 STM32 CUBEMX实现多串口printf功能
STM32 CUBEMX实现多串口printf功能




一般来说,在HAL库中,我们会重写fputc或者_write函数,使得printf的输出通过某个特定的串口发送。比如,如果只针对USART1,可以这样做:
#include <stdio.h>
int __io_putchar(int ch) {
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, HAL_MAX_DELAY);
return ch;
}
然后,在工程设置里勾选使用MicroLIB或者在链接器选项中做相应配置。
如果想要多串口使用,需要创建一个通用的可变参数函数,用于向指定串口发送格式化数据:
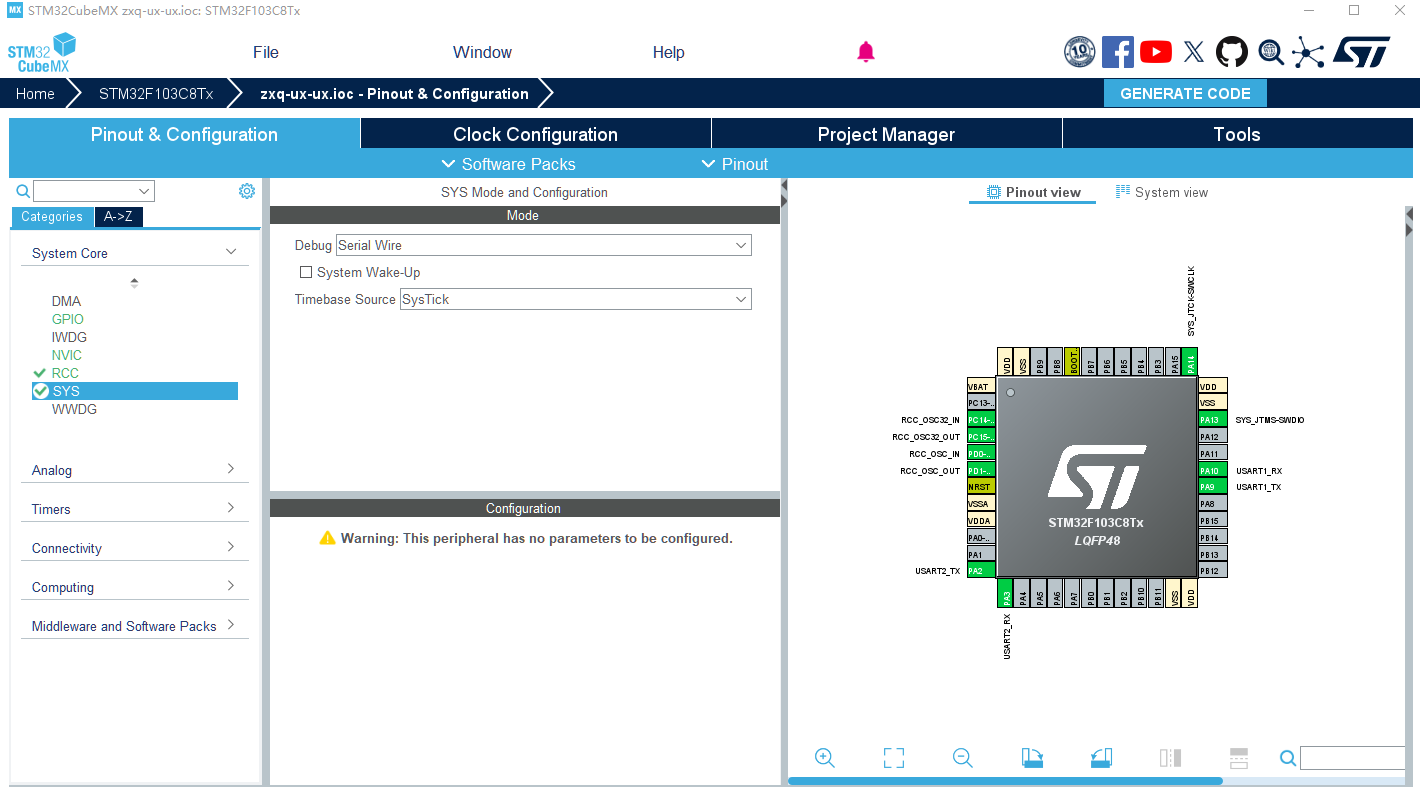
- 使用STM32CubeMX初始化所需的串口(如USART1、USART2、USART3)。
按照需求设置好串口的波特率、数据位、停止位、奇偶校验
