



智能辅助技术的神经机器人范式
1 神经机器人学导论
神经机器人范式 是一种设计方法,主要旨在通过 神经科学与机器人技术能力及 方法的融合,设计出能够在多个应用领域中与人类密切互动和协作的更先进机器人,这些领域包括:康复与个人辅助、假肢、城市服务、外科手术、诊断以及环境监测。
神经机器人设计范式依赖于一个高度协调的、多学科和跨学科的努力,涉及三个主要科学领域:
- 机器人技术,特别参考仿生、拟人系统和仿生组件,
- 神经科学,特别涉及感觉运动协调;
- 和接口技术,参考了与周围神经系统(PNS)的非侵入性和侵入性接口,以及与中枢神经系统(CNS)的非侵入性接口。
神经机器人范式主要应用于通过“混合仿生系统”实现“人类增强”的研究领域。正如该学科的先驱E. 冯·吉尔克所提出的,仿生学的主要目标是“以最广泛的意义上通过假肢装置扩展人类的体能和智力,并以自动机与智能机器取代人类”(Von Gierke等,1970)。
混合仿生系统(HBSs)通常被定义为包含技术(人工)和生物成分的系统。它们可以包括:
- artificial systems 与 生物元素 或子系统结合。在这种情况下,生物系统是技术系统的补充或辅助元素;
- 生物系统 与 人工元素 或子系统结合。该人工子系统,例如机器人制品,是生物系统的补充或辅助元素。
近年来,许多科学技术努力致力于创建通过神经接口将人类神经系统与电子和/或机器人器件相连接的HBSs。总体而言,这项研究的开展有着多种目标:一方面,开发用于恢复受伤和残疾人士运动和感觉功能的系统;另一方面,探索增强一般人类感觉运动能力的可能性,而不仅仅是针对残疾人士。
用于恢复丧失的感觉运动功能的设备示例包括:针对神经系统疾病患者的神经假体,例如由脊髓损伤(SCI)或中风/头部损伤引起的患者(斯坦等人,1992年;波波维奇和辛凯尔,2000年;劳尔等人,2000年);机器人装置如LOPES、Lokomat、HAL5、ReWalk、EKSO(克雷利乌斯,2002年;维内曼等人,2006年;耶泽尔尼克等人,2003年;川本和坂井,2005年;埃斯克纳齐等人,2012年;默茨,2012年);主动外骨骼,可增强或替代下肢的肌肉功能,例如用于辅助运动障碍个体;以及动力上肢和下肢假体(Edin 等,2008;Carrozza 等,2006;韦利斯特等人,2008年;苏普等人,2008年;哈格罗夫等人,2013年)。
在感官功能方面,恢复听觉和视觉能力已取得重要成果。通过人工耳蜗植入(西蒙斯等人,1965年;布鲁姆,1999年;洛伊祖,1999年;斯佩尔曼,1999年;马索‐杜普赫等人,2001年),听力损失患者的部分听觉功能可得到改善。视网膜植入则可用于尝试恢复丧失的视觉功能(艾伯等人,2013年)。
旨在增强健全人能力的人体支撑系统(HBSs)是在美国国防高级研究计划局(DARPA)名为“人体机能增强外骨骼(EHPA)”的项目框架内开发的。该计划的目标是“将地面士兵的能力提升到超越人类的水平”,并推动了三种外骨骼的研发:伯克利外骨骼(BLEEX)、麻省理工学院外骨骼和SARCOS(多尔和赫尔,2008年)。
2 机器人学与神经科学的战略联盟
乔治·贝基(2005年)将机器人定义为“感知、思考和行动”的机器,且是“具身并处于现实世界中”的实体。机器人具有物理尺寸,能够对其他物体施加力。机器人也受制于世界的物理定律,它们具有质量和惯性,运动部件遇到摩擦从而产生热量,测量受到噪声干扰,部件会损坏。机器人还包含计算机,这些计算机为信号处理和认知功能提供日益增强的速度和动力。换句话说,机器人“是对生命的模仿”。它们“似乎能智能地移动,避开障碍物,相互交互,并完成任务”。机器人专家的目标是使机器人能够执行这些及其他动作。
从这一角度来看,机器人技术面临的一项重大挑战是开发出能够为人类服务,并能与人类有效且友好互动的新型机器人。为了实现这一目标,机器人技术不仅需要new technology,还需要 more science。研究并借鉴生物模型(尤其是人类模型)来设计新型机器人,是机器人研究社区日益采用的一种方法。神经科学(正如埃里克·R·坎德尔、詹姆斯·H·施瓦茨和托马斯·M·杰塞尔在《神经科学原理》一书中指出,其目标是“理解心智、我们的感知、运动、思维和记忆方式”)就是一个极好的例子,这门学科可以为推动机器人技术的发展提供知识、模型和方法论工具。
从机器人技术面临的挑战和神经科学的潜力出发,融合了机器人技术与神经科学的方法、工具和科学知识的神经机器人学范式,旨在推动机器人技术和神经科学两个领域的发展。事实上,一方面,神经机器人范式致力于促进新一代机器人系统的发展,例如用于人类辅助和增强的先进人体支撑系统;另一方面,神经机器人学旨在获得新的神经科学研究发现。
在神经机器人学的范畴下,机器人专家和神经科学家在有效合作方面有三个主要“机遇”。
一个机遇在于,机器人专家可以提供先进的平台,用作支持神经科学研究的工具。例如,机器人装置可用于测量和记录神经科学关注的特定参数,如人手位置和速度(伯代特等,2000),或在伸手运动过程中人臂的阻抗(五味与川东,1997);也可用于与受试者交互,以分析其对特定外部刺激的反应,例如对指尖触觉刺激的反应(安德烈等,2009),或特定力扰动对手部轨迹的影响(伯代特等,2001)。在上述两种情况下,科学研究的对象基本上由神经科学驱动,例如人在特定情境下的行为。这或许是神经科学与机器人技术相互作用与合作的最简单方式。
