



用于自动驾驶测试平台的高可扩展雷达目标模拟器
摘要
汽车雷达传感器是高级驾驶辅助系统和自动驾驶的关键组成部分。为了测试这些系统在复杂且潜在危险的交通场景中的行为,需要具备模拟真实场景能力的测试系统。本文介绍了模块化且高度可扩展的雷达目标模拟器的实现,该模拟器能够以真实参数模拟多个独立的移动目标。
索引术语
雷达目标模拟器,汽车雷达,可扩展性,系统架构
引言
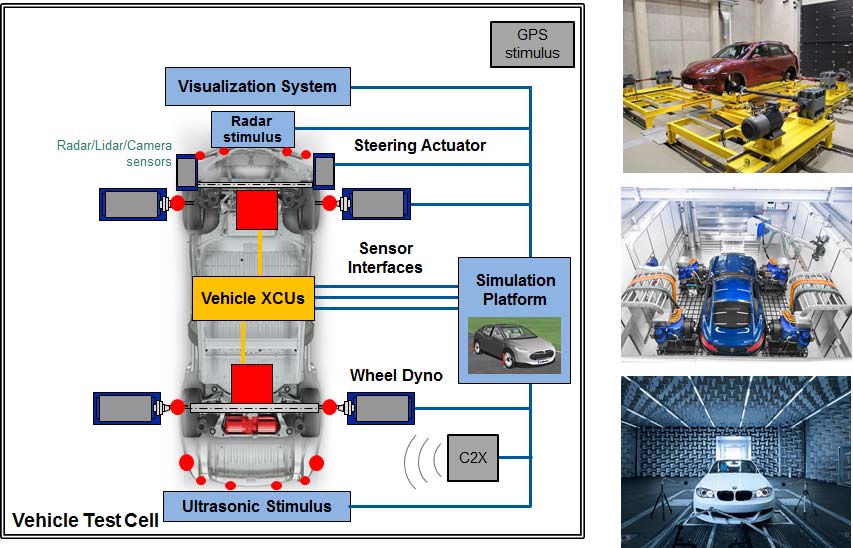
在现代汽车中,多种高级驾驶辅助系统(ADAS)和自动驾驶功能(ADF)已经为驾驶员提供支持。与此同时,行业正在大力推动实现自动驾驶的愿景。所有这些功能的共同点在于,在面向客户发布之前,必须进行全面的测试程序。第一步是在软件和电子系统级别进行基本测试,以验证其在不同情况下的功能表现。目前第二步测试主要在测试跑道和公共道路上进行,以验证其在所有可能场景下的功能,这是一项极具挑战性的任务[1]。理论上,需要使用原型车完成一亿公里测试里程才能证明自动驾驶车辆的可靠性[2]。然而,在公共道路或测试跑道上进行测试存在限制,例如涉及驾驶员和环境安全风险的危险场景无法实际执行。为应对这些问题,AVL List有限公司正在开发一种新型测试系统——Driving‐CubeTM,如图1所示。
Driving‐CubeTM能够通过动态世界模型模拟测试场景,并向轮轴施加扭矩、模拟转向以及向传感器输入基于仿真结果的真实数据,从而实现车辆在环测试[3]。反馈回路将车辆的控制输出重新传入仿真系统。在此系统中最具挑战性的任务之一是精确雷达目标的模拟。原因在于仅能使用空中接口,需覆盖从2米到300米的距离范围,并且必须生成多个真实目标。此外,由于车辆可能采用不同的雷达传感器,且无法获知、假设或估计雷达波形及其特性,这一任务变得更加复杂。