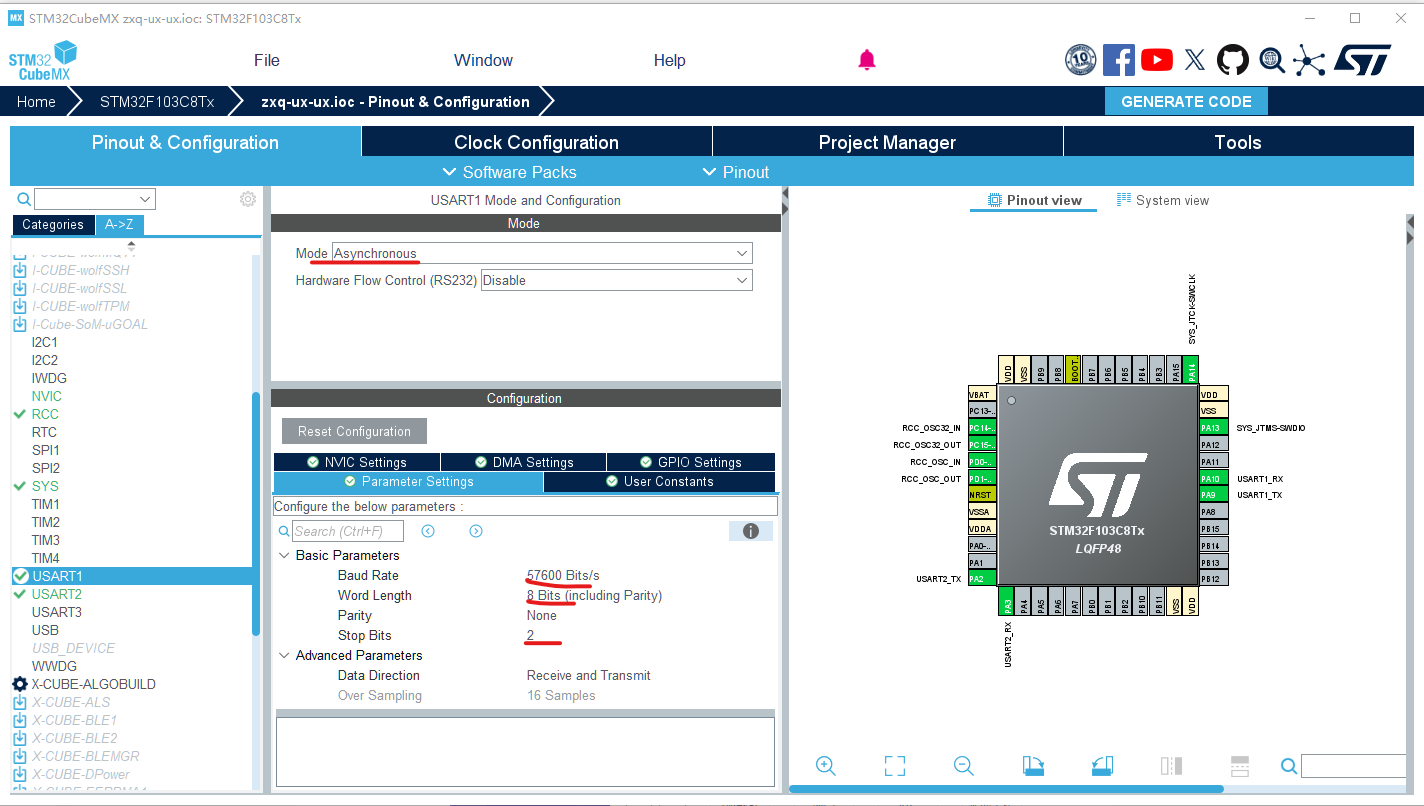
此处我按照我这边需求设置USART1为57600波特率、数据位8、停止位2、无奇偶校验
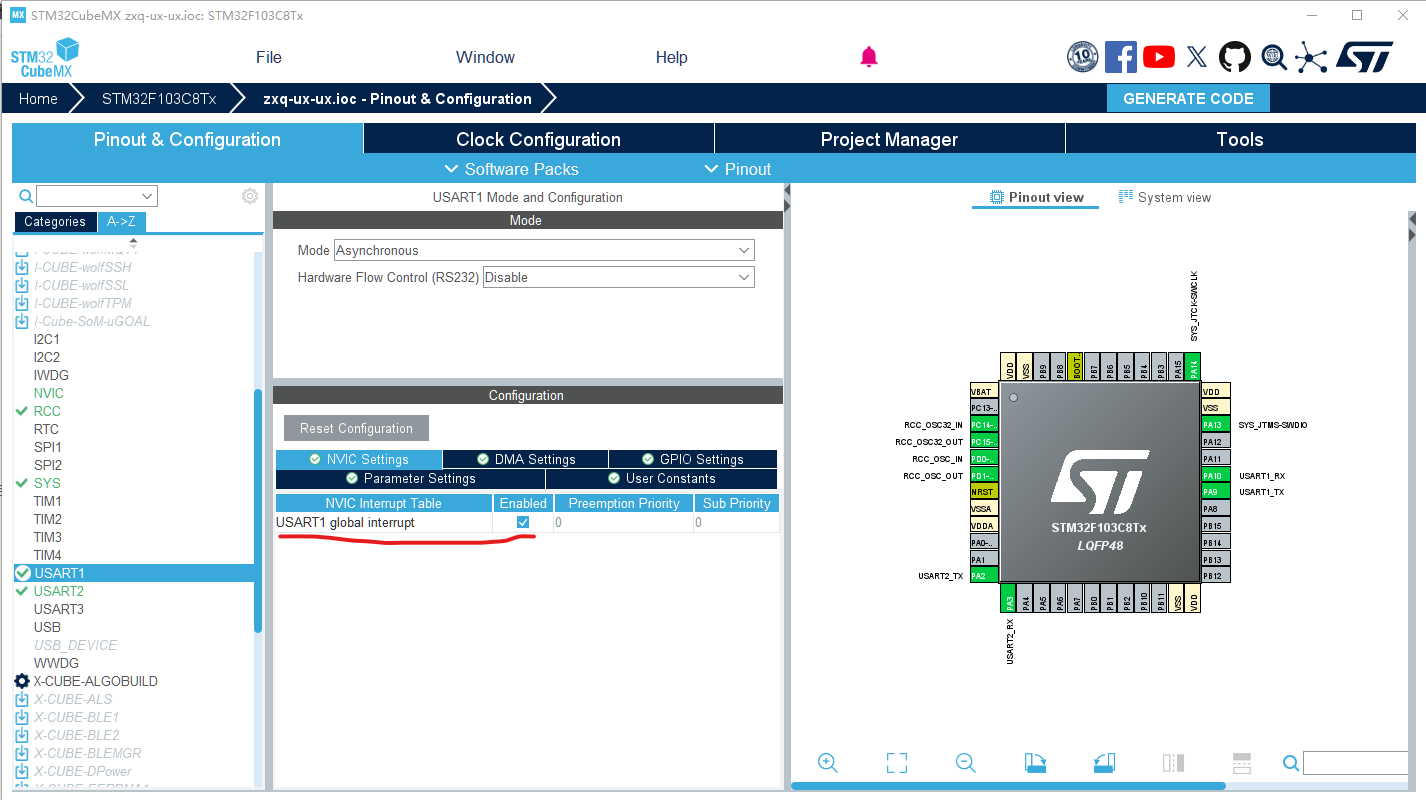
由于我需要在串口1收到数据后,发送到串口2,所有需要串口1打开中断。
