




 本文介绍使用CODESYS开发环境进行跑马灯程序的设计与调试过程,包括IO模块配置、控制器连接及仿真运行等内容。
本文介绍使用CODESYS开发环境进行跑马灯程序的设计与调试过程,包括IO模块配置、控制器连接及仿真运行等内容。
今天继续我们的小白教程,老鸟就不要在这浪费时间了😊。
前面一期我们以合信的控制器为例,讲了如何实现控制器设备的安装和相关模块的添加。这一期我们以合信的控制器为例,主要讲如何与实际设备没有连接,并展示一下具有IO控制功能的程序开发,让大家对控制器的使用有一个实际的感受。
一、IO模块控制编程
下面我们用这个控制器来做一个跑马灯的程序,主要是为了方便演示。在实际控制设备的过程中,实现的流程和功能跟这个程序其实差别不大。
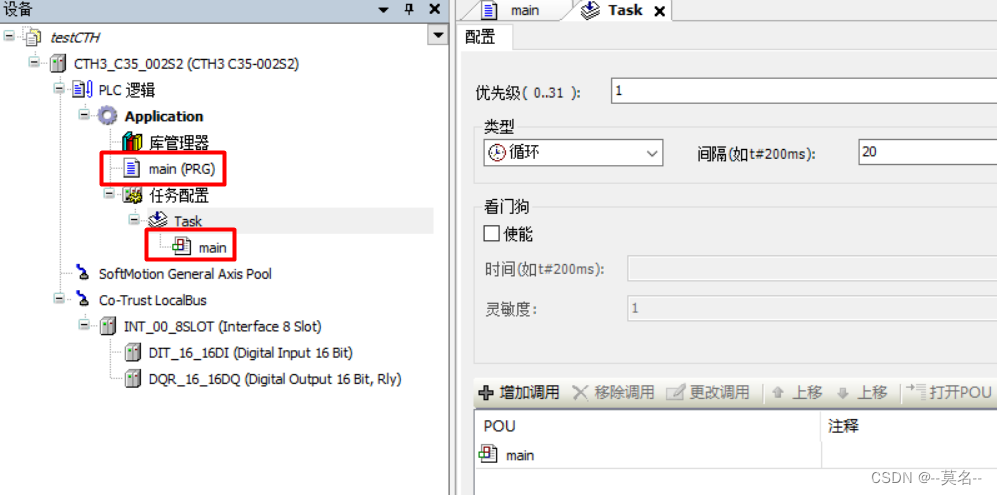
与第一期类似,首先需要通过在“Application”上点右键选择“添加对象”添加必要的模块,即任务配置和POU,POU的名字仍然用main,类型还是选择程序。然后在“任务配置àTask”中添加对main程序的调用,添加后如下图所示:
首先定义几个BOOL量的数组,用来代表IO模块的输入输出。其中IN[0]作为跑马灯程序的启动键,IN[1]作为跑马灯程序的停止键,IN[2]表示跑马灯的定时周期为1秒,IN[3]表示跑马灯的定时周期为0.2秒。启动信号给出后对OUT定时依次进行置位和复位。停止信号给出后程序停止运行。
程序如下:
PROGRAM main //变量声明部分
VAR
IN : ARRAY[0..15] OF BOOL;
OUT : ARRAY[0..15] OF BOOL;
i : INT :=0;
j &nbs
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 7732
7732

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









