



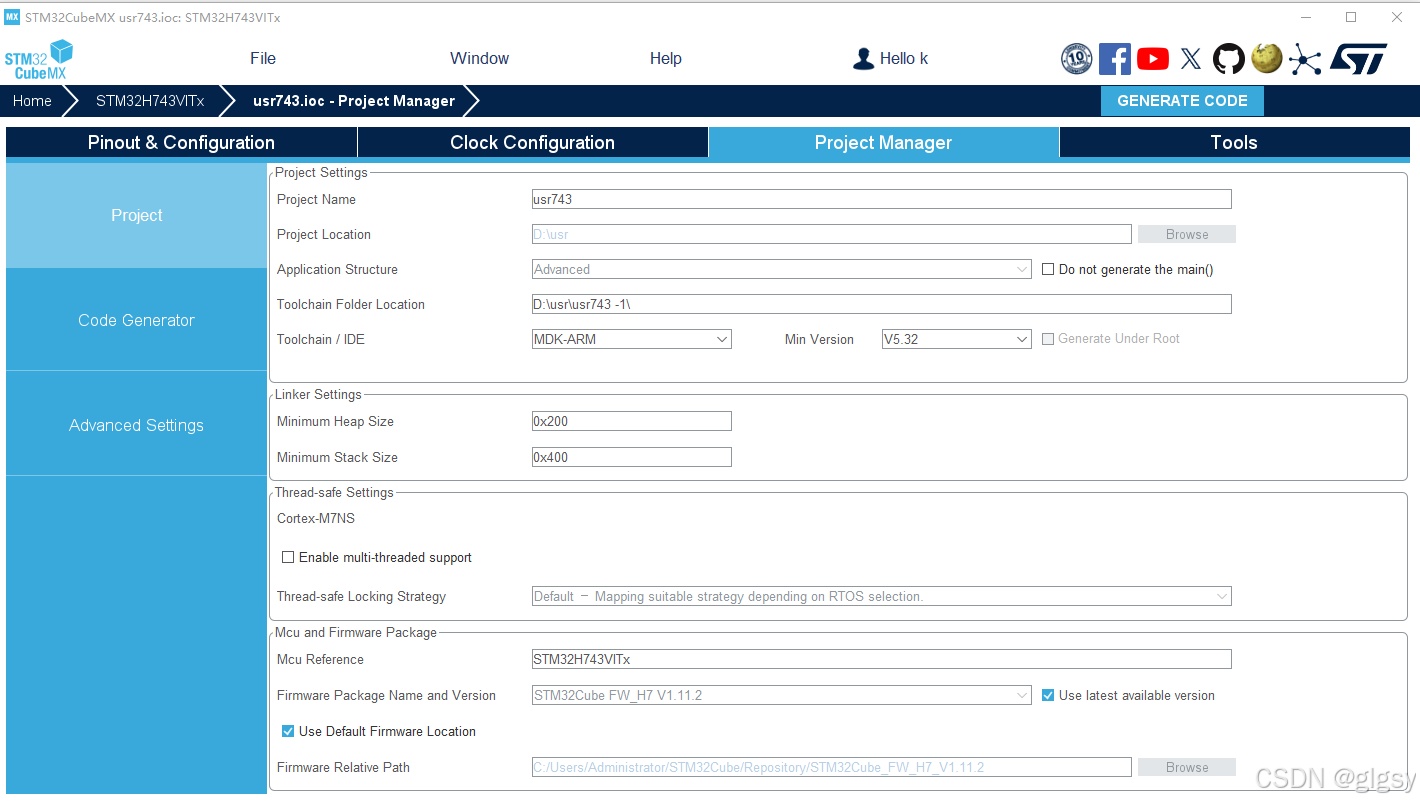
配置STM32两个串口实现透传。使用STM32CubeMX配置
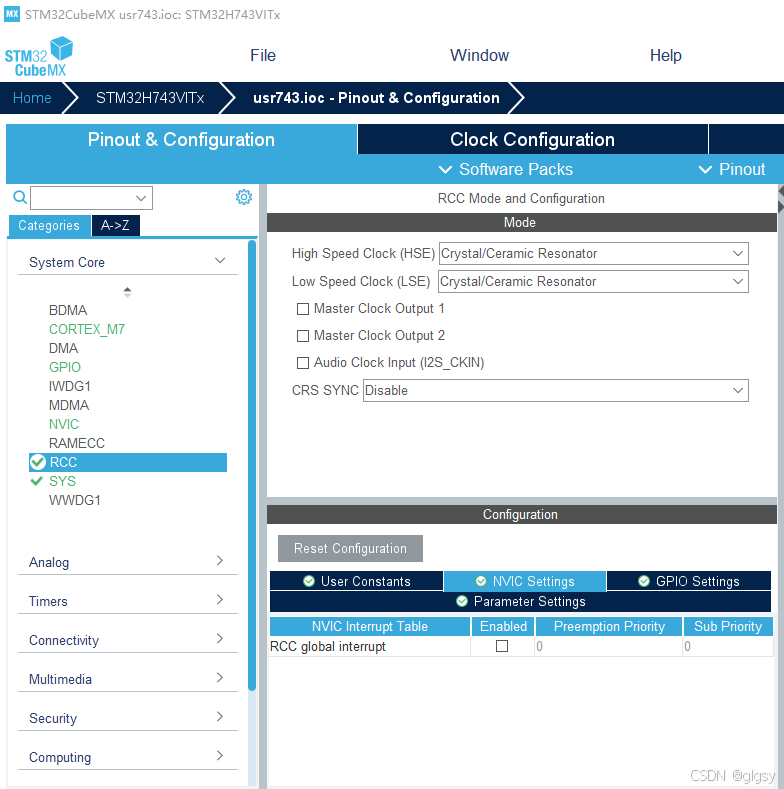
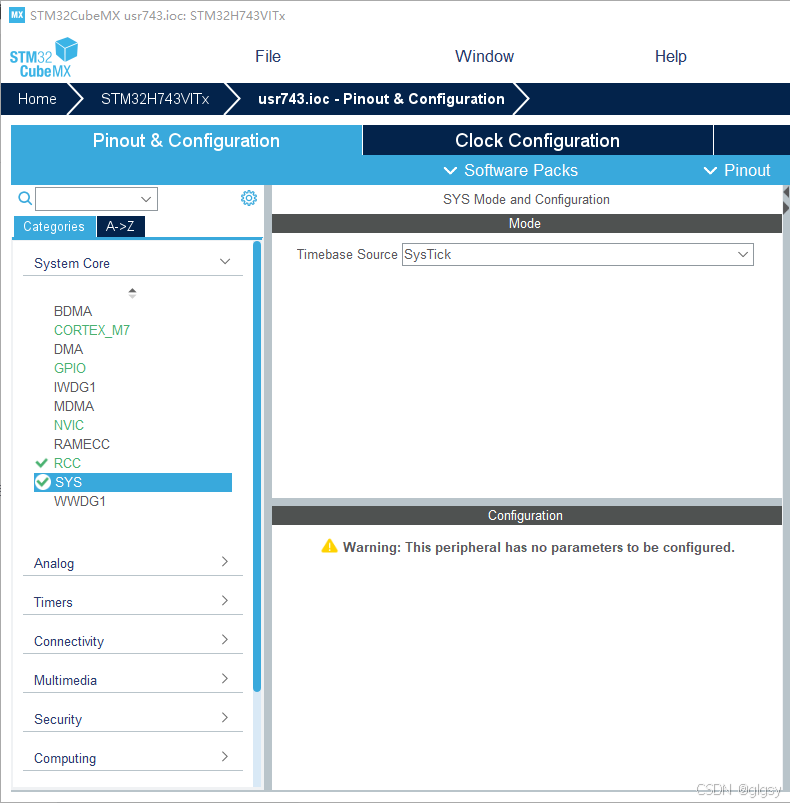
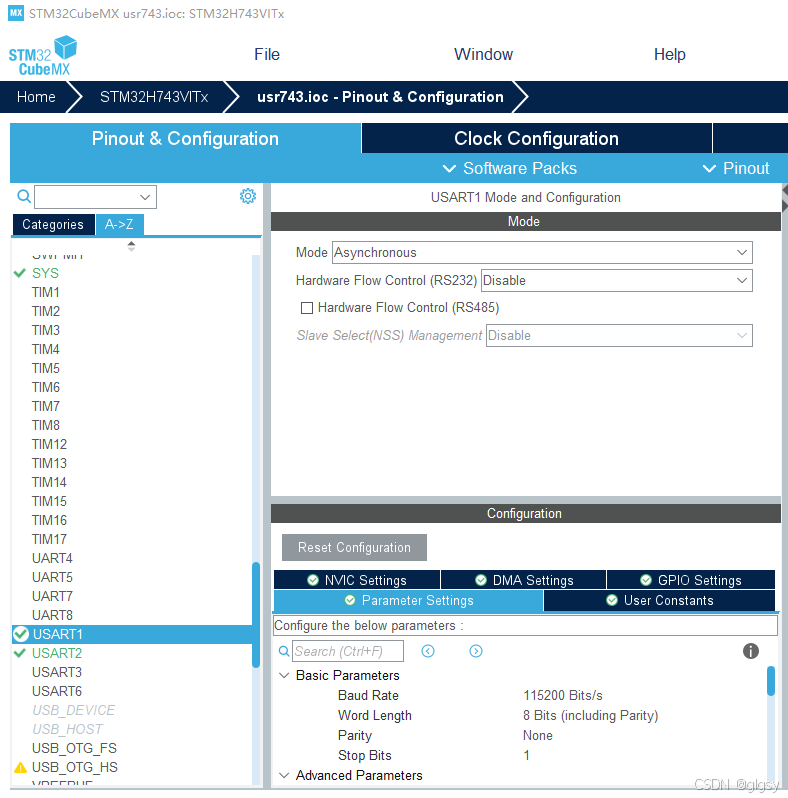
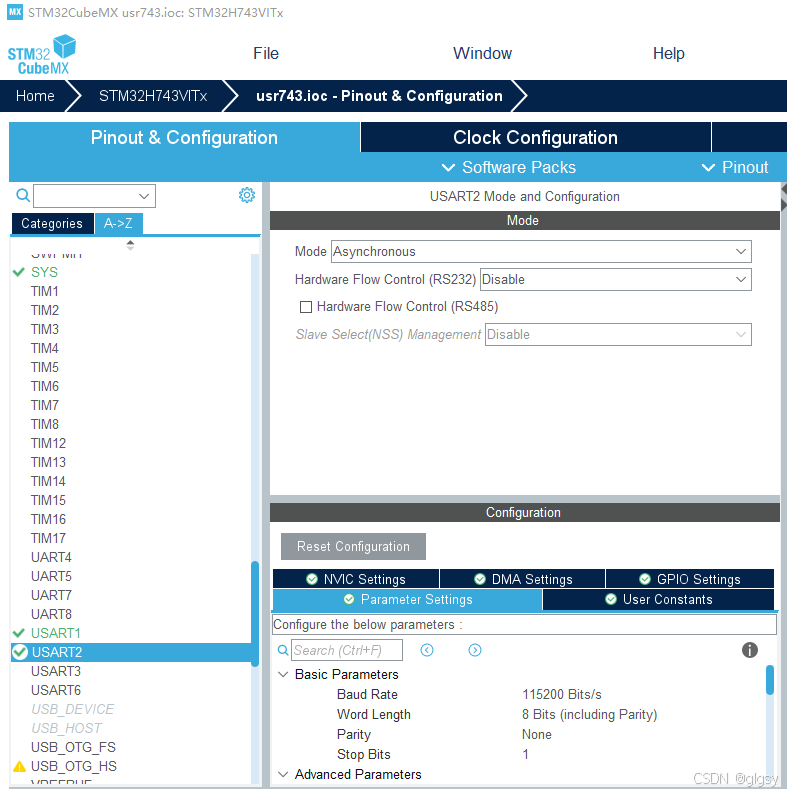
配置两个串口USART1和USART2
生成文件
改写usart.c加入代码
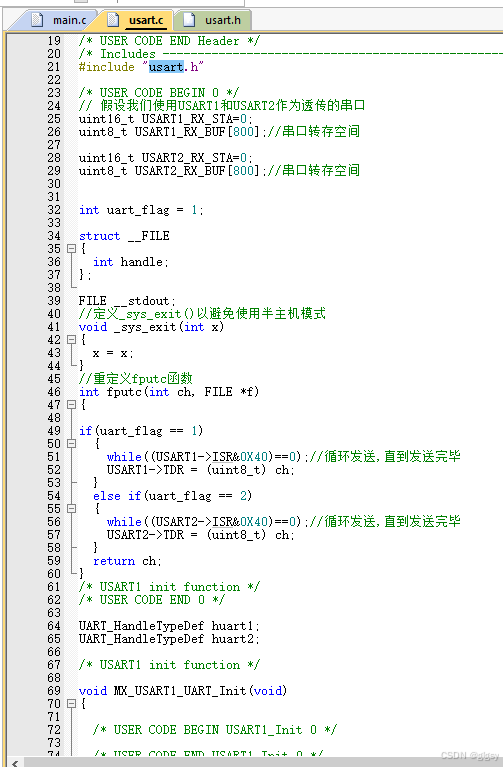
/* USER CODE BEGIN 0 */
// 假设我们使用USART1和USART2作为透传的串口
uint16_t USART1_RX_STA=0;