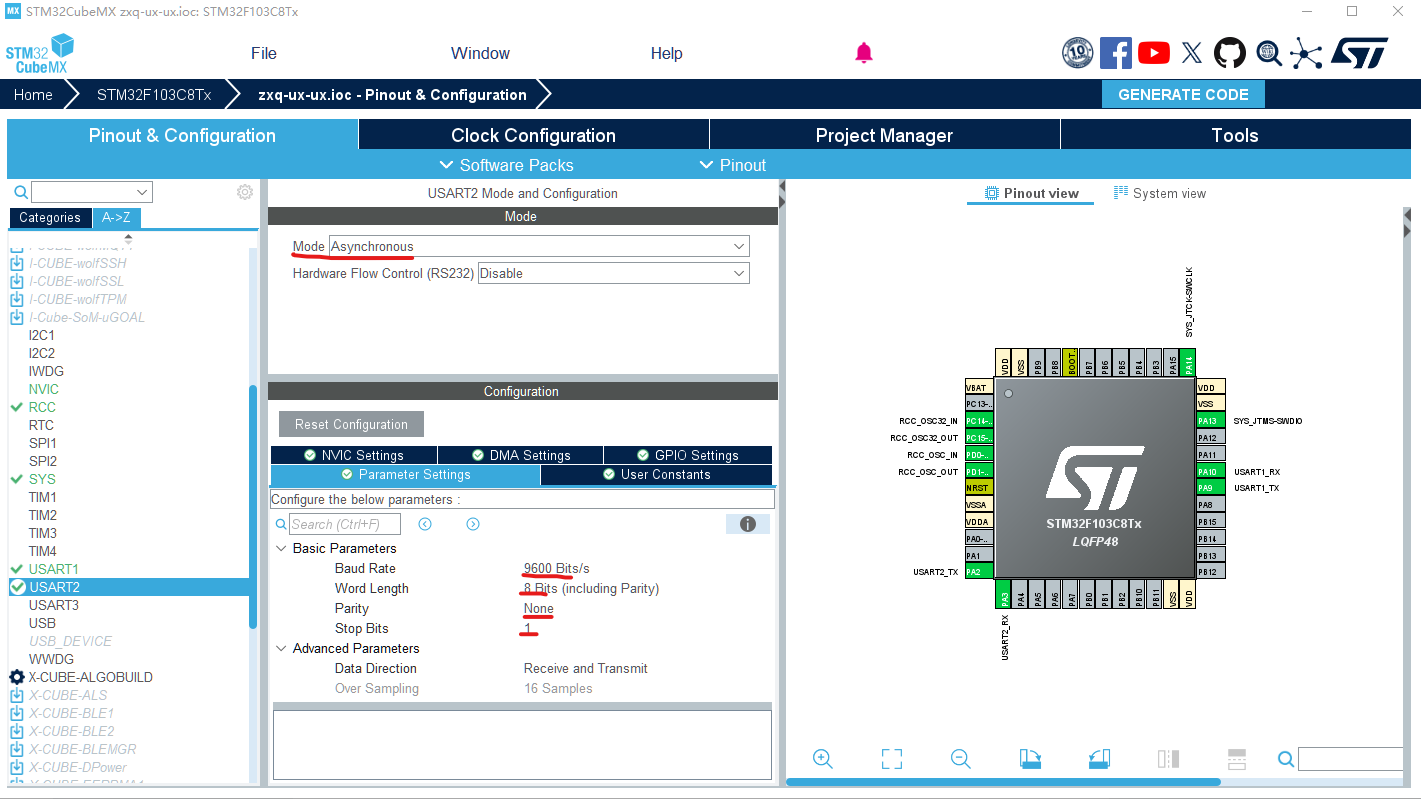
USART2设置为9600波特率、数据位8、停止位1、无奇偶校验。USART3没配置。
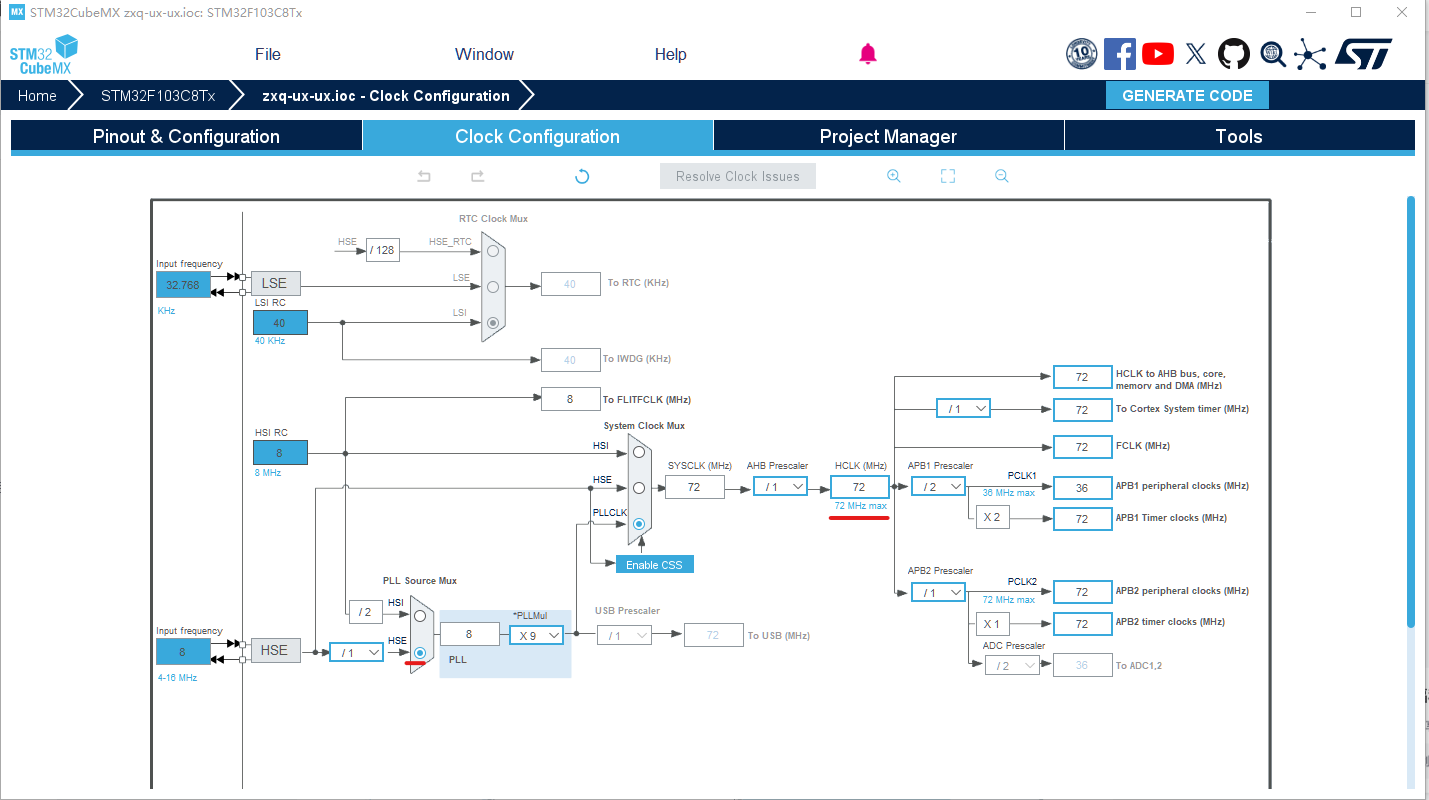