作为一种可能的解决方案,基于数字射频存储(DRFM)技术的数字雷达目标模拟器(RTS)可用于覆盖远距离和多个复杂目标,但由于对信号进行采样和处理而产生的高延迟,导致无法使用原始信号覆盖近距离区域。目前可用的替代方案——模拟RTS(例如[4],[5],[6])——能够覆盖近程和远程区域,但缺乏可扩展性,无法模拟大量独立目标。为满足这些需求,我们开发了一种高度可扩展的模拟雷达目标模拟器,该模拟器能够覆盖近距离范围,并可处理多个独立的移动目标。
II. 雷达目标模拟器架构
A. 雷达目标模拟
为了模拟雷达目标,必须接收雷达的发射信号,根据模拟目标的参数进行相应处理,然后将信号重新发送回雷达传感器。距离范围 $ R $ 可通过使接收到的信号延迟持续时间为 $ \tau $ 来模拟,如公式(1)所示,其中 $ c_0 $ 表示大气中的光速。这种延迟通常可通过使用光学、同轴或声表面波(SAW)/体声波(BAW)延迟线来实现。
$$
\tau = \frac{2R}{c_0}
\quad (1)
$$
为了实现所需的雷达散射截面(RCS),使用可编程衰减器来设置所需的环路增益 $ G $,其遵循公式(2)中的衰减特性,其中 $ \sigma $ 表示所需的RCS,$ f_0 $ 是雷达信号的中心频率。此外,还需要一些可编程衰减器来补偿模拟距离的自由空间损耗。
$$
G = \frac{\sigma 4\pi f_0^2}{c_0^2}