uint8_t USART1_RX_BUF[800];//串口转存空间
uint16_t USART2_RX_STA=0;
uint8_t USART2_RX_BUF[800];//串口转存空间
int uart_flag = 1;
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
if(uart_flag == 1)
{
while((USART1->ISR&0X40)==0);//循环发送,直到发送完毕
USART1->TDR = (uint8_t) ch;
}
else if(uart_flag == 2)
{
while((USART2->ISR&0X40)==0);//循环发送,直到发送完毕
USART2->TDR = (uint8_t) ch;
}
return ch;
}
/* USART1 init function */
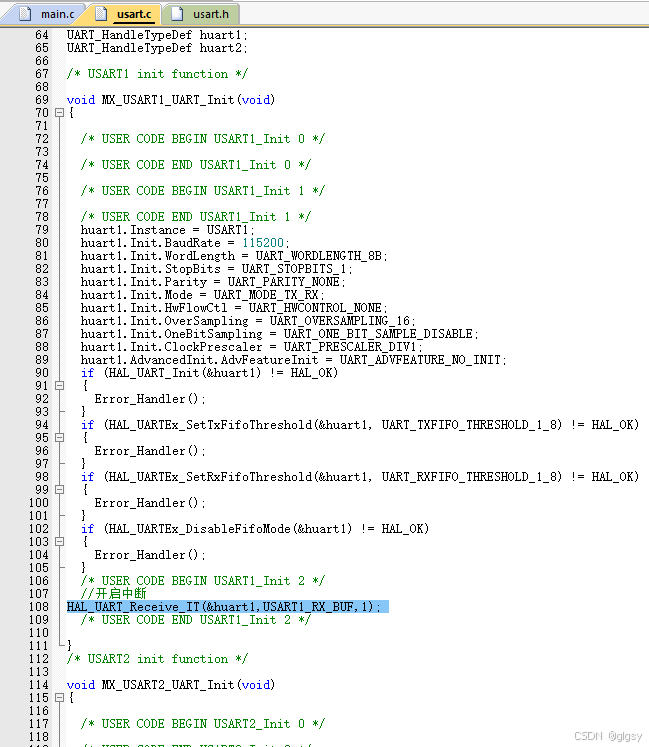
/* USER CODE END 0 */在MX_USART1_UART_Init(void)中加入语句HAL_UART_Receive_IT(&huart1,USART1_RX_BUF,1); 开启中断
在回调函数HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)中加入转发语句
/* USER CODE BEGIN 1 */
// USART1中断回调函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if (huart->Instance == USART1)
{
HAL_UART_Transmit(&huart2,USART1_RX_BUF,1,100);//串口2发送接收buff里的东西
HAL_UART_Receive_IT(&huart1,USART1_RX_BUF,1);// 再次启动USART1的接收中断
uart_flag = 1;
}
else if (huart->Instance == USART2)
{
HAL_UART_Transmit(&huart1,USART2_RX_BUF,1,100);//串口1发送接收buff里的东西
HAL_UART_Receive_IT(&huart2,USART2_RX_BUF,1);// 再次启动USART2的接收中断
uart_flag = 2;
}
}
/* USER CODE END 1 */完整usart.c代码
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file usart.c
* @brief This file provides code for the configuration
* of the USART instances.
