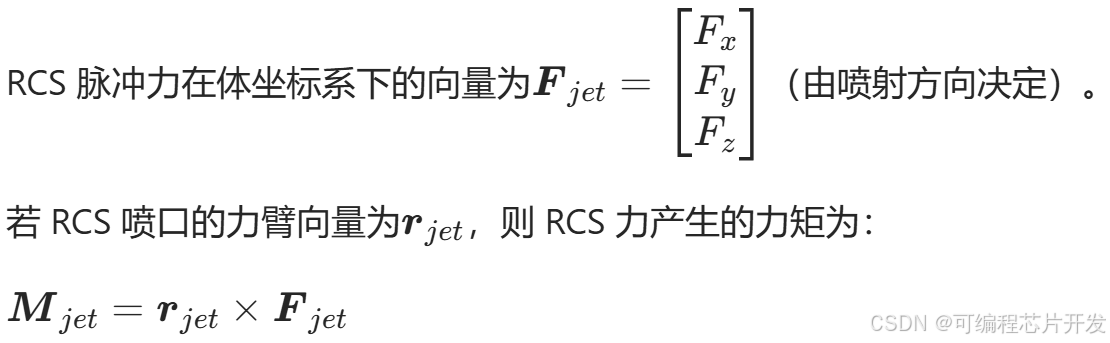
步骤3:RCS脉冲力的输入与力矩计算
RCS通过喷射工质产生脉冲力,作用于刚体表面,需转换为体坐标系下的力,并计算其对质心的力矩。
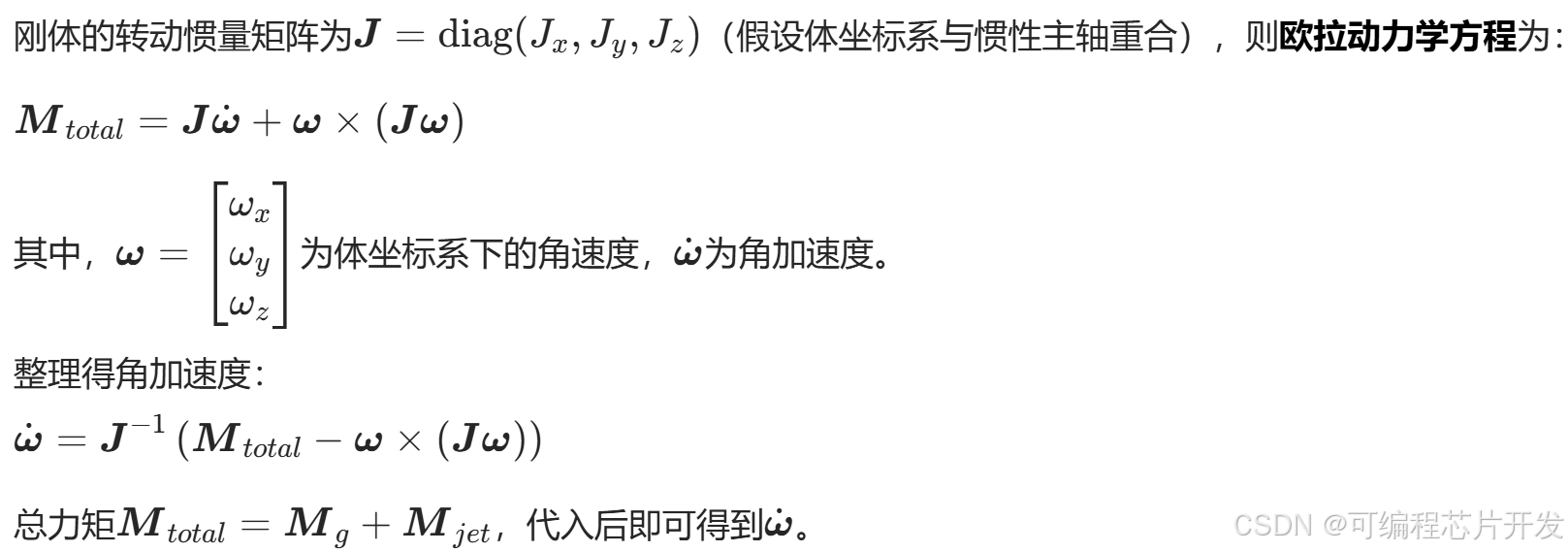
步骤4:总力矩与角加速度的计算
刚体的总力矩为重力力矩、RCS力矩的合力矩,结合转动惯量,可计算角加速度。
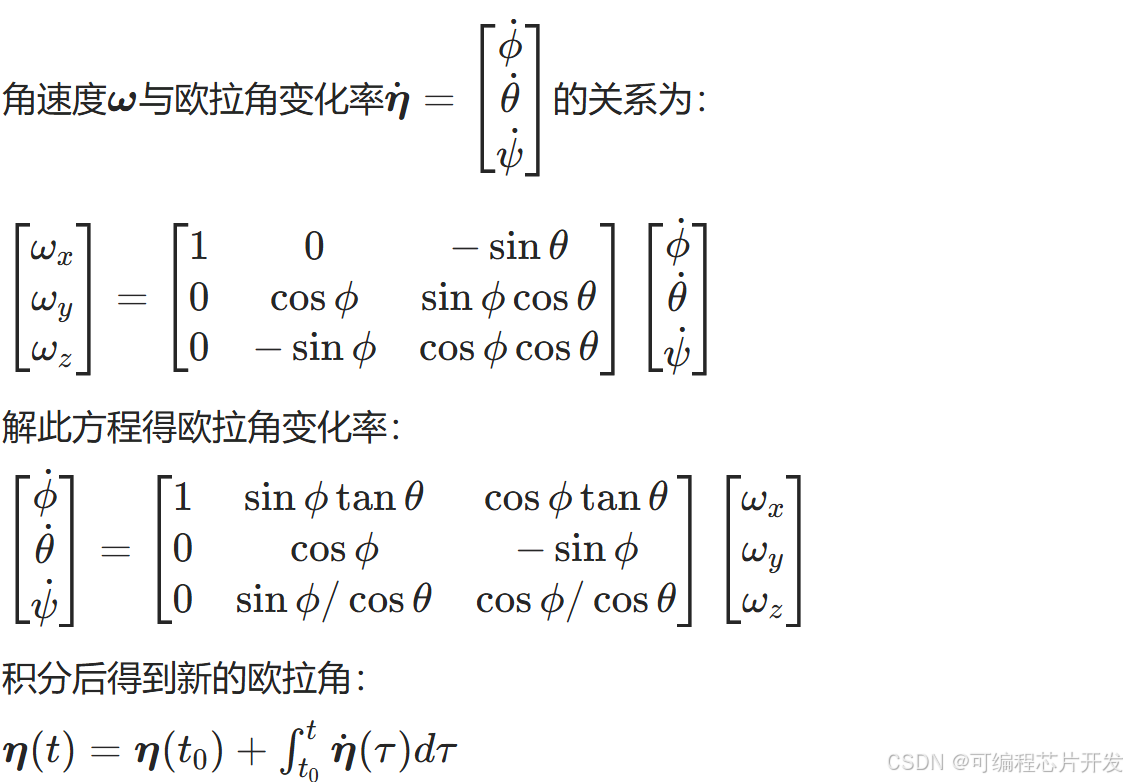
步骤5:角速度与欧拉角的更新
角加速度积分得到角速度,角速度通过欧拉角的微分关系更新姿态。
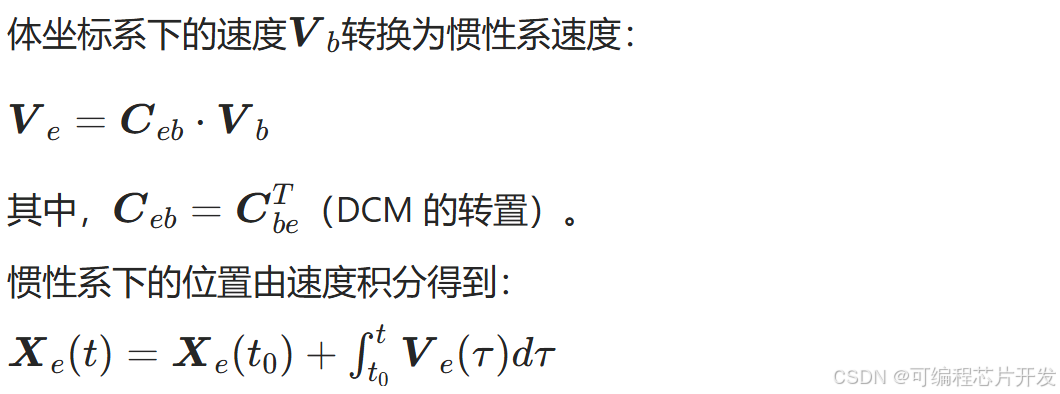
步骤6:体坐标系到惯性系的运动转换
刚体的位置、速度需从体坐标系转换到惯性系,以实现轨迹跟踪或可视化。
步骤7:RCS控制律的实现
为实现摆振运动的稳定(如定角摆动)或跟踪,需设计RCS的脉冲力控制律,抵消干扰力矩。
基于RCS的摆振运动控制,是通过坐标系变换、力矩计算、刚体动力学方程的耦合,实现对刚体姿态与摆动状态的调控。其核心步骤包括:重力的坐标系转换、力矩的叉乘计算、总力矩与角加速度的求解、欧拉角与惯性系运动的更新,以及RCS控制律的设计。
5.完整工程文件
v v
关注后,GZH回复关键词:a19


















 1486
1486

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