\quad (2)
$$
运动的模拟更为复杂,因为距离范围必须根据速度 $ v $ 进行改变,同时信号必须在频率域中根据(3)式以多普勒频率 $ f_D $ 进行频移。多普勒频移可以通过使用矢量调制器实现,而目标的运动则需要精确控制距离变化过程的时序,以实现逼真的距离‐多普勒耦合。
$$
f_D = \frac{2vf_0}{c_0}
\quad (3)
$$
B. 通用系统概念
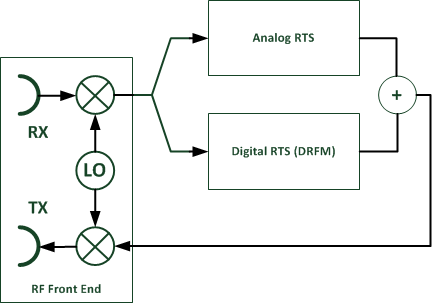
为了满足高级驾驶辅助系统和自动驾驶功能测试所需的要求,我们提出一种混合结构,该结构由一个用于覆盖近距目标的模拟RTS和一个用于远距离目标的并行数字射频存储模块组成。为了实现上述功能,两个模块都必须在中频域中实现。因此,需要一个接口将雷达传感器工作频率范围转换到中频域。这种方法还使得整个平台能够轻松适配不同的雷达传感器频段,因为只需更换射频前端即可。
该方法的框图如图2所示。由于数字射频存储模块是市场上 readily available,我们的开发重点是短距离可扩展模拟雷达目标模拟器的开发。
C. 模块化可扩展模拟雷达目标模拟器
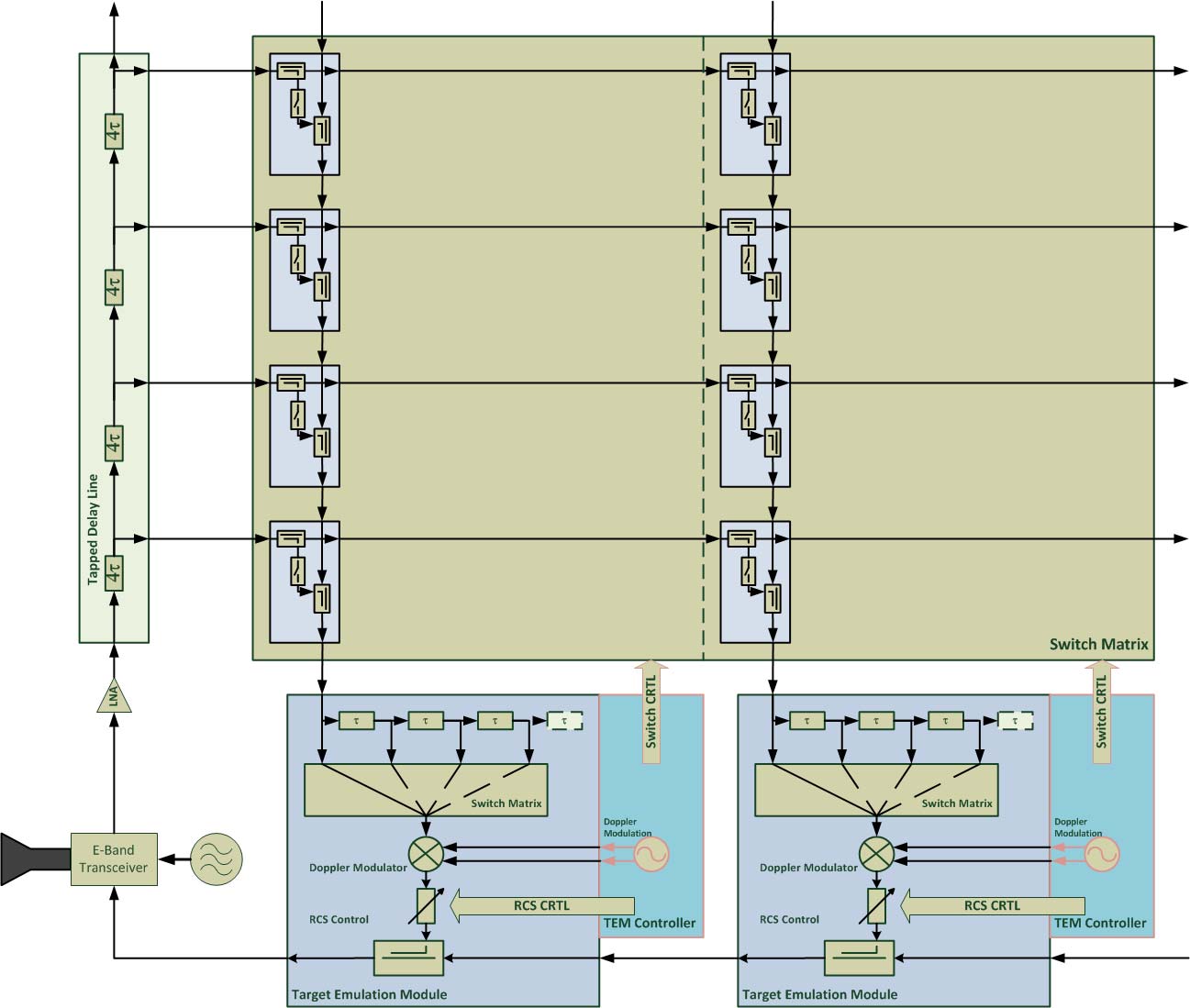
为了实现模拟RTS所需的可扩展性,该系统被划分为三个功能模块:抽头延迟线(TDL)、开关矩阵(SWM)和目标仿真模块(TEM)。TDL提供距离范围仿真所需的所有延迟,并将这些延迟信号分发到SWM的各行。开关矩阵的每一列对应一个专用的TEM,位于行与列交叉点处的开关可将相应延迟的信号转发至TEM进行处理。