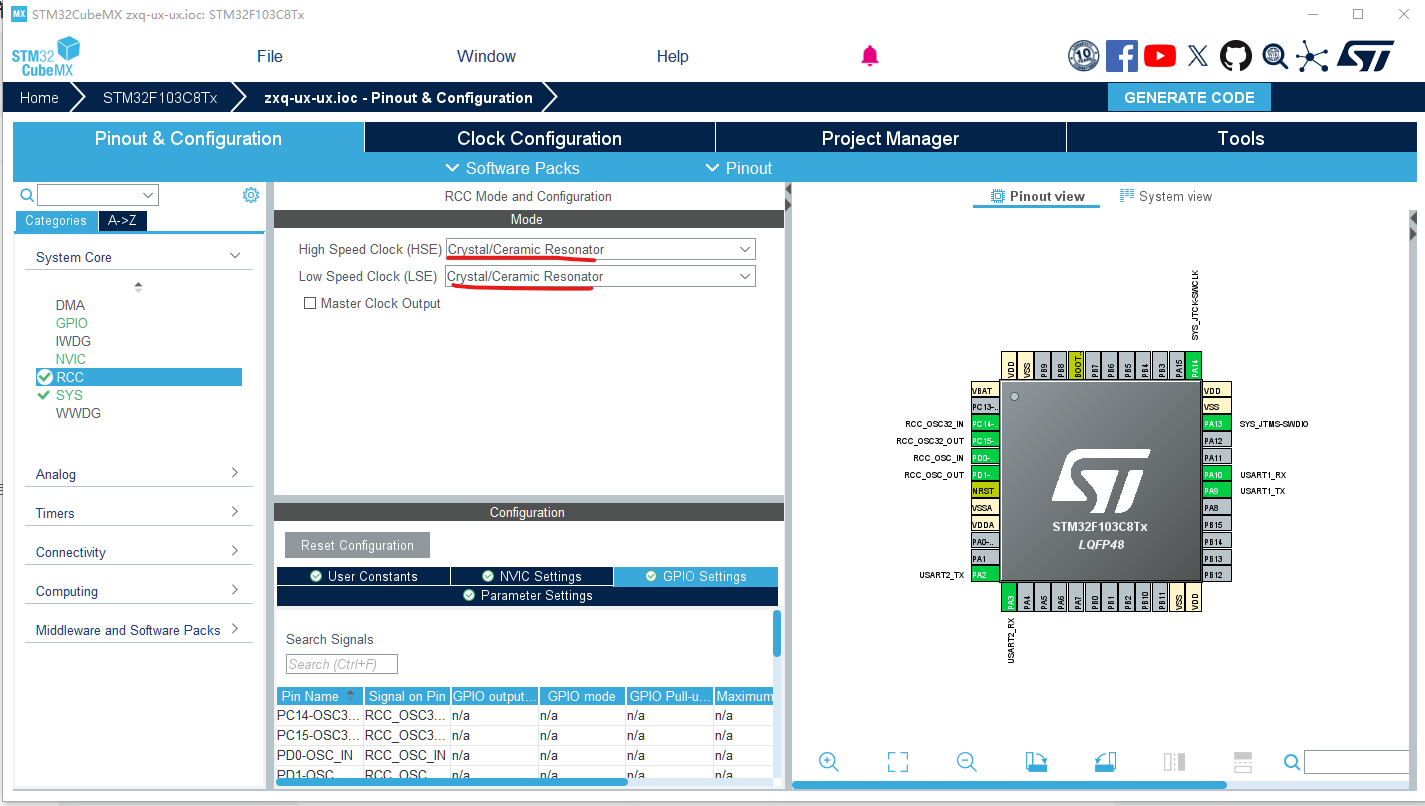
设置完串口后设置时钟为72MHZ
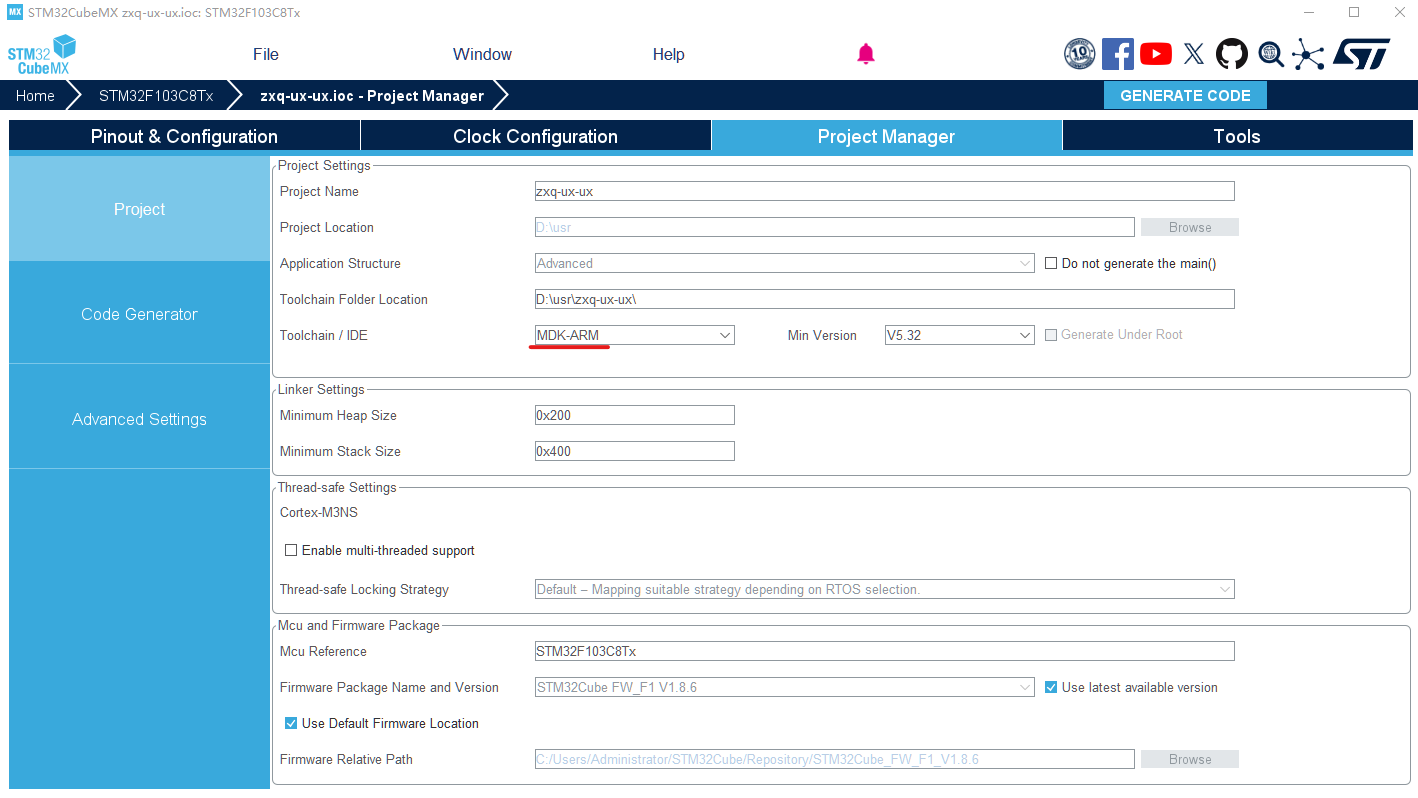
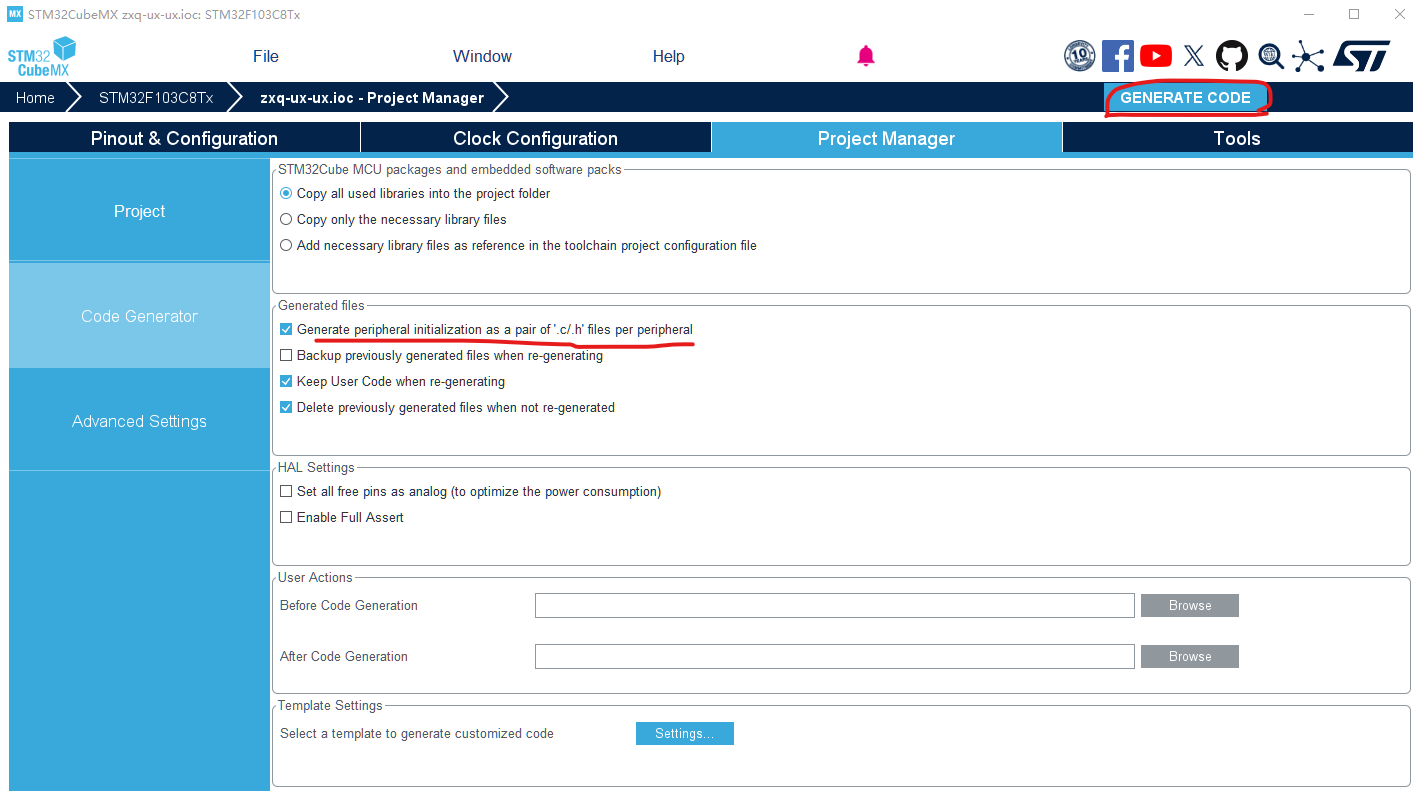
最后生成程序