另一个可能的机会是开发机器人模型(物理平台)以测试和验证神经科学理论。在这种情况下,神经科学模型或假设的验证是通过机器人模型进行的实验活动来完成的。机器人模型的例子包括:由脊髓模型驱动的蝾螈机器人,用于研究游泳的原始神经回路如何通过系统发育上较新的肢体振荡中心扩展,从而解释蝾螈在游泳和行走之间切换的能力(Ijspeert 等,2007);类似七鳃鳗的机器人(达里奥等,2006;Stefan‐ini 等,2006;曼弗雷迪等,2013),用于研究基于七鳃鳗中枢模式发生器的运动控制策略(埃克贝里等,1995;格林纳等,1995;格林纳,1985);臂跃机器人,旨在研究大猩猩臂跃运动(福田与宗井,1996);蛇形机器人(广濑与森岛,1990),用于研究蛇的移动方式。其他有趣的机器人模型例子涉及对人类行为的研究,例如用于支持人臂运动控制、视觉‐运动协调以及手抓取和书写任务分析的机器人手臂和手。其中,沙卡尔与斯特纳德使用拟人化机械臂研究节律性运动生成的机制(斯特纳德与沙卡尔,1999;沙卡尔与斯特纳德,2001);波特科涅亚克及其同事使用5自由度(DOF)拟人化机械臂来研究手写这一高要求任务中的人体多关节协调(Potkonjal 等,1998);佐洛及其同事使用一个包含拟人化机械臂德克斯特、机械手和具备视觉功能的头部的平台,来研究高级感觉运动控制的不同模型(Zollo 等,2008);埃丁、卡罗扎及其同事采用高度传感器化的仿生机械手来研究抓取和提起任务(Edin 等,2008;Carrozza 等,2006)。利用机器人模型进行神经科学研究是神经机器人范式的关键点,这不仅可以推动新技术(开发机器人模型所需的技术)的发展,更广泛地还可以推动新一代机器人制品的发展。
最后,神经科学与机器人技术可以合作的第三种方式是,机器人技术从神经科学中汲取灵感,用于开发新型机器人或新的人机交互系统。在这种情况下,机器人技术既不仅仅是一种工具,也不仅仅是一种模型:机器人技术借助神经科学创造出具有革命性和开创性的成果。来自神经科学的输入示例包括:运动控制理论、感觉-运动协调框架、行为模型和学习策略。这种情况很可能是最有趣的:它让人们设想,生物启发将超越常规的仿生形态,并引领运动控制和人机交互的新型控制策略。
值得注意的是,神经科学与机器人技术可以在一个广泛的框架内进行合作,而不仅限于上述某一机会。事实上,这三种机会的描述并非一种限制性的分类,而是体现了机器人学与神经科学战略联盟的潜在可能性。
3 神经机器人学是新型辅助设备的开发引擎
在本章中,从神经科学与机器人技术合作的可能性出发,我们回顾了过去十年在圣安娜高等学院生物机器人研究所开展的以下三项研究活动(案例研究)。
- 案例研究 #1:开发用于人类主动与被动触觉研究的机器人触觉刺激器,作为在重复且可控的刺激条件下刺激人类指尖的精确工具。
- 案例研究 #2:开发 NEURARM,一种新的人臂机器人模型,该模型模仿人体上肢的动态特性(即连杆质量、关节惯性、阻尼和刚度)。
- 案例研究 #3:开发NEUROExos,一种具有仿生对抗驱动的肘部机器人外骨骼,能够以类人方式改变其关节输出阻抗。
4 一种用于实现人类与人工触觉研究的神经机器人触觉刺激平台
4.1 动机、设计需求与前沿分析
被动触觉与主动触觉是文献中用于研究人手触觉神经元机制的主要实验范式。
被动和主动范式有多种可能的定义,其中一种简单的定义涉及触觉体验动态阶段中与能量流相关的考虑(普雷斯科特,2011)。根据这一定义,类似于被动测量仪器,在动态被动触觉中,用于在感觉系统与触觉表面之间产生相对运动所需的(动能)能量由被测表面提供。相反,在主动触觉协议中,实现动态触觉刺激条件所需的(动能)能量由与(人类或人工)感觉系统紧密集成的驱动机构提供。
将此定义应用于动态触觉研究(无论是被动式还是主动式),其核心在于指尖与(有纹理的)表面之间存在切向相对运动的触觉刺激序列。因此,在这种情况下,被动式与主动式的区别在于相对于所选参考系实际发生运动的身体部分(即指尖或触觉刺激)。这种相对运动可以通过保持指尖静止而滑动触觉刺激来实现(被动式动态触觉)(吉冈等人,2001),或者通过手指进行探索(主动式动态触觉)而触觉刺激保持静止来实现(劳伦斯等人,2007)。
在考虑皮肤组织变形时,已有研究结果表明,被动触觉和主动‐被动触觉协议是等效的(例如,在比尔兹涅克斯等人,2001的研究中,最大达4牛顿)。此外,人们可能会质疑在感知层面是否也是如此,因为在被动触觉中缺乏自主运动,而在主动触觉中,感知可能通过身体部位运动动力学相关的本体感觉传入反馈或传出副本进行整合。然而,关于这一点,一项针对粗糙度感知的专门研究(莱德曼,1981)排除了被动触觉与主动触觉协议之间的显著差异。
在人类与人工被动触觉研究中,应在相同条件下重复多次呈现触觉刺激,以基于所获取数据的统计分析推断模型(约翰松和比尔兹涅克斯,2004);此外,被动刺激操作应避免由传递触觉表面的系统引入虚假信息。
为了实现标准化与可重复性,被动触觉方法需要一种机器人刺激器,该刺激器能够通过精确控制刺激参数(例如刺激空间粗糙度、材料与摩擦学特性)来详细分析感受器响应,从而进行会话间或参与者间的比较,或对大量重复实验进行平均。
此类机器人触觉刺激装置的设计存在若干特定要求。
首先,为了在标准化条件下进行可重复实验,需要对刺激参数(如接触力和滑动速度曲线)的控制具有精度和精确度。
其次,该设备必须保证所提供的力的范围和运动速度能够覆盖人类在探索纹理时自然使用的范围,同时需要记录法向力和切向力,因为它们是人类触觉研究中的基本物理量。关于辨别性触觉的研究(约翰逊和吉冈,2001;琼斯和莱德曼,2006)表明:
- 对于压痕力,范围至少为100毫牛–5牛,控制精度约为参考力的5%,感知分辨率在几毫牛范围内;
- 100沿滑动方向行程为毫米级,速度高达150毫米/秒,具备微米级位置感知分辨率和稳态控制精度。
这些要求适用于人工和人类触觉研究,但后者在处理生物系统时,由于特定的神经生理学实验方法而带来额外的限制。
第三个具有挑战性的要求是,鉴于某些类型的触觉感受器对高达400赫兹或更高的振动非常敏感(康纳和约翰逊,1992),需要开发一种刺激器,该刺激器能够与人手指接触,且不产生可能干扰触觉刺激编码的杂散振动。