所有用于精确目标仿真的其他功能均集成在TEM中,这使得在不影响系统架构其余部分的情况下,能够轻松升级以支持更复杂的目标仿真能力。RTS的控制架构采用分布式系统实现,每个TEM都配备有独立的控制夹层模块。该模块负责为TEM生成雷达目标仿真信号,并控制相应的SWM列。所提出的架构的详细框图如图3所示。
该系统的可扩展性通过在所需位置插入附加模块来实现。通过添加额外的TDL模块以及开关矩阵中的额外一行,可以扩大RTS的覆盖距离范围。通过插入更多的TEM模块及相应的列到开关矩阵中,可以实现更多目标。
III. 模拟雷达目标模拟器实现
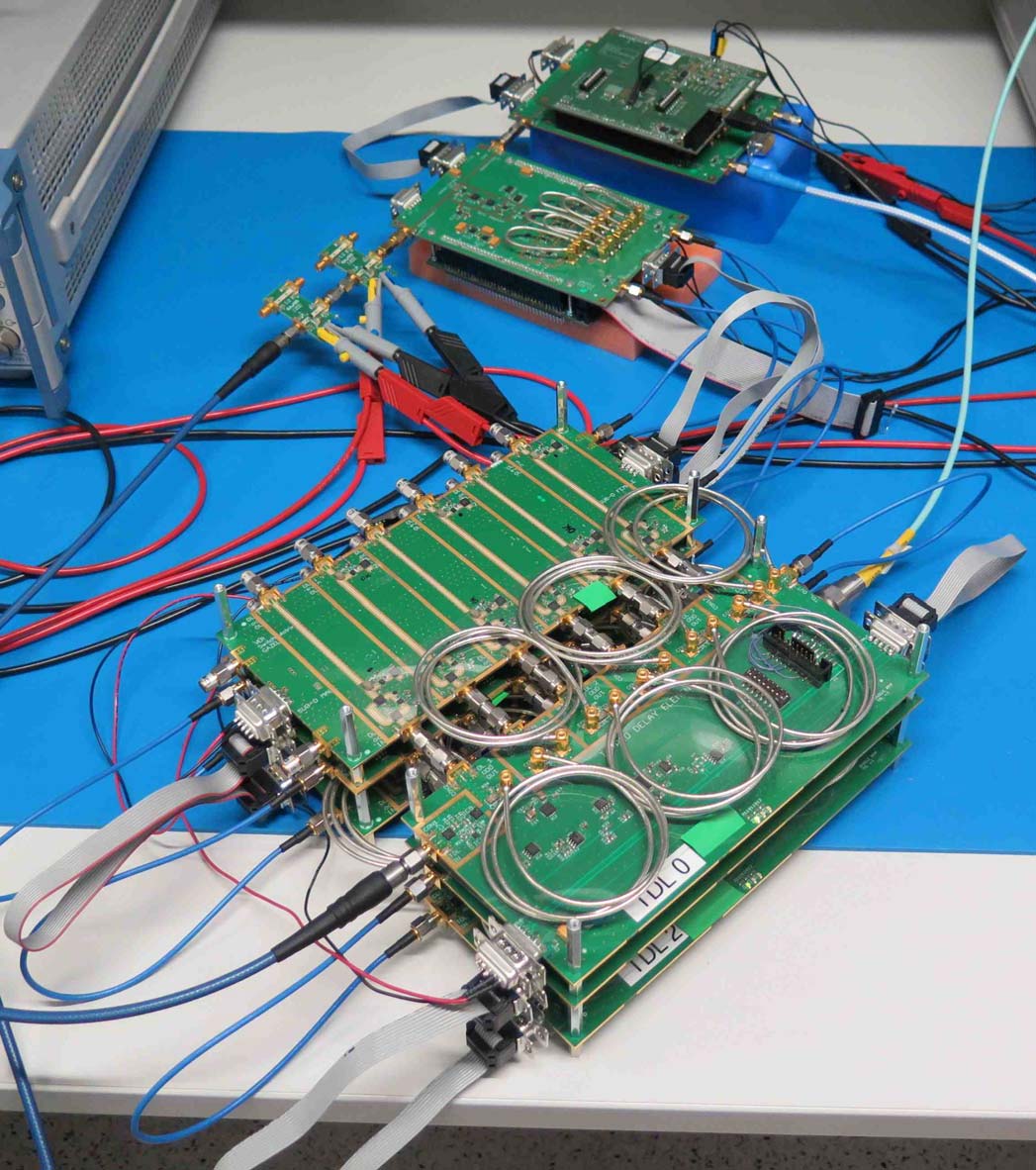
所提出的架构已实现为一个演示系统,如图4所示,用于两个独立目标。所有模块均配备有微控制器,用于生成控制信号。这些微控制器通过CAN总线与相应的测试设备管理器进行通信。控制消息的交换。作为附加功能,每个模块都配备了一个电可擦除可编程只读存储器,用于存储校准数据以补偿损耗,从而为雷达散射截面模拟提供精确的系统增益。
A. 射频前端
射频前端负责捕获雷达信号,将其转换为实时目标模拟器(RTS)的中频,并确保能够轻松适配不同的射频频段。为了实现这些目标,前端包含两个独立的混频器模块,用于上变频和下变频,这两个模块由可编程合成器提供的同一本振(LO)信号驱动。通过这种共用本振的设计,可以保证重广播雷达信号的相干性,并利用自抵消效应[7]降低本振的相位噪声。为了在接收(RX)和发射(TX)路径之间提供足够的隔离,每个混频器都配备有独立的天线,从而最大限度地减少多径虚假目标,并扩大可实现的雷达散射截面(RCS)值范围。此外,前端还可配备吸波材料、波导隔离器和滤波器,以帮助减少由装置自身产生的杂波和虚假目标。