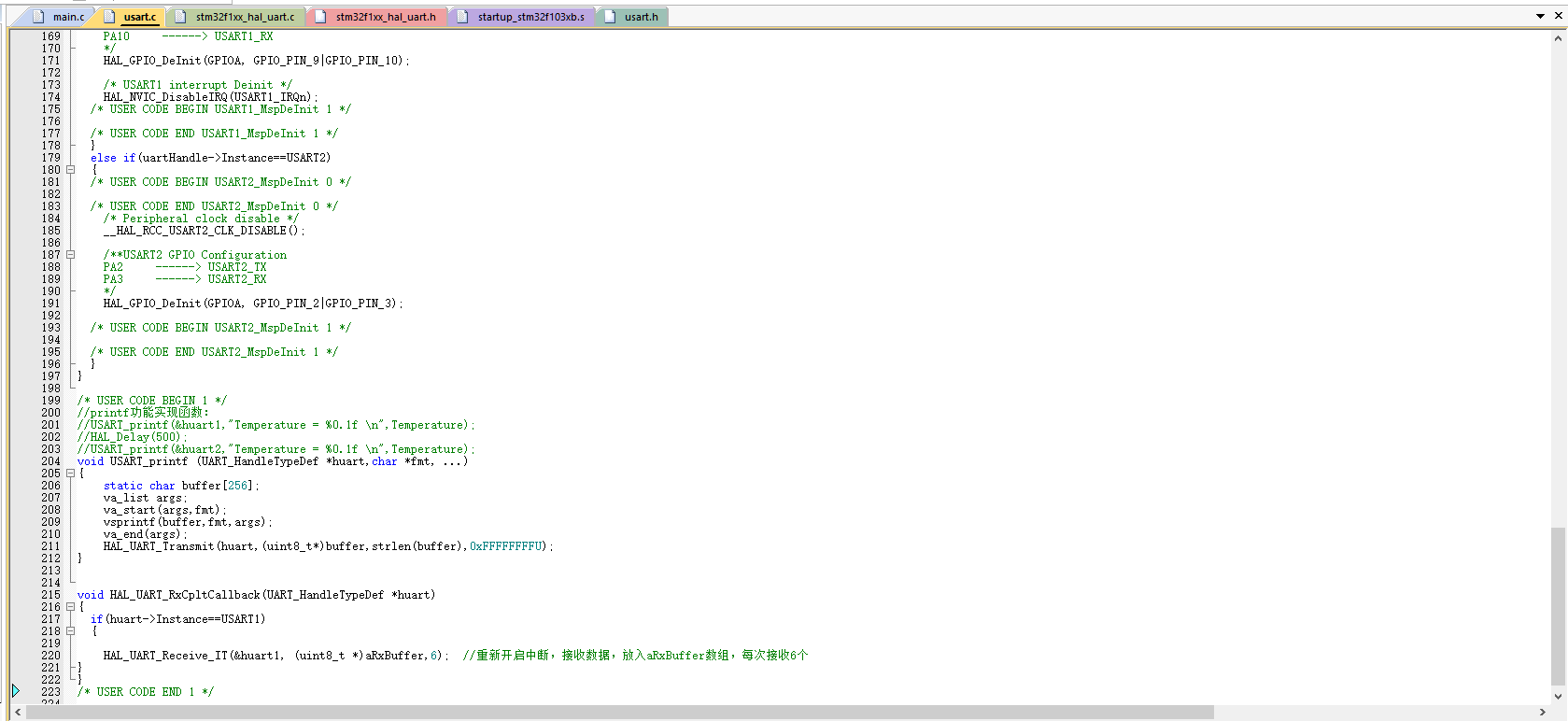
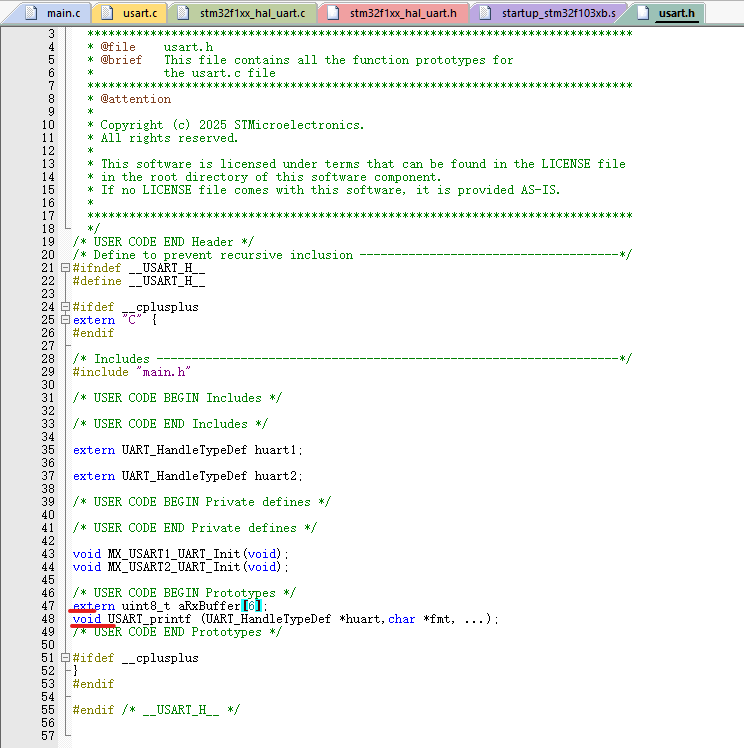
在usart.c中加入函数USART_printf
void USART_printf (UART_HandleTypeDef *huart,char *fmt, ...)