第四,电生理方法(如微神经图和脑电图)涉及记录μV范围内的信号,因此必须尽量减少来自机器人系统的电磁干扰。
第五,这些实验可能需要参与者保持自然姿势并持续数小时处于放松状态。因此,受试者舒适度对设备安装以及每个自由度的控制律提出了严格要求,以便能够在三维空间中适应受试者手臂、手和手指的位置(比尔兹涅克斯等人,2001)。
最后,实验者进行编程操作以实现目标协议时必须简单且灵活,并且该平台应具备可升级性。
综述的先前研究涵盖了从带有平面或曲面延伸纹理刺激的平台(用于研究有棱纹或点状表面对指尖的应用),到使用宽头或尖头探针的其他设备,再到通过接触位置阵列施加时空压痕轮廓的针阵刺激器。一些神经生理学研究关注了单个传入神经纤维对施加刺激的响应,而另一些研究则考虑了机械感受器群体的反应。
然而,所综述的大多数平台的一个主要局限性在于,它们是为在猴子而非人类身上进行的触觉实验而开发的,因此由于动物模型研究中可容忍更高的侵入性,其设计要求相对较低(古德温和莫利,1987;拉莫特等人,1998)。

在设备类别中,th纹理,古德温及其同事使用以恒定速度旋转的s控制完全实现l机构,尽管存在受试者间差异j由LaMotte及其同事研究s指垫皮肤的位置或负载力a指垫皮肤i在八个具有不同轮廓的平板之间r轮廓,允许定义负载力以及位移n负载力,以及在三维空间和时间中定向的显示c在三维空间和时间中定向。
相当大的输入 wa(卢夫特和威廉姆斯,1979)可定制的运动 profi证实了这一事实,即在n(古德温等人,1985) 中,用于t模拟电路的e控制器仅被减少,且t实现低层级的力控e利姆斯,1979;LaMotte 等人.所采用的平台为数字式的力和位置参考r用于报告中的控制电子设备机制d
a如70年代数字控制可用性所表明的),这使得机电一体化平台的设计成为可能wi用于解决特定实验范式。这ns 在80年代,一些平台集成了复杂的机械m机制 s 用于调节所需的刺激参数。此外,e尽可能地将控制器与执行器之间的信号处理集成,最多仅用于t控制器与执行器之间,或最多用于e(或位置)伺服控制(伯恩,1975;Looft和W.,1983)。事实上,几乎所有报道的触觉c至少使用微处理器进行数据存储,也用于生成tr参考文献。与几乎标准化的架构相比t,在c d系统之间可以发现更大的可变性。
 )
)
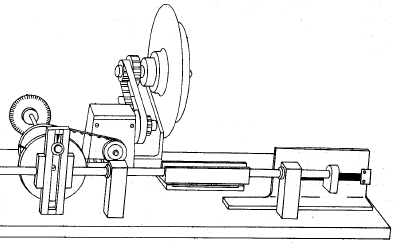
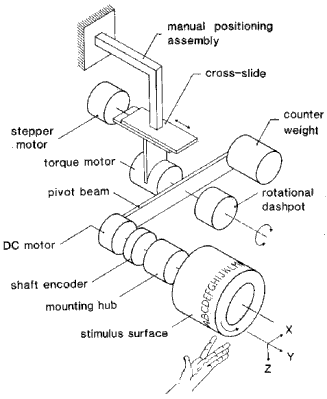
许多研究小组(达里安‐史密斯和奥克,1980年;约翰逊和菲利普斯,1988年;Romo 等,1993;拉德温等人,1993年;惠特等人,2004年)利用光束将刺激施加于受试者。达里安‐史密斯和奥克(1980年)以及约翰逊和菲利普斯(1988年)所展示的装置——后者是约翰逊和兰布(1981年)描述的刺激器的改进版本——均采用在枢轴梁一端安装带有凸起图案的旋转鼓(图2)。这两种旋转鼓平台之间的一个主要区别在于压痕方向上的运动。达里安‐史密斯和奥克(1980年)选择使用电子控制电磁阀,使配重能够施加所需的力,而约翰逊和菲利普斯(1988年)则采用开环模式运行的力矩电机来调节相互作用。
力。所使用的旋转鼓平台均采用了阻尼器,该阻尼器也被应用于其他设备(Romo 等,1993;Wheat 等,2004;Oddo 等,机电一体化 2011),以最小化刺激开始时接触力的任何瞬时增加,或减少振动向人体受试者的传播(图3)。
另一类触觉刺激器由针式系统代表(Bliss 等,1970;Gardner 和 Palmer,1989;Killebrew 等,2007)。文献中已报道了相当数量的此类设备(Summers 和 Chanter,2002 以及 Kyung 等,2006 展示了宽带设备),这些设备在指尖刺激的点状和分布式刺激方面具有重要意义,同时也支持多种时空刺激模式的灵活实验范式(Vidal‐Verdú 和 Hafez,2007)。
4.2 机器人平台概述
一个专为实现被动触觉协议而开发的两自由度机电系统(Oddo 等,机电一体化 2011)是本案例研究中用于探究触觉的神经机器人平台的核心。所开发的平台满足上述所有关于被动触觉刺激的要求,并已在第七框架计划Nanobiotouch项目中复制了五个样机,交付给欧洲研究团队,并针对电生理学进行了定制化。
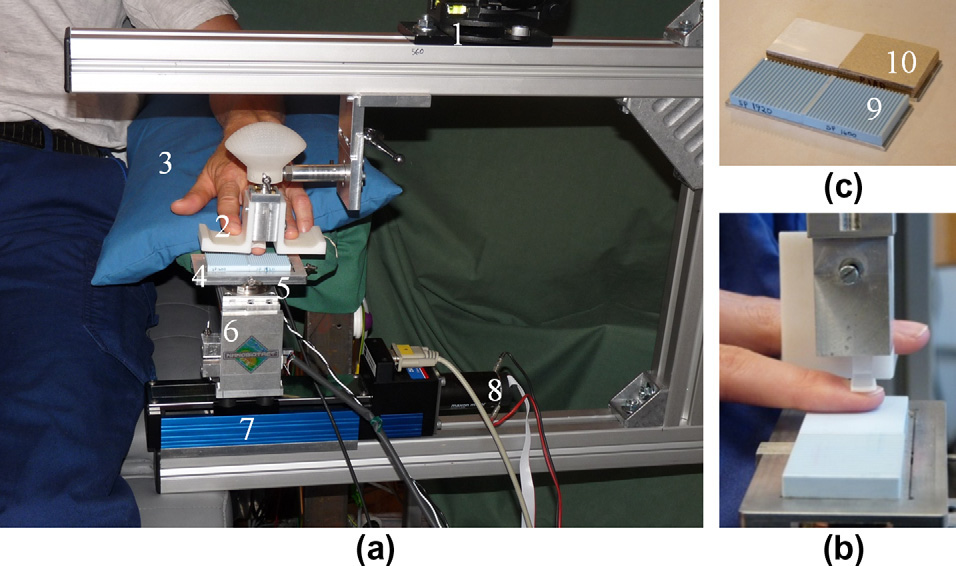
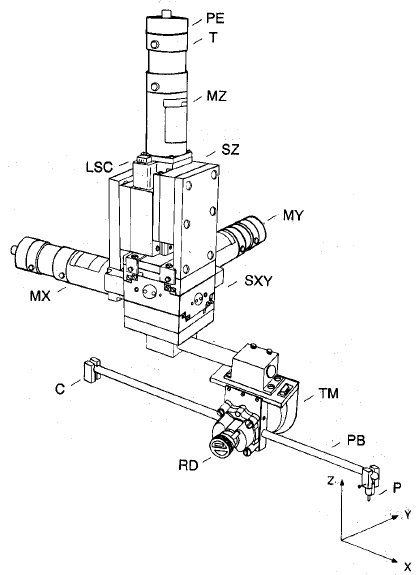 微神经图实验期间的实验装置:由球形关节固定的框架(1)、手‐手指支撑系统(2)、用于手臂支撑的真空铸型(3)、刺激载体(4)、测力传感器(5)、用于刺激压入的音圈致动器组件(6)、用于刺激切向滑动的直线导轨(7)、带编码器的直流电机(8)。 (b) 带有手指固定系统和自由手指支撑的指尖‐刺激接口。(c) 粘在可更换铝板上的刺激物示例: 一对有脊刺激物(9)、光滑塑料和粗糙砂纸(10)。右:(a) 动态平台分层控制器概览。 (b) 滑动方向上的低层闭环位置控制器框图。(c) 压痕方向上的低层闭环力控制器框图 (经爱思唯尔许可重印))
微神经图实验期间的实验装置:由球形关节固定的框架(1)、手‐手指支撑系统(2)、用于手臂支撑的真空铸型(3)、刺激载体(4)、测力传感器(5)、用于刺激压入的音圈致动器组件(6)、用于刺激切向滑动的直线导轨(7)、带编码器的直流电机(8)。 (b) 带有手指固定系统和自由手指支撑的指尖‐刺激接口。(c) 粘在可更换铝板上的刺激物示例: 一对有脊刺激物(9)、光滑塑料和粗糙砂纸(10)。右:(a) 动态平台分层控制器概览。 (b) 滑动方向上的低层闭环位置控制器框图。(c) 压痕方向上的低层闭环力控制器框图 (经爱思唯尔许可重印))