B. 抽头延迟线
抽头延迟线并行提供所有所需的粗略延迟,从而可以在不同距离上设置独立的目标,且不受任何限制。延迟线的实现采用等长的同轴电缆和定向耦合器来复制接收信号。在每个抽头之后。为了补偿电缆的损耗,在每个TDL模块的输入端都放置了可编程低噪声放大器。
C. 开关矩阵
开关矩阵将抽头延迟线(TDL)的粗略延迟连接到每个需要该延迟的测试设备管理器(TEM)。为了实现所需的可扩展性,信号不会直接切换到TEM,而是通过定向耦合器复制信号,然后切换到为每个TEM独立设置的加法链。该加法链允许实时目标模拟器(RTS)同时将多个延迟耦合到一个TEM,从而实现具有横向尺寸目标的生成。为了减少切换阶段的相位跳变,开关矩阵为每个TEM提供两列加法链,从而实现冷列切换。
D. 目标仿真模块
实时目标模拟器(RTS)的核心部件是目标仿真模块。该模块包含精细时间延迟以及冷列切换的第二级。此外,所有用于精确表征雷达目标的处理步骤均在此处汇总。精细时间延迟是抽头延迟线(TDL)的一个较小复制品,其使用的延迟仅为TDL中延迟的一小部分。采用这种两级分层结构是为了最小化延迟抽头电缆、定向耦合器和开关元件的硬件开销。雷达目标的表征通过矢量调制器实现所需的多普勒频移,并结合多个可编程衰减器来设置雷达散射截面(RCS)以及模拟路径损耗。为了确保实时目标模拟器(RTS)的可扩展性与发展能力,系统采用了包含现场可编程门阵列(FPGA)和微控制器的控制夹层模块,用于生成针对每个目标所需雷达目标特性的控制信号。