******************************************************************************
* @attention
*
* Copyright (c) 2024 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "usart.h"
/* USER CODE BEGIN 0 */
// 假设我们使用USART1和USART2作为透传的串口
uint16_t USART1_RX_STA=0;
uint8_t USART1_RX_BUF[800];//串口转存空间
uint16_t USART2_RX_STA=0;
uint8_t USART2_RX_BUF[800];//串口转存空间
int uart_flag = 1;
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
if(uart_flag == 1)
{
while((USART1->ISR&0X40)==0);//循环发送,直到发送完毕
USART1->TDR = (uint8_t) ch;
}
else if(uart_flag == 2)
{
while((USART2->ISR&0X40)==0);//循环发送,直到发送完毕
USART2->TDR = (uint8_t) ch;
}
return ch;
}
/* USART1 init function */
/* USER CODE END 0 */
UART_HandleTypeDef huart1;
UART_HandleTypeDef huart2;
/* USART1 init function */
void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
huart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
huart1.Init.ClockPrescaler = UART_PRESCALER_DIV1;
huart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_SetTxFifoThreshold(&huart1, UART_TXFIFO_THRESHOLD_1_8) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_SetRxFifoThreshold(&huart1, UART_RXFIFO_THRESHOLD_1_8) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_DisableFifoMode(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
//开启中断
HAL_UART_Receive_IT(&huart1,USART1_RX_BUF,1);
/* USER CODE END USART1_Init 2 */
}
/* USART2 init function */
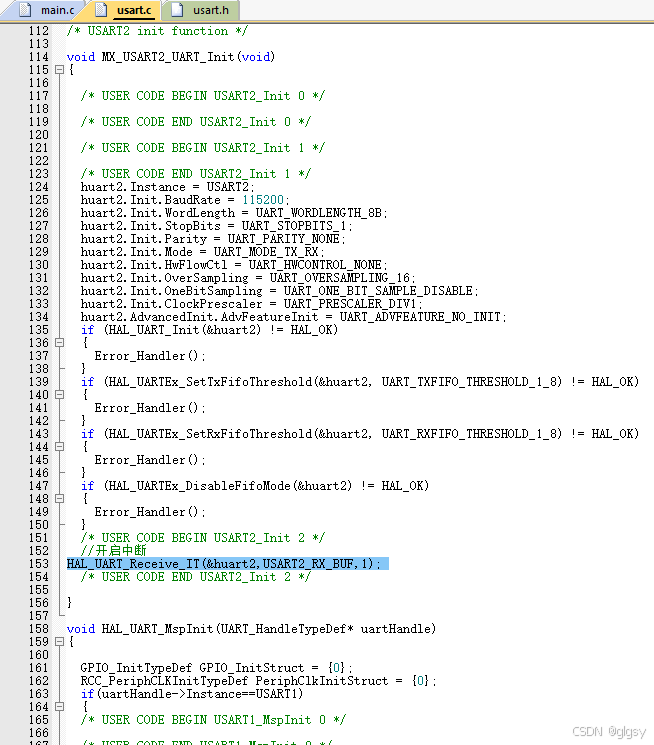
void MX_USART2_UART_Init(void)
{
/* USER CODE BEGIN USART2_Init 0 */
/* USER CODE END USART2_Init 0 */
/* USER CODE BEGIN USART2_Init 1 */
/* USER CODE END USART2_Init 1 */
huart2.Instance = USART2;
huart2.Init.BaudRate = 115200;
huart2.Init.WordLength = UART_WORDLENGTH_8B;
huart2.Init.StopBits = UART_STOPBITS_1;
huart2.Init.Parity = UART_PARITY_NONE;
huart2.Init.Mode = UART_MODE_TX_RX;
huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart2.Init.OverSampling = UART_OVERSAMPLING_16;
huart2.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
huart2.Init.ClockPrescaler = UART_PRESCALER_DIV1;
huart2.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
if (HAL_UART_Init(&huart2) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_SetTxFifoThreshold(&huart2, UART_TXFIFO_THRESHOLD_1_8) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_SetRxFifoThreshold(&huart2, UART_RXFIFO_THRESHOLD_1_8) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_DisableFifoMode(&huart2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART2_Init 2 */
//开启中断
HAL_UART_Receive_IT(&huart2,USART2_RX_BUF,1);
/* USER CODE END USART2_Init 2 */
}
void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
RCC_PeriphCLKInitTypeDef PeriphClkInitStruct = {0};
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspInit 0 */
/* USER CODE END USART1_MspInit 0 */
/** Initializes the peripherals clock
*/
PeriphClkInitStruct.PeriphClockSelection = RCC_PERIPHCLK_USART1;
PeriphClkInitStruct.Usart16ClockSelection = RCC_USART16CLKSOURCE_D2PCLK2;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInitStruct) != HAL_OK)
{
Error_Handler();
}
/* USART1 clock enable */