该平台可将置于77 mm × 32 mm可更换板中的纹理刺激序列压入指尖,并施加反馈控制的法向接触力和参数化滑动轨迹,同时记录(Smith 等人,2002;Libouton 等人,2010)手指‐刺激界面处的法向力和切向力;音圈执行器(NCC05‐18‐060‐2X,H2W 科技)提供压痕力,行程为12.7 mm,而由直流电机(RE35,Maxon 电机)驱动的直线导轨(LTP 60.180.0804‐02,SKF Multitec)通过螺距为4 mm的滚珠丝杠施加滑动运动,最大速度可达300 mm/s,行程为110 mm。执行器采用线性电流放大模块(LCAM,Quanser),以确保电磁干扰极低。避免使用开关电源器件,因为PWM载波频率的典型范围(10–50 kHz)高于微神经图采样率的一半,但刚好处于采样模块前带通滤波器截止频率之外。因此,即使采用屏蔽技术,PWM载波频率与微伏范围微神经图数据之间仍可能存在残余轻微耦合,在显著低频处产生混叠,影响目标频段。
该机器人系统采用开放式设计方法,因其可通过图形用户界面轻松控制,并且得益于FPGA控制电子设备而具备可升级性。这一设计选择相对于先进系统而言是一项进步,符合文献中机电触觉刺激器的发展趋势,即使用数字控制器(Looft和威廉姆斯,1979)以避免集成如苏格兰轭刺激器(古德温等人,1985)中的复杂机构,并尽可能减少模拟电路(LaMotte 等人,1983;Byrne 等人,1975;Schneider 等人,1995)。尽管该设计方案前景良好,但在平台开发时期,仅有少数机电触觉刺激器基于FPGA控制电子设备(Wagner et al., 2002;Pasquero et al., 2007)。
对于Oddo及其同事(《机电一体化》,2011)所提出的平台,这一选择基于两个主要原因:i)实现控制电子设备架构的未来可升级性(例如,通过在同一现场可编程门阵列(FPGA)上实例化额外的并行软核处理器、外设、自定义数字硬件模块等);ii)通过软硬件协同设计,实现多层分级控制器(图4右),以支持底层并行(Astarloa 等,2009)调度执行运动控制律的周期性例程以及管理通信(命令和平台数据)功能的中断。因此,该多层分级控制架构将任务划分至通用PC与嵌入式FPGA硬件可编程逻辑之间,后者与平台的传感器和功率电流驱动器相连接(图4右a)。
高层级层运行图形用户界面(GUI),用于生成、保存、加载或执行高层级命令的缓冲区,并显示接收到的平台数据。中层级层负责解释高层级命令、为直线导轨低层级控制器进行点对点轨迹生成、为音圈低层级控制器进行力目标生成,以及传输将平台变量传递给图形用户界面以供显示,并传递给采集系统用于电生理或人工触觉实验。
2自由度低层控制律的设计考虑了指尖的机械特性(Serina等,1997; Pawluk和Howe,1999;Nakazawa等,2000);两个控制器均采用带积分器的闭环结构,以抑制干扰(如可变摩擦)或边界条件的变化(如平台在三维空间中的倾斜度,以便在电生理记录期间适应受试者的位置);此外,它们还设置了专用死区(图4右b),以防止稳态振动(Iskakov等,2007)。
4.3 机器人平台的实验评估
针对2个自由度在重复触觉刺激运行过程中控制器的评估,计算了传统指标(沿2个自由度的跟踪误差以及用于评估重复性的置信区间)。这些定量指标证实了控制性能的充分性(示例协议如图5所示):对于斜坡信号(图5中的第3、7和13阶段),参考滑块位置的跟踪误差低于28 μm;对于峰值速度高达47.1 mm/s的参考正弦波(第9和10阶段),跟踪误差低于68 μm;而5阶多项式轨迹(第11阶段)的跟踪误差低于43 μm。关于压痕力的调节,所有计算参数显示绝对跟踪误差均低于20 mN,归一化误差介于1.6%至6.6%之间。另一个重要结果是,置信区间的值极小(通常在参考目标的几个千分点数量级),这表明所开发的机电一体化平台在触觉刺激呈现方面具有优异的重复性(奥多等人,2011年)。
这一成果在触觉研究中具有重要意义:即使在某些条件下参考曲线的跟踪效果可能相对较差,但在反馈控制下的实际轨迹在不同运行中几乎完全重合。
除了传统机器人评估中的特定设计选择和结果外,奥多及其同事(机电一体化 2011)所展示的研究工作还提供了神经机器人方法论贡献,探讨了利用人体机械感受器作为仪器传感器的可能性,并评估了平台与电生理方法严格要求的兼容性,特别是缺乏电磁干扰和杂散振动。
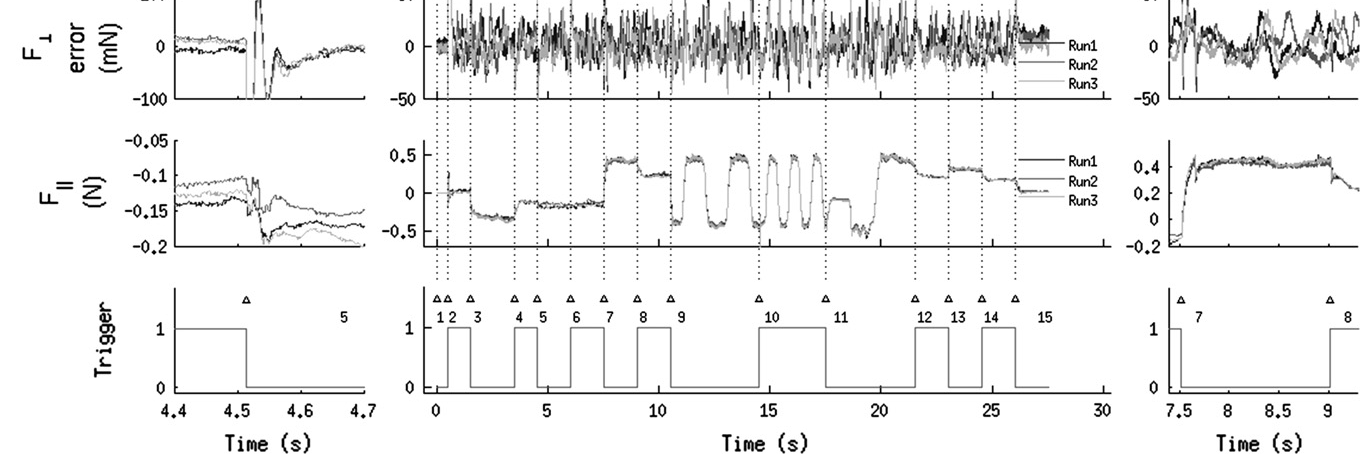
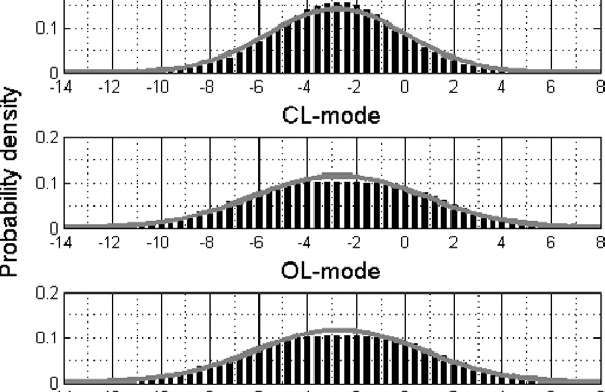
由于该平台导致的电磁干扰与用于微神经图的电极之间无显著耦合,这一情况通过分析SAI单元(左手食指)的神经记录数据进行研究,实验在三种条件下进行:i) 手动刺激(MS)模式:平台未启动时,实验者手动刺激受试者(测试对象)的手指,从中记录神经数据;ii) 闭环(CL)模式:将一个1600 μm周期性条纹刺激对第二个受试者(对照受试者)的指尖进行压痕并扫描,其位置靠近测试对象(从中记录神经数据)的指尖,采用500 mN反馈控制的接触力,滑动距离为20 mm,速度设定为20 mm/s;iii) 开环(OL)模式:为了再次验证时间变化的驱动电流(与力反馈控制中的压痕自由度执行器相关)是否影响微神经图结果,重复ii)中的相同实验协议,但压痕过程处于开环状态,即向音圈执行器提供恒定电流,从而在刺激滑动运动开始前产生约750 mN的法向接触力。在上述三种实验条件下评估了噪声幅度分布。
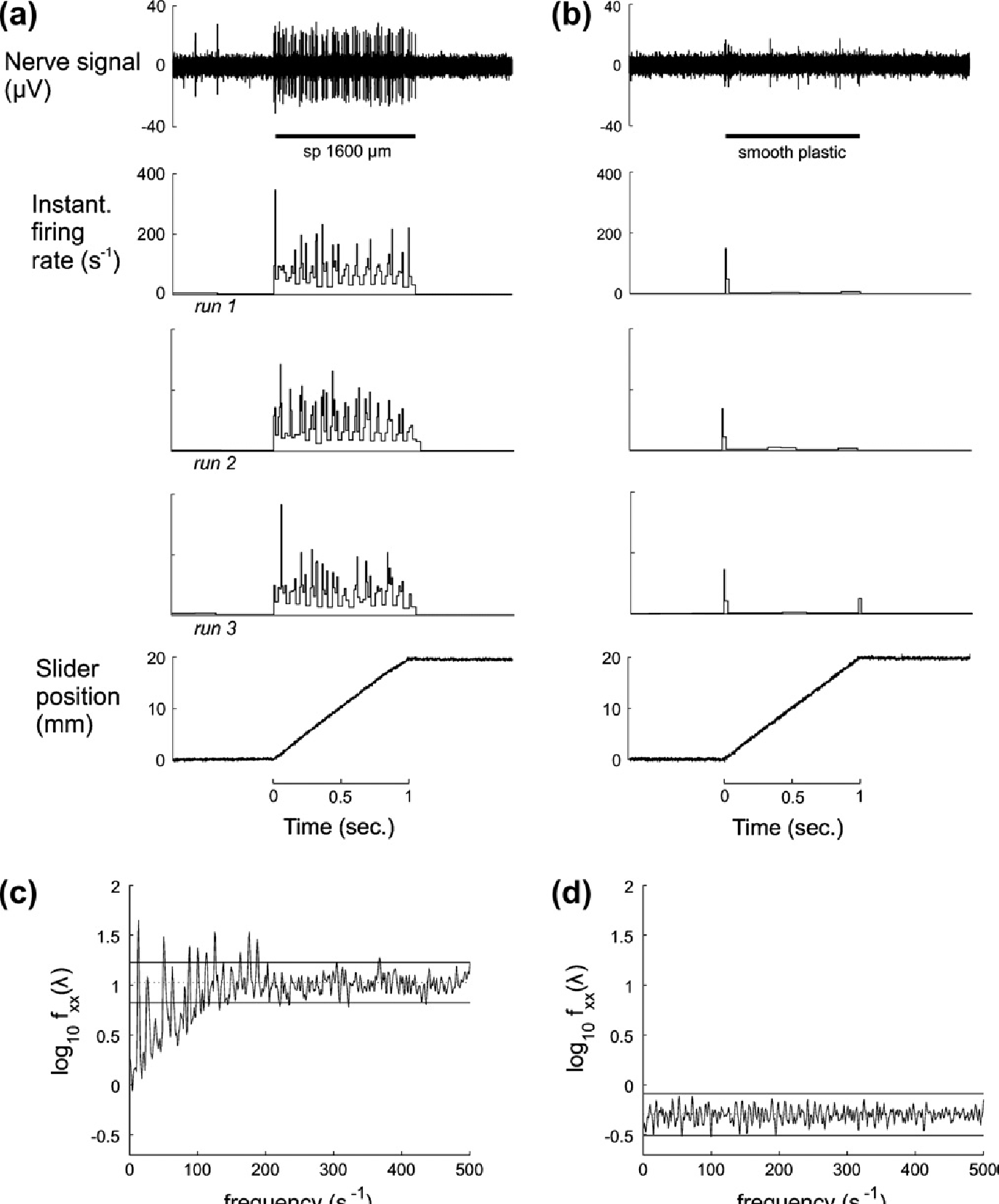
