



云存储平台的量化属性访问控制模型
摘要
近年来,云计算是信息技术领域最主要的研究方向之一。同时,云计算安全成为一个重要的挑战。现有的访问控制模型在模型元素的细粒度和动态性方面表现较差,导致云计算中资源的安全性受到限制。本文提出了一种基于量化属性的访问控制(QABAC)模型。定义了量化属性和信任度的概念,提出了三种属性量化函数用于动态计算,并获得访问的安全度。最终授权策略根据信任度决定最终权限。与其他传统模型相比,QABAC具有灵活性、可扩展性和动态性。它不仅能保护资源免受网络潜在攻击的安全威胁,还具备满足实际应用中性能需求的能力。
关键词 :访问控制 Dynamic授权 Cloud计算安全
1 引言
云计算是一种新兴的计算范式。它以互联网为中心,提供存储、计算和通信等所有资源作为服务。云计算是能力与创新技术的独特结合[1],能够为不断增长的数据和服务提供可扩展且强大的环境,并通过无处不在且低成本的平台充分利用每台计算机的计算资源。同时,它可以减轻客户端在管理和维护方面的负担。因此,它很快吸引了大量研究人员和企业的关注。
安全是采用云计算面临的主要挑战之一。云存储平台安全中的三个主要问题如下。(1) 数据库所有者的控制能力有限。(2) 访问权限将随时间[2]调整。(3) 因此,数据面临隐私和未授权访问等问题[3]。
因此,应将访问控制(AC)引入云计算中,以通过访问策略[4]保护敏感数据。访问控制模型的研究始于上个世纪70年代,最初用于大型计算机访问授权管理中的数据共享。基于角色的访问控制(RBAC)模型是传统访问控制模型中最经典的模型之一[5]。随后,用户属性、对象属性和环境属性等属性被引入到模型中,提出了基于任务的访问控制(TBAC)[6, 7]和基于动作的访问控制(ABAC)[8]等新型访问控制模型。
该模型主要在两个方面进行了改进,即模型元素和可靠性计算。(1)扩展传统访问控制模型。将新的模型元素引入模型中,用于补充主体和客体的属性。(2)提出了三种映射函数。将属性的值映射为具有统一计量标准的数值,进一步利用这些数值评估用户行为的置信区间。
本文其余部分组织如下。第2节详细介绍QABAC模型及授权过程。第3节分析了我们的模型,并展示了其在云存储平台中的性能。第4节总结了该方法。
2 我们的访问控制模型
2.1 模型基本元素
QABAC模型从主体和客体的角度全面限制访问,可表示为QABAC = {U; R; O; 操作; OPC}。
主体(U) :数据资源请求者。U = {用户1;用户2;…用户n},每个用户由其相关属性定义,并通过用户ID进行标识。
角色(R) :由具有相同身份属性的用户组成的集合。
客体(O) :云存储平台提供的服务,如存储、计算和通信。
环境(E) :一个集合,包含主体的网络环境和终端平台信息。
日历(C) :日历用于描述时间,它是一个无限的周期性连续时间集合,例如小时、天、月和年[9]。
时间(T) :给定一组日历C1…Cn。相应的时间可被n定义为 T = ΣCi。r ≥ Cd。点号前面的部分表示开始时间,后面的部分表示持续时间。
操作(操作) :主体与客体之间的一种关系。该元素用符号表示为 操作 = R × E × T。
操作类型 (OPC) :用户将以不同方式操作资源。操作类型由以下公式定义。Opc = {read, write, delete, update}。
2.2 映射规则
通过角色和访问客体对用户进行授权限制。定义相应的映射规则以关联不同元素。
权限分配(PA) :权限与角色、操作和操作类型这三个要素之间的关系。对应的映射函数为(1)。
$$
P_{assigned}(r) = { p \in P | (p, \text{role}, \text{action}, \text{opc}) \in PA } \quad (1)
$$