第四节 测量与演示
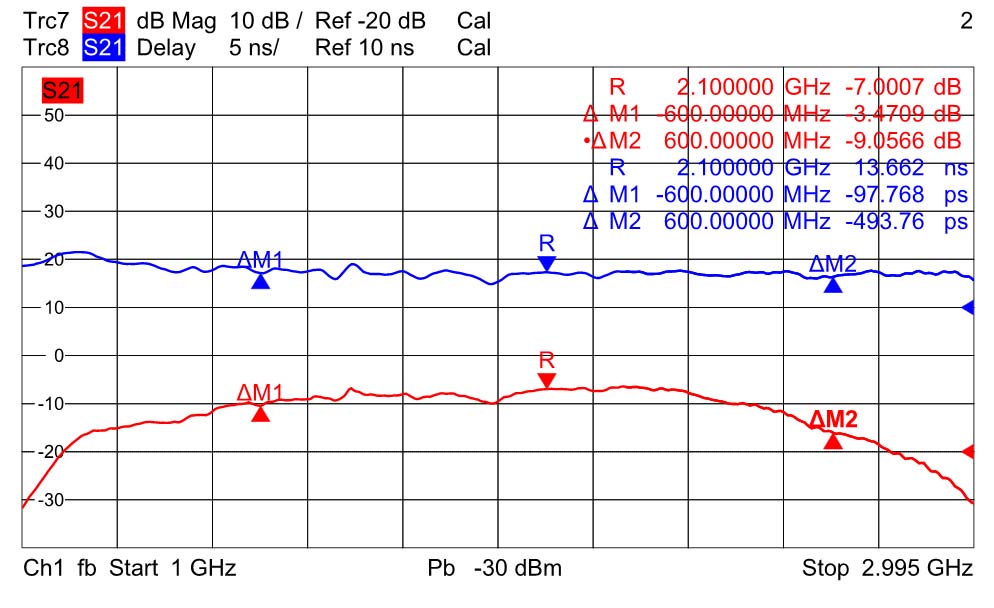
已实现RTS概念的功能演示器,并在实验室中进行了 extensive 测试。如图5所示,该实现达到了1.2吉赫兹的带宽。在整个带宽范围内,群延迟保持平坦,纹波为600皮秒,相当于10厘米的距离范围变化。
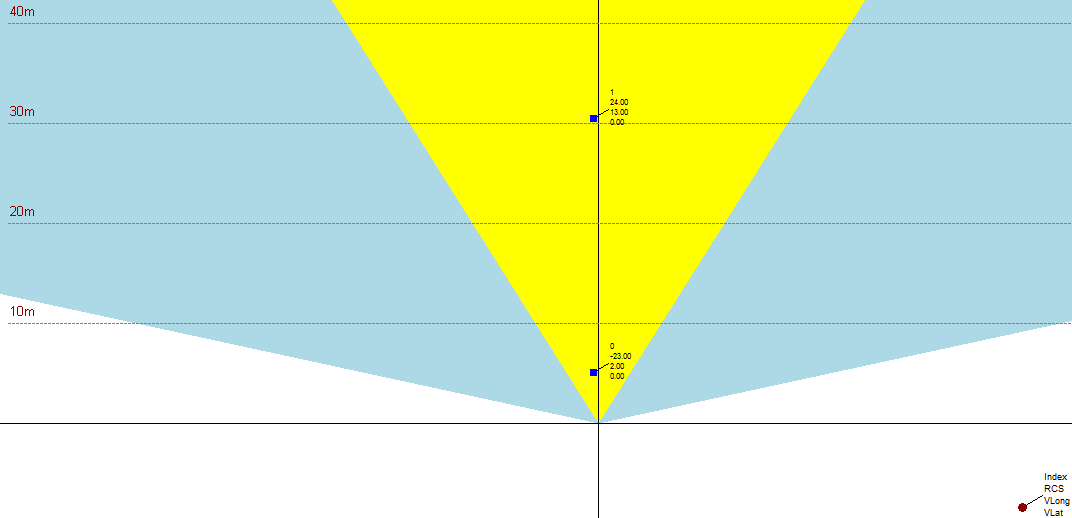
在完成所有模块的测量和整个系统的集成(图6)后,搭建了汽车雷达的演示系统。雷达传感器的响应被读取并传送到由传感器制造商提供的原始软件操作的可视化平台。在此演示过程中,我们展示了我们的实时目标模拟器(RTS)能够在5至30米的距离范围内模拟两个独立移动目标,这些目标被雷达传感器成功检测到,如图7所示。我们还成功展示了50分贝的RCS动态范围。此外,我们还验证了生成的目标能够被传感器的目标跟踪器识别和跟踪。

五、结论
本文展示了高度可扩展的雷达目标模拟器的开发与实现,该模拟器适用于自动驾驶功能和高级驾驶辅助系统测试所需的复杂任务。当前演示器的实现证明了所提出的架构的有效性。它能够模拟两个独立移动目标,距离范围为5到30米,RCS动态范围达50分贝。目前正在开发该架构的未来改进,包括用于远距离覆盖的数字RTS、用于角度运动的扩展天线前端、模拟复杂雷达目标特征的能力,以及在城市环境中模拟真实世界场景时引入干扰。

















 3635
3635

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