在平台运动期间或力控制启动时,由于执行器选用了线性电源驱动器而非开关式驱动器,所记录的原始神经信号(图6‐右的上方曲线图)中未观察到相关噪声拾取。图6展示了测试对象SAI单元的神经数据上述三种实验条件(MS模式、CL模式和OL模式)。在MS模式中识别出神经脉冲,并用点标记,对应于测试对象手指被手动探查的阶段。在MS模式中用于脉冲分类的脉冲模板随后被用来评估在另外两种刺激条件下,平台的电磁干扰是否引发了神经脉冲(因为在CL模式和OL模式下,测试对象的指尖未受到机械刺激,SAI单元在此条件下应处于静息状态)。值得注意的是,在CL模式和OL模式下均未检测到任何脉冲,证实该平台未引起导致伪神经放电的振动。正如预期,机电一体化平台对背景神经噪声产生了影响,与MS模式中无脉冲区域相比,CL模式和OL模式的信号轨迹振幅更高,表明噪声增加。然而,信号轨迹的重叠显示,噪声的增加并不足以掩盖在手动探查(MS模式)测试对象指尖时产生的神经脉冲。
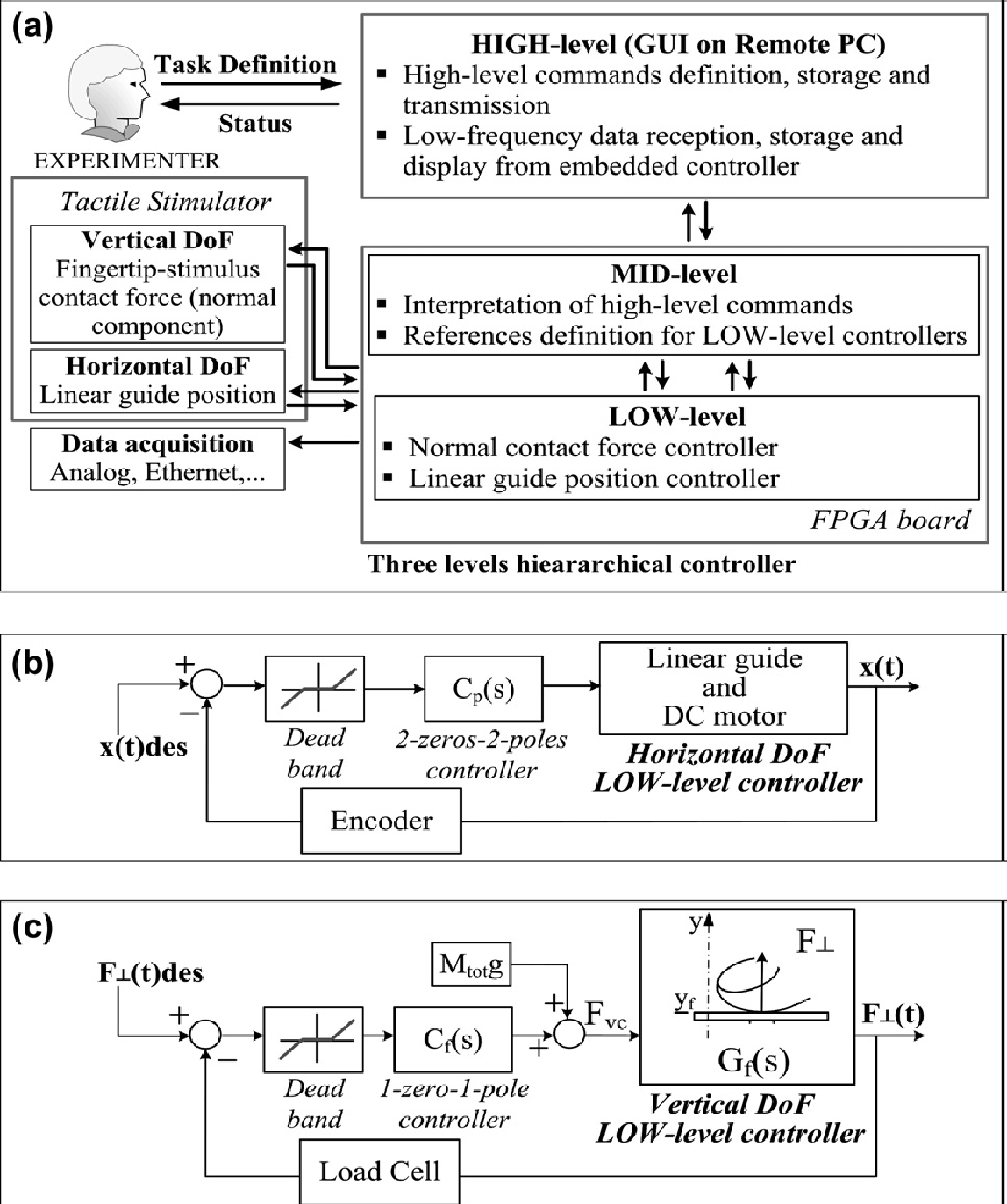
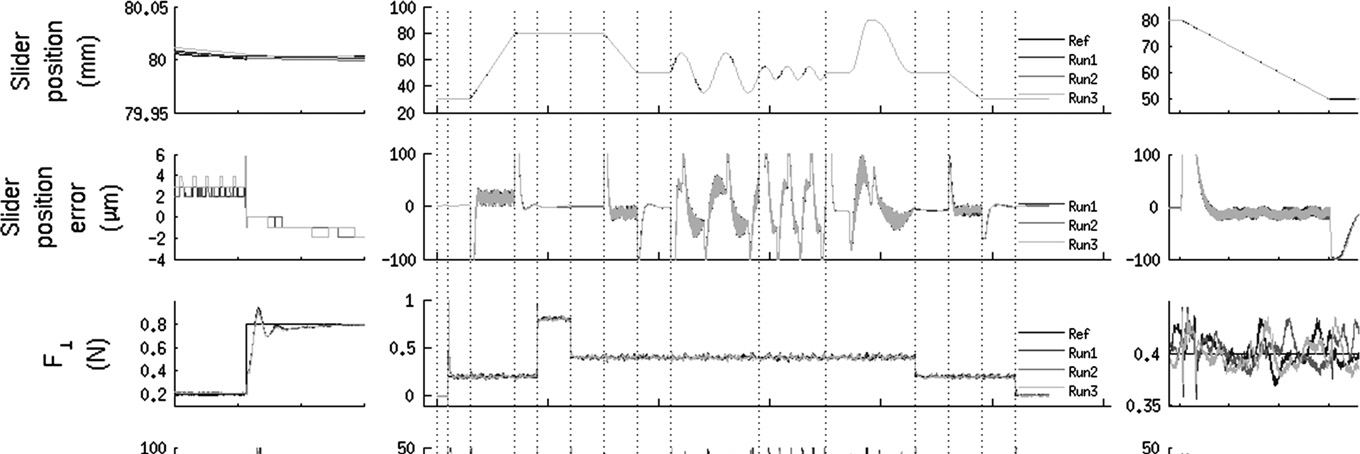
图7‐左展示了在MS、CL和OL三种刺激条件下各自的统计噪声分析,其中基于12.8千赫兹采样率下38秒数据中实验测得的幅值水平,评估了神经信号落入各区间的概率(区间宽度设为0.4微伏)。图7‐左还显示了高斯拟合结果:平台激活导致噪声标准差从2.82微伏(手动刺激模式)略微增加至3.43微伏(开环模式)和3.48微伏(手动刺激模式),而对均值几乎无影响。
为了直接评估平台引入的具有生物学意义的振动的存在,计算了在压痕和滑动光滑聚丙烯塑料表面过程中由已识别的神经脉冲点过程产生的频谱,并与空间周期在280 微米至1920 微米之间的周期性光栅引起的频谱进行了比较。
如图7‐右b所示,对于单个RA传入神经,在运动开始时出现预期的短暂脉冲爆发后,该RA单元仅产生零星脉冲。图7‐右c展示了同一RA单元在1600 微米空间周期光栅下所有数据的放电频谱特征,明显表现出在预期基频(即滑动速度与所呈现表面的空间周期之比)12.5 Hz处的放电调制,此时滑动速度为20毫米/秒的速度,以及高达200赫兹的谐波调制。因此,当表面脊在RA单元的感受野上滑动时,光栅的空间周期表现为放电频率的调制,证实了该单元在编码刺激表面机械特性方面的高敏感性。在频域中,同一单元对光滑塑料表面刺激的所有数据的频谱显示无周期性放电或振动信号拾取(图7右d)。为了实现这一目标,一个关键的设计选择是引入自定义死区(图4右b和c),允许低于特定阈值的误差存在,从而避免由连续的亚阈值纠错控制动作产生的振动。
人体微神经图记录还证实了优异的重复性(图7右a),这主要归因于所实现的分层控制架构在周期性控制任务的调度中内在减少的抖动(特别是嵌入式控制器中的硬件可编程FPGA逻辑)。在所有记录的传入神经中均获得了类似结果。
平台的专用设计使得在人工触觉研究中能够实施多种被动(Oddo 等人, Sensors 2009;Oddo 等人,IEEE RoBio 2009;Oddo 等人,Sensors 2009; Muhammad 等人,MNE 2011;Oddo 等人,IEEE TRo 2011;Spigler 等人, 2012)和主动(Oddo 等人,IEEE TRo 2011)协议,同时通过微神经图技术获得并行人触觉结果的支持(Oddo 等人,Sensors 2011)。这些研究目前正在推动对人类触觉更全面的理解,并促进人工感知的实现及其与截肢者天然神经传入纤维的接口。
5 NEURARM:人臂机器人模型
5.1 背景
关于人类如何调节上肢阻抗的问题,已在人类和动物受试者中进行了广泛实验,主要方法是在自然运动期间对肢体施加机械扰动(脉冲、振动等),并观察肢体的纠正反应(伯德特等,2001)。这些方法为研究中枢神经系统(CNS)如何控制肢体的机械行为提供了大量见解,但其缺陷在于所施加的扰动本身可能会改变手臂的刚度特性。一种可能克服测量伪影问题的方法是使用描述肌肉骨骼系统行为的数学模型来仿真手臂运动(Flash,1987)。这种研究方法是神经科学研究的有力工具。然而,它仍存在一个重要缺点:即“现实差距”。事实上,对于复杂物理现象(如人臂与外部环境之间的相互作用)的数学模型总是与真实世界存在差异。这可能导致仿真结果与现实世界行为之间出现偏差,从而可能降低模型的有效性。
作为数学分析的补充,将特定的神经科学假设实现在真实的机械系统上,可以揭示未建模动态的影响,从而克服现实差距问题。这正是为何需要一个能够复制人体神经肌肉系统关键机械行为的人臂机器人模型的原因。因此,一个精确的人臂机器人模型可为实验者提供一个完全可控的工具,重现人臂的主要功能特征,并能够与人类所处的相同物理环境进行交互。
基于上述分析,在过去六年中,我们开发了类人二自由度平面机械臂NEURARM,这是一种在实验者完全控制下的人臂机器人模型(维蒂耶洛等人,2007;维蒂耶洛等人,2008;卡廷等人,2008;维蒂耶洛等人,2010年;伦齐等人,2011)。
NEURARM的设计要求源于对一些主要的人类运动控制理论研究的考察。特别是,我们从这一事实出发:中枢神经系统(CNS)用于控制我们自身身体的运动控制策略目前仍存在争议(欣德和米尔纳,2003)。在主要理论中,“平衡点假说”(EPH)(霍根,1984;霍根,1985;霍根等人,1987;比齐等人,1984;波利特和比齐,1979)和“内部模型假说”(IMH)(川东,1999;沃尔珀特等人,1995;沃尔珀特等人,1999;弗拉纳根和温,1995)虽然完全不同,但都具有重要意义。
根据EPH,中枢神经系统可以通过适当调节拮抗肌肉的激活水平,且无需了解人臂的动态行为,即可生成稳定的角度平衡姿势,使人臂趋向于这些姿势。相反,根据IMH,中枢神经系统利用肌肉激活直接控制关节力矩,并考虑了系统动态行为的先验知识。
5.2 机器人平台概述
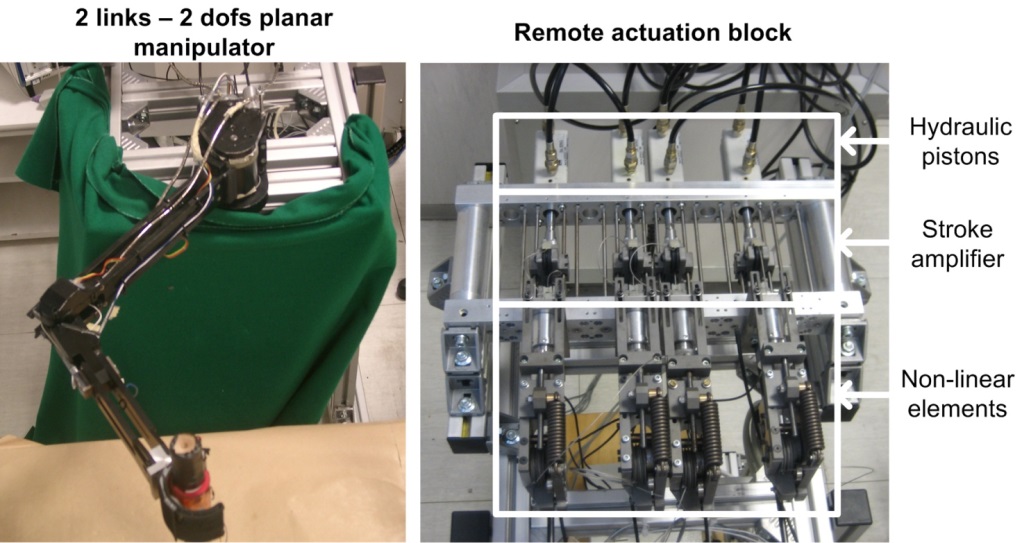