用户属性映射(UAM) :用户与属性之间的一对多映射关系。角色属性的内容通过映射函数映射为某个值,如(2)所示。
$$
AttrMap_{uattr} = (\forall attr \in Attr | (u, attr) \in UAM) \quad (2)
$$
环境属性映射(EAM) :环境与属性之间的一对多映射关系,环境属性的内容被映射为一个数值。对应的映射函数为(3)。
$$
AttrMap_{eattr} = (\forall attr \in Attr | (e, attr) \in EAM) \quad (3)
$$
时间属性映射(TAM) :时间与属性之间的一对多映射关系,环境属性的内容被映射为某个值。对应的映射函数为(4)。
$$
AttrMap_{tattr} = (\forall attr \in Attr | (t, attr) \in TAM) \quad (4)
$$
2.3 属性量化
量化属性 :根据映射函数,将用户属性域的值转换为数值,并将这些数值输入信任计算函数以计算用户信任[10]。用户和操作的信任计算函数如(5)和(6)所示。
$$
qty_U(U_{attr}) = \sum_{i=1}^{n} w_i V(u_{attr_i}) \quad (5)
$$
$$
qty_A(A_{attr}, t) = \sum_{i=1}^{n} w_i V(u_{attr_i}) + \sum_{j=1}^{m} w_j V(e_{attr_j}) + \sum_{k=1}^{z} w_k V(t_{attr_k}) \quad (6)
$$
其中,$V(e_{attr_j})$ 是环境属性的值,$V(t_{attr_k})$ 是时间属性的值,$w_j$ 和 $w_k$ 分别是相应属性的权重。t 表示计算时刻。
最终信任 :最终信任的计算基于这两类属性的评估结果,且最终信任的计算函数定义为(7)。
$$
c(U_{attr}, A_{attr}, t) = qty_U \times qty_A \quad (7)
$$
权限授予 :访问控制模型根据动态授权策略确定用户访问的权限。如果用户访问的安全级别高于对资源文件执行该类型操作所需的最低安全级别,则允许访问,否则将拒绝访问[11]。
3 安全分析与性能评估
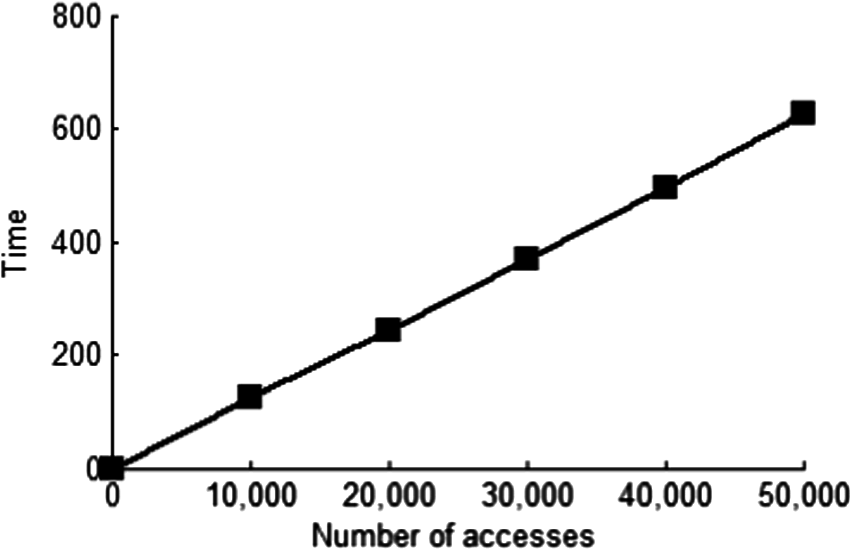
QABAC模型使用C++语言实现。实验在配备3.3 GHz和4G内存的英特尔酷睿4处理器上,基于Windows 7系统运行。本文共包含五组数据,每组含有一万次访问。图2显示了随着访问次数增加的授权时间趋势。显然,访问时间呈现出线性增长趋势,并且能够同时处理千万级访问的授权。
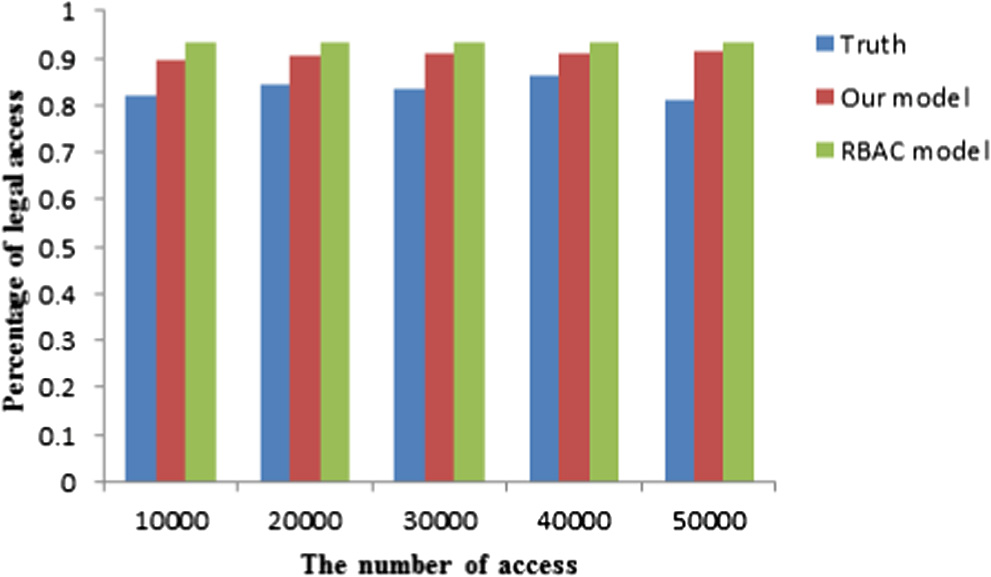
QABAC和RBAC模型用于授予这些访问行为的权限,两种模型的正确率通过 (8) 计算。
$$
C = \frac{n}{N} \quad (8)
$$
其中,$C$ 是正确率,$n$ 表示正确授权的访问次数,正确授权包括允许合法访问和拒绝非法访问两种情况,$N$ 是总访问次数。
图3显示了两种模型之间的授权正确率,其中x轴表示访问行为的数量,y轴表示授权正确率。随着访问行为数量的增加,QABAC接近真实准确率,且明显高于RBAC模型。
4 结论
本文提出了一种面向云计算的访问控制模型。该模型利用角色和任务原则,使权限分配更加动态和便捷。将时间与环境引入模型元素中,并定义了相应的属性。设计了包含类别和值的这些元素。通过动态量化函数计算每次访问的结果,将这些访问划分为不同的安全级别。实验证明,它可以满足云计算中的访问控制要求。

















 1174
1174

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