__HAL_RCC_USART1_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/**USART1 GPIO Configuration
PB14 ------> USART1_TX
PB15 ------> USART1_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_14|GPIO_PIN_15;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF4_USART1;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* USART1 interrupt Init */
HAL_NVIC_SetPriority(USART1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspInit 1 */
/* USER CODE END USART1_MspInit 1 */
}
else if(uartHandle->Instance==USART2)
{
/* USER CODE BEGIN USART2_MspInit 0 */
/* USER CODE END USART2_MspInit 0 */
/** Initializes the peripherals clock
*/
PeriphClkInitStruct.PeriphClockSelection = RCC_PERIPHCLK_USART2;
PeriphClkInitStruct.Usart234578ClockSelection = RCC_USART234578CLKSOURCE_D2PCLK1;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInitStruct) != HAL_OK)
{
Error_Handler();
}
/* USART2 clock enable */
__HAL_RCC_USART2_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**USART2 GPIO Configuration
PA2 ------> USART2_TX
PA3 ------> USART2_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_2|GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF7_USART2;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USART2 interrupt Init */
HAL_NVIC_SetPriority(USART2_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USART2_IRQn);
/* USER CODE BEGIN USART2_MspInit 1 */
/* USER CODE END USART2_MspInit 1 */
}
}
void HAL_UART_MspDeInit(UART_HandleTypeDef* uartHandle)
{
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspDeInit 0 */
/* USER CODE END USART1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_USART1_CLK_DISABLE();
/**USART1 GPIO Configuration
PB14 ------> USART1_TX
PB15 ------> USART1_RX
*/
HAL_GPIO_DeInit(GPIOB, GPIO_PIN_14|GPIO_PIN_15);
/* USART1 interrupt Deinit */
HAL_NVIC_DisableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspDeInit 1 */
/* USER CODE END USART1_MspDeInit 1 */
}
else if(uartHandle->Instance==USART2)
{
/* USER CODE BEGIN USART2_MspDeInit 0 */
/* USER CODE END USART2_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_USART2_CLK_DISABLE();
/**USART2 GPIO Configuration
PA2 ------> USART2_TX
PA3 ------> USART2_RX
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_2|GPIO_PIN_3);
/* USART2 interrupt Deinit */
HAL_NVIC_DisableIRQ(USART2_IRQn);
/* USER CODE BEGIN USART2_MspDeInit 1 */
/* USER CODE END USART2_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
// USART1中断回调函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if (huart->Instance == USART1)
{
HAL_UART_Transmit(&huart2,USART1_RX_BUF,1,100);//串口2发送接收buff里的东西
HAL_UART_Receive_IT(&huart1,USART1_RX_BUF,1);// 再次启动USART1的接收中断
uart_flag = 1;
}
else if (huart->Instance == USART2)
{
HAL_UART_Transmit(&huart1,USART2_RX_BUF,1,100);//串口1发送接收buff里的东西
HAL_UART_Receive_IT(&huart2,USART2_RX_BUF,1);// 再次启动USART2的接收中断
uart_flag = 2;
}
}
/* USER CODE END 1 */
程序下载:https://download.youkuaiyun.com/download/glgsy/90089167?spm=1001.2014.3001.5503


















 1971
1971

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