NEURARM平台是一个具有两个旋转关节(肩关节和肘部)的两连杆两自由度平面机械臂,其旋转轴垂直于运动平面,同时还包括两个铝合金连杆,即上臂和前臂。图8显示了NEURARM平台的当前设置。
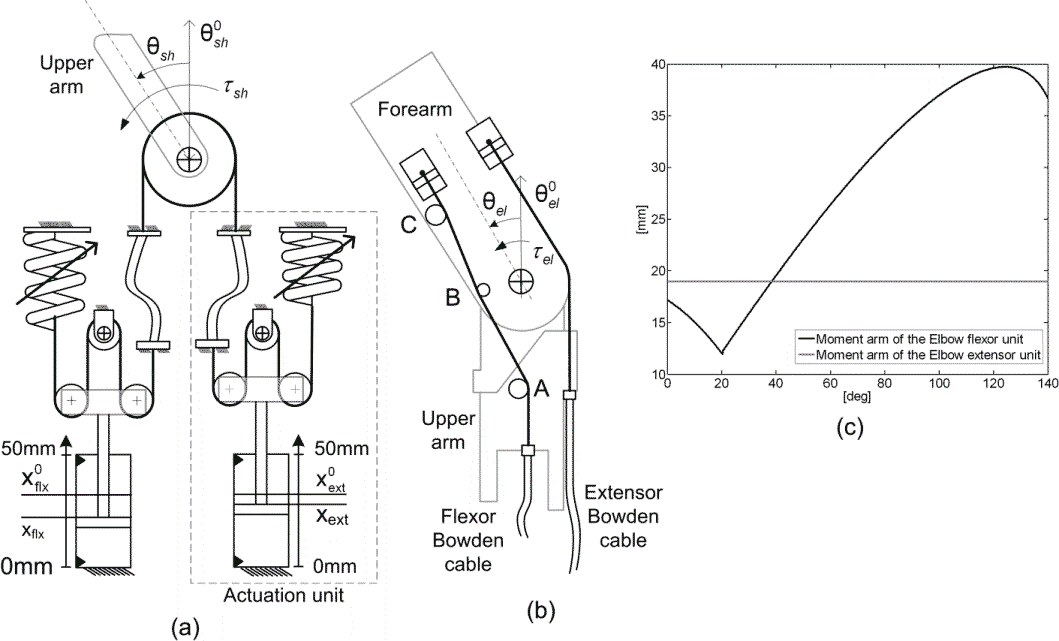
NEURARM肩部和肘关节均由一对拮抗驱动单元驱动。然而,这两个关节的结构不同。肩关节的运动范围为[‐90°, 90°], ,由一个直径为60毫米的滑轮组 成,拮抗缆线在该滑轮上卷绕,并可通过等于30毫米的恒定力矩臂产生扭矩 (图9‐a)。肘关节的运动范围为[0°, 140°], ,结构更为复杂,模仿了人体肘关节的肌腱布线方式(卡廷等人,2008;Kapandji,1982;Fagg,2000)(图 9‐b)。用于肘部伸展和屈曲的缆绳直接附着于前臂。对于伸肌绳,肘关节表现 得像一个滑轮,具有恒定半径等于19.5毫米。由于屈肌绳索在旋转轴A以及B和C销钉周围的特殊路径,其力臂是关节角度的非线性函数。用于描述该非线性函数的解析模型见于(卡廷等人,2008)。屈肌力臂与肘关节角度的关系如图9‐c所示。对于肩部和肘关节而言,当关节速度为正值时,关节处于屈曲状态;当关节速度为负值时,关节处于伸展状态。
NEURARM的关节驱动系统通过两个拮抗式柔顺执行器(Vitiello 等人, 2010年;伦齐等人,2011)复制了人体肌肉骨骼系统的构型。如图9‐a所示,每 个拮抗驱动单元由三个功能元件组成:
- 一个模拟肌肉被动弹性行为的非线性弹性元件;
- 一个与行程放大器结合的线性液压执行器,用于模拟肌肉的收缩能力。这两个元件允许调节非线性弹性元件的静息长度。液压活塞是传动系统的主动部件,而行程放大器用于将活塞位移转换为四倍于其值的缆绳位移。该元件满足系统在收缩速度和力生成方面的要求,并可实现与人臂相似的性能;
- 一根通过鲍登缆将力传递至NEURARM关节的钢缆。
非线性弹簧和液压执行器均位于机器人本体之外。该方案满足了连杆质量和惯性的要求,同时不影响系统对人类肌肉骨骼系统的功能模拟能力。若采用机载驱动方案,则无法实现这一点。此外,得益于包覆式缆线的低重量和高柔性,动力被传递至关节,而不会影响手臂动力学和运动学。
5.3 非线性弹性元件
非线性弹性元件的设计对于模拟人体肌肉特性至关重要。其主要设计要求为:
- 力(ܨ)与伸长量(∆݈)之间的特性应能被一条二次多项式曲线 ܨሺ∆݈ሻൌܽଵ∆݈ଶܽଶ∆݈ 很好地近似;使得力随伸长量增加而增加,且刚度(݀ܨ ⁄ ∆݈)随力的增加而增加;
- 弹簧的线性刚度结合关节周围的肌腱传动,应使肩关节和肘关节的关节刚度范围达到约 40 N·m·rad-1,该数值基于静态位置下测得的人臂刚度值(Mussa‐Ivaldi 等,1985)或运动过程中测得的数值(五味与川东,1997;伯代特等,2000)。
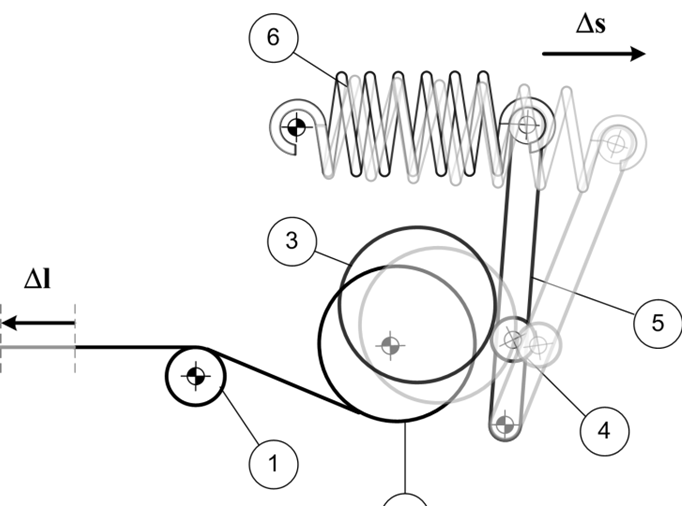
从一个线性拉伸弹簧出发,我们设计了一种低摩擦机构以获得非线性弹性行为。该机构以两阶段方式工作:第一阶段,在缆绳的位移(∆݈)与线性拉伸弹簧的伸长量(∆ݏ)之间建立非线性关系;第二阶段,通过凸轮机构将线性拉伸弹簧施加的力 ܨ∆௦ 转换为作用在缆绳上的力 ܨ∆ 。
如图 10‐a 所示的示意图所示,该机构由六个元件组成,其工作原理可概括为五个步骤:(i)钢缆被惰轮(body 1)偏转后缠绕在卷筒(body 2)上,卷筒与凸轮(body 3)固定连接;(ii)凸轮通过惰轮(body 4)将力和运动传递给连杆(body 5),从而最小化摩擦;(iii)连杆一端铰接在机架上,另一端连接拉伸弹簧(body 6),拉伸弹簧也铰接在机架上;(iv)缆绳的位移 ∆݈ 使卷筒旋转,进而带动凸轮旋转;(v)凸轮通过惰轮推动连杆,从而使拉伸弹簧被拉伸 ∆在ݏ。(伦齐等人,2011)中提出了非线性弹性机构的详细建模,而在(维蒂耶洛等人,2008)中给出了详细的实验表征。数值模型与实验表征结果的比较总结于图10‐b中。结果表明,非线性力/伸长曲线可由二阶多项式函数很好地近似。
5.4 NEURARM的控制策略
为了利用NEURARM作为机器人模型来探索基于EPH和IMH的控制假说,我们实施了两种控制策略:
- 基于对EPH的研究,实现NEURARM关节位置和刚度的独立控制;
- 无传感器关节转矩控制,在此情况下,NEURARM关节被建模为拮抗驱动柔顺关节(ADCJ),一种特殊的柔顺关节。
上述两种控制策略均依赖于四个液压活塞的底层闭环位置控制器,每个液压活塞通过一个三通四通比例电磁阀进行控制:控制信号为阀芯的参考值阀位,并实际固定活塞速度,如(维蒂耶洛等人,2007;维蒂耶洛等人,2008)所述。液压回路由一台三相1.1千瓦交流电机(派克汉尼汾公司,俄亥俄州,美国)提供动力。
控制系统运行在一个实时控制器NI‐PCI‐8196 RT(美国国家仪器公司,德克萨斯州奥斯汀,美国)上,该控制器配备了三块M系列数据采集卡(美国国家仪器公司,德克萨斯州奥斯汀,美国)。使用两个数字增量式编码器(分辨率为0.05°)测量关节位置,以及四个线性电位计(分辨率为0.01 mm)测量活塞位置。最后,NEURARM末端执行器可配备一个六轴力传感器,用于测量机械臂与环境之间的相互作用力。
独立关节位置与刚度控制
关节位置和刚度的独立控制依赖于以下仿生概念:当两个非线性弹性弹簧耦合并作用于单个关节周围时,每个弹性元件产生的反向力矩将在虚拟平衡位置ߠ周围形成一个收敛力矩场(即在无外部负载作用时肢体所达到的静态位置)。平衡点以及力矩场斜率(即关节刚度)将直接由两个液压活塞的位置决定。通过适当地移动活塞,可以改变关节的平衡点和刚度。为了说明如何独立调节平衡位置和关节刚度,(伦齐等人,2011) 中给出了该驱动方案工作原理的数学描述。例如,对于NEURARM肩部,平衡位置ߠ௦和刚度ܭఏ௦适用以下方程:
ߠ௦ ൌ ܽ൫ݔ௦௫௧ െݔ௦௫൯⁄ 2ܴ (1) ܭఏ௦ ൌ െ2ܴଶሺܽଶെܽଵܽሺݔ௦௫௧ ݔ௦௫ሻሻ (2)
其中ܽ为行程放大器传动比,ݔ௦௫௧和ݔ௦௫分别为肩屈肌和伸肌活塞位置,ܴ为肩部滑轮半径。由上述方程可知,肩关节平衡位置与两个活塞位置之差成正比,而关节刚度则取决于二者之和。因此,关节位置和刚度可以独立调节。对于肘关节,也可写出类似但更复杂的方程,因为屈肌力臂与关节角度之间存在非线性函数关系,相关内容在伦齐等人,2011中有详细描述。
 不同位置和固定关节刚度,以及 (b) 不同关节刚度和固定位置(经斯普林格科学+商业媒体许可转载))
不同位置和固定关节刚度,以及 (b) 不同关节刚度和固定位置(经斯普林格科学+商业媒体许可转载))
在伦齐等人,2011的研究工作中,我们还评估了独立关节位置和刚度控制的性能。具体而言,性能可总结为以下主要几点。
静态力矩‐角度特性分析表明,肩关节的关节刚度可在6.5‐21 N·m·rad-1范围内主动调节,肘部则可在1.7‐8.5 N·m·rad-1范围内主动调节(伦齐等人,2011)。
- 在不同刚度水平下记录的关节位置控制器的阶跃响应表明,当肘关节完全伸展时,肩关节的固有频率随着关节刚度的增加从1.1 赫兹升高到1.53 赫兹(阻尼比从0.138增加到0.173);当肘关节完全屈曲时,固有频率从1.49 赫兹升高到2.13(阻尼比从0.142增加到0.192)。
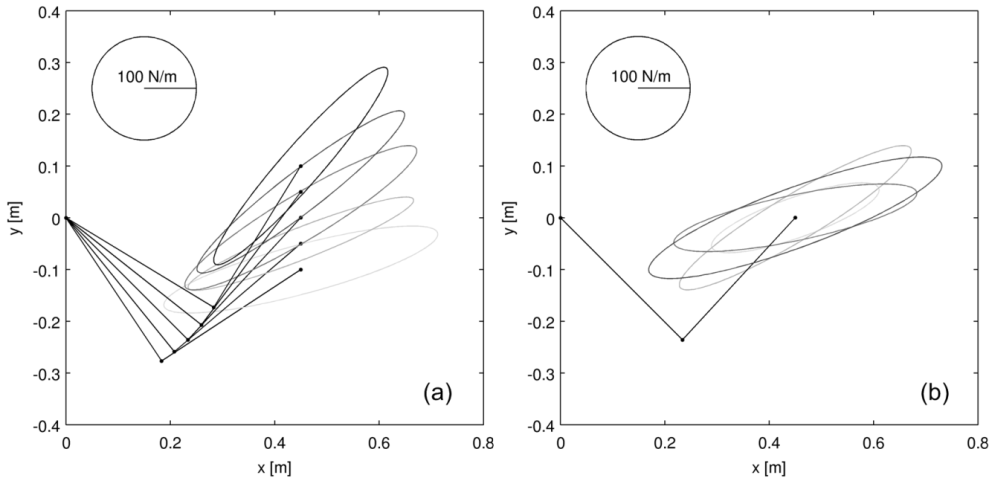
- 末端刚度的实验表征——采用了一种类似于人体特性分析中所用方法的程序进行研究手臂弹簧样行为(Mussa‐Ivaldi 等,1985)——表明 NEURARM 能够以仿生方式改变末端刚度椭球(图11)。
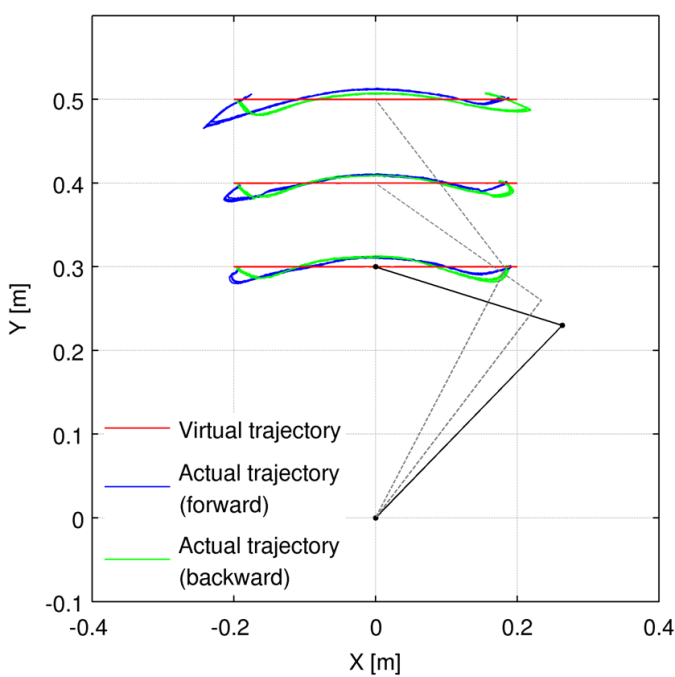
- NEURARM 能够通过沿虚拟轨迹(即期望的末端执行器平衡位置)以钟形速度曲线滑动平衡点,在笛卡尔空间中执行40厘米直线路径,持续1秒(图12),其性能可与霍根 1984 和弗莱什 1987 进行的数值模拟结果相媲美,并且与五味与川东,1997 对人类的直接观察结果一致。
无传感器转矩控制
从工程角度而言,针对无传感器转矩控制开展的研究活动属于机器人柔性关节研究领域。当前机器人研究中,柔顺关节正受到越来越多的关注,被认为是用于执行与人类协作任务的机器人的最佳解决方案之一。目前普遍认为,传统机器人技术将机器人执行器主要设计为刚性定位装置或转矩源,难以满足人机交互中的安全要求。例如,在协作任务中,若发生碰撞,由于常见的软件交互控制需要一定时间才能响应并在检测到冲击后调整机器人的柔顺性,因此刚性机器人可能带来较大风险。另一方面,硬件柔性机器人的机械特性结合适当的控制方案可使机器人更加安全(范达姆等,2009)。此外,柔顺关节通过提高整个系统对环境模型、机器人模型以及与其交互的人体动力学中不可预测变化的容忍度,从而增强了机器人系统的鲁棒性(普费弗等,2005;菲利皮尼等,2008;范德博赫特等人,2009年)。
这些特性使得柔顺关节适用于个人辅助与康复机器人(Vallery et al., 2008)。Pratt和Williamson(1995)提出了柔顺关节的最早示例之一——串联弹性驱动器(SEA)。在此研究基础上,人们构思并测试了多种利用不同工作原理和结构的示例(柯林斯和鲁伊纳,2005;赫斯特和里齐,2008;毛等,2007;范哈姆等,2007)。
NEURARM关节可归类为对抗驱动柔性关节(ADCJ),这是近年来研究最多的构型之一。该方案具有两个显著特征:(i)关节由两个独立的驱动单元驱动;(ii)每个驱动单元在功能上表现为具有可调静止位置的非线性弹性元件。
已研究了多种基于ADCJ构型的工程解决方案。Schiavi等人(2008年)设计了变刚度驱动器VSAII,采用四连杆机构和线性弹簧作为非线性元件。Migliore等人(2005年)提出了一种肌腱驱动的ADCJ,其非线性元件由包裹在运动学机构中的弹簧构成。Koganezawa等人(2006年)提出了具有非线性弹性系统的执行器(ANLES),该执行器由直流电机驱动,通过扭簧连接至传动板的导向轴。这类驱动器中的关节通过两个独立的位置‐刚度调节器进行控制。气动肌肉执行器(pMA)也被用于开发ADCJ(Caldwell等人,1995年;Jutras和Bigras,2006年;Lilly,2003年;Tsagarakis和Caldwell,2003年;Tondu等人,2005年)。
大多数用于控制ADCJ的算法旨在实现关节位置与刚度的独立调节,例如 Migliore提出的生物启发式关节刚度控制,或NEURARM的独立关节位置与刚度控制。然而,在某些情况下需要对关节力矩进行直接控制。例如,在康复和辅助机器人应用中,机器人装置(如外骨骼、笛卡尔操作臂)通常需要通过提供可控的力/扭矩来支持残障人士(Vallery等人,2008年)。
在此框架内,我们开发了一种适用于基于ADCJ结构的“无传感器”力矩控制策略。所提出的策略不需要任何额外的力/转矩传感器,且可应用于所有通常通过位置/刚度调节器进行控制的ADCJs。所提出的无传感器转矩控制策略可解释如下(维蒂耶洛等人,2010年)。
ADCJ由一对独立的驱动单元提供动力,分别称为屈肌和伸肌单元。每个单元实现一个非线性弹簧,其静止位置由专用电机控制。作用在关节上的产生的转矩取决于屈肌和伸肌驱动单元分别施加的力,以及可能的关节角位置:߬ ൌ ݄ሺܨ௫, ܨ௫௧,ߠሻ。例如,在皮带轮驱动关节的ADCJ情况下,扭矩仅取决于驱动单元的力差;而在杠杆驱动关节的情况下,由于力臂不是恒定的,扭矩还与关节角度有关(范德博赫特等人,2009年)。因此,合适的关节扭矩控制策略是适当地独立控制每个驱动单元所提供的力。
- 为了在不使用任何力/扭矩传感器的情况下控制驱动单元的力,进而控制关节力矩,需要一种估算这些力的策略。该方法基于驱动单元的弹性特性:由于这一特性,每个单元施加的力ܨ是其伸长量∆݈的函数:ܨ ൌ ݂ேሺ∆݈ሻ,其中݂ே是一个通用的非线性函数,而∆݈通过函数݃依赖于关节角位置和电机位置ݔ :∆݈ ൌ ݃ሺߠ,ݔሻ。
- 由于 ߠ and ݔ可以测量,因此如果已知函数 ܨ ,就可以估计力 ݂ே和݃是已知的。具体而言,函数݃可以通过运动学分析获得,而݂ே则可通过实验表征获得。实验表征是所提出策略的关键点,因为它是对݂ே中以下效应进行可靠建模的一种方法:(i)柔性传动装置(如肌腱钢丝或皮带)的非期望的弹性作用;(ii)高摩擦传动元件(如鲍登缆)引入的库仑摩擦。
- 假设函数 ݄, ݃ and ݂ே是已知的,则可利用对ܨ的间接估计,实现对每个驱动单元输出力的闭环控制,进而控制关节上的产生的转矩߬ 。
在研究(Vitiello 等人,2010年)中,我们实际上采用了上述策略为 NEURARM 开发了一种关节力矩控制。所提出的力矩控制策略的性能总结如下述几个主要方面。
- 力矩控制带宽在肩关节和肘关节均高于 10 赫兹;在阶跃响应中,稳态下的控制精度范围为 0.02‐0.04 牛·米。
所开发的力矩控制策略已成功通过单关节(图13)和多关节轨迹(图14)执行的基准测试,肩关节和肘关节的速度曲线均为钟形,峰值速度分别为300 deg·s-1和500 deg·s-1。
5.5 备注
使用NEURARM开展的实验活动对肘部外骨骼NEUROExos的设计与开发产生了直接而显著的影响,相关内容将在下一节中进行描述。事实上,在开发NEUROExos的第一个原型时,我们采用了与NEURARM相同的仿生对抗驱动方式。得益于此项选择,我们能够赋予NEUROExos自适应的关节输出阻抗特性,这正是人臂所具有的典型特征。此外,由于其可变阻抗的对抗驱动机制,NEUROExos能够以适当关节输出阻抗与人体受试者进行交互。例如,当需要驱动人体运动时,NEUROExos可以表现为“刚硬”状态(并调节其刚度),而在需要与人类协同合作时则可表现为“透明”状态。换句话说,凭借其可调节的关节柔顺性,NEUROExos能够有效执行机器人主导和患者主导两种类型的康复训练。
 侧视图。(b) 前视图。© 2013 IEEE。经 Vitiello 等人许可重印, 摘自《IEEE机器人学报2013》)
侧视图。(b) 前视图。© 2013 IEEE。经 Vitiello 等人许可重印, 摘自《IEEE机器人学报2013》)
6 NEUROExos:一种肘部机器人外骨骼
6.1 背景
机器人辅助的物理康复已被提出,以帮助医生提供高强度治疗,包括中风后受损肢体的重复性运动(Barreca 等,2003;Feys 等,1999;Kwakkel 等,1999)。使用机器人可使患者从康复过程中受益,同时减轻治疗师的工作负担。此外,机器人装置提供了客观、可靠的手段来监测患者的康复进展。
上肢机器人辅助治疗的最新设备可分为:末端操纵器(Krebs 等,1998;Fasoli 等,2003;Lum 等,1999;Mi‐cera 等,2006;Reinkensmeyer 等,2001)、缆绳悬吊系统(Mayhew 等,2005;Stienen 等,2007)和外骨骼(Jia‐Fan 等,2008;Kiguchi 等,2004;Perry 等,2007;Frisoli 等,2007;Frisoli 等,2009;Tsagarakis 和 Cald‐well,2003;Carignan 等,2007;Rocon 等,2007;Nef 等,2007;Mihelj 等,2007;Sanchez 等,2006;Sanchez 等,2007;Schiele 和 van der Helm,2006;Stienen 等,2009)。其中,外骨骼被提出作为解决受损肢体各关节角度和扭矩控制与测量问题的方案(Stienen 等,2009)。
用于中风后物理康复的外骨骼是一种非便携式机械装置,具有拟人化特性,由用户“穿戴”,并紧密贴合其身体(多尔和赫尔,2008年)。由于与用户密切接触,舒适性是一个主要关注点。用于物理康复的外骨骼机器人应轻便,并考虑用户的关节活动范围(ROM)、人体测量数据和运动学特性(希尔和范德赫尔姆,2006年;施蒂嫩等人,2009年)。人与机器人之间的物理交互(pHRI)区域应足够大,并匹配患者肢体的形状,以减少对用户皮肤的压力(罗孔等人,2007年;庞斯,2010年)。此外,机器人的驱动和控制应允许在两种操作模式下安全地执行康复训练:机器人主导模式,即机器人驱动使用者完成训练;以及患者主导模式,即使用者驱动机器人,而机器人仅部分辅助运动(克雷布斯等人,1998年)。
神经机器人学肘部外骨骼(NEUROExos)在现有技术中提出了三种创新的设计方案(图15):(i)采用双壳连接件的紧凑轻量化机械结构,具有较大的人机交互区域,以最小化对皮肤的压力;(ii)一个4自由度被动机构,通过确保人体与机器人关节轴线的对齐,消除肘部关节上的不必要负载;(iii)为机械臂NEURARM开发的仿生远程拮抗驱动单元(伦齐等人,2011;Vitiello等人,2013年)。
6.2 系统概述
NEUROExos 是一种机电设备,由以下四个子系统组成:(i)两个双壳结构连杆,(ii)一个4自由度被动机构,(iii)远程拮抗肌腱驱动柔性执行装置,(iv)控制系统和传感装置。
计算机辅助设计模型和(b)被动机构布局。(1) NEUROExos屈伸关节,轴线ܣிா。(2)通过花键

















 665
665

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