{
static char buffer[256];
va_list args;
va_start(args,fmt);
vsprintf(buffer,fmt,args);
va_end(args);
HAL_UART_Transmit(huart,(uint8_t*)buffer,strlen(buffer),0xFFFFFFFFU);
}
可以printf功能实现,USART_printf(&huart2,"Temperature = %0.1f \n",Temperature);
为了实现串口1收到数据后发送到串口2:
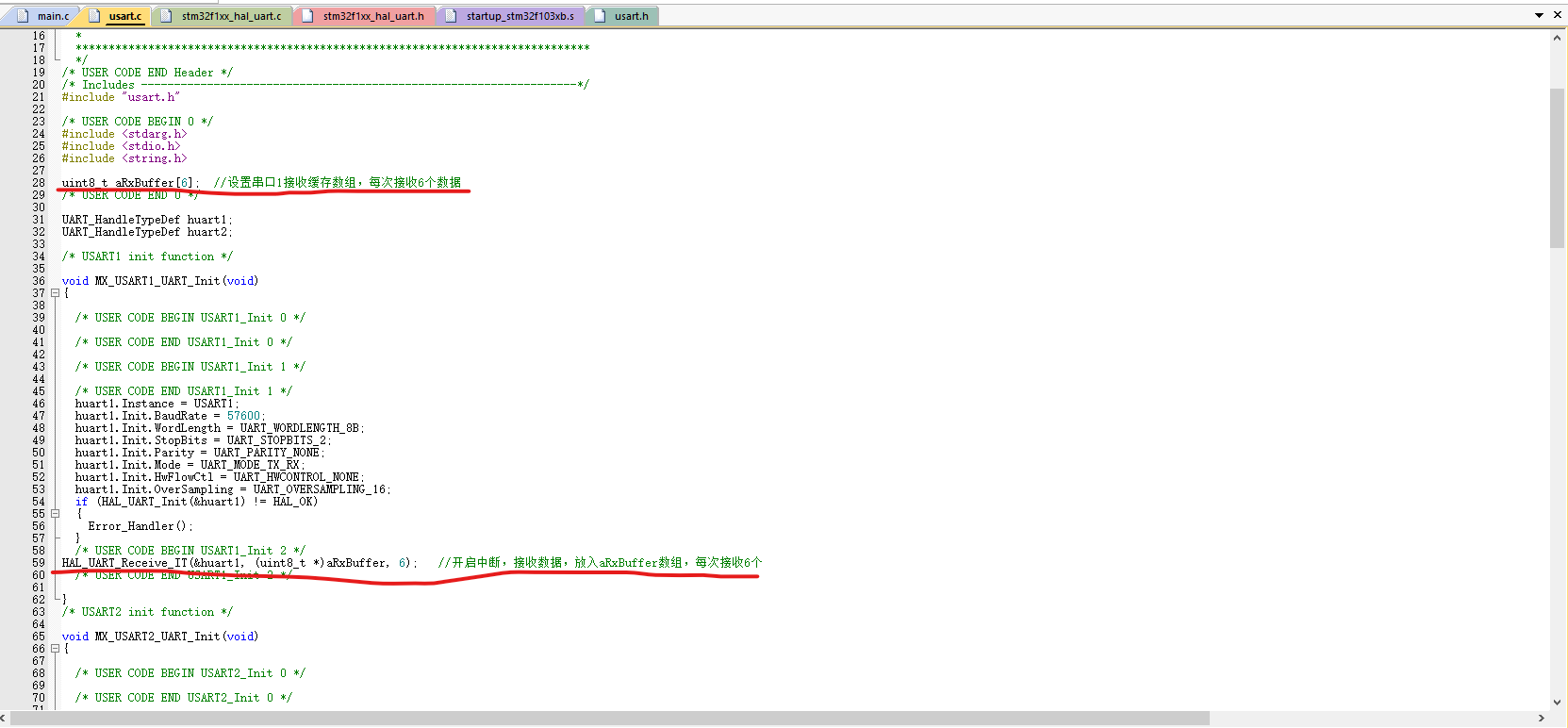
在MX_USART1_UART_Init(void)中开启中断接收,
HAL_UART_Receive_IT(&huart1, (uint8_t *)aRxBuffer, 6); //开启中断,接收数据,放入aRxBuffer数组,每次接收6个
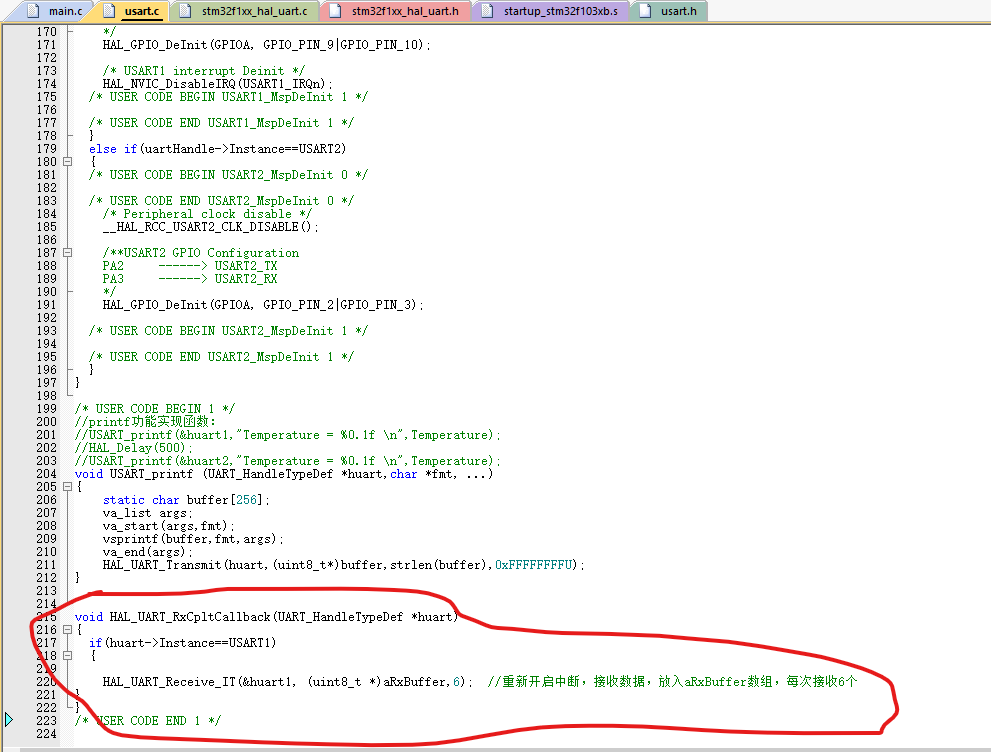
重定向HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart),串口1接收完后再次启用中断接收HAL_UART_Receive_IT(&huart1, (uint8_t *)aRxBuffer,6); //重新开启中断,接收数据,放入aRxBuffer数组,每次接收6个。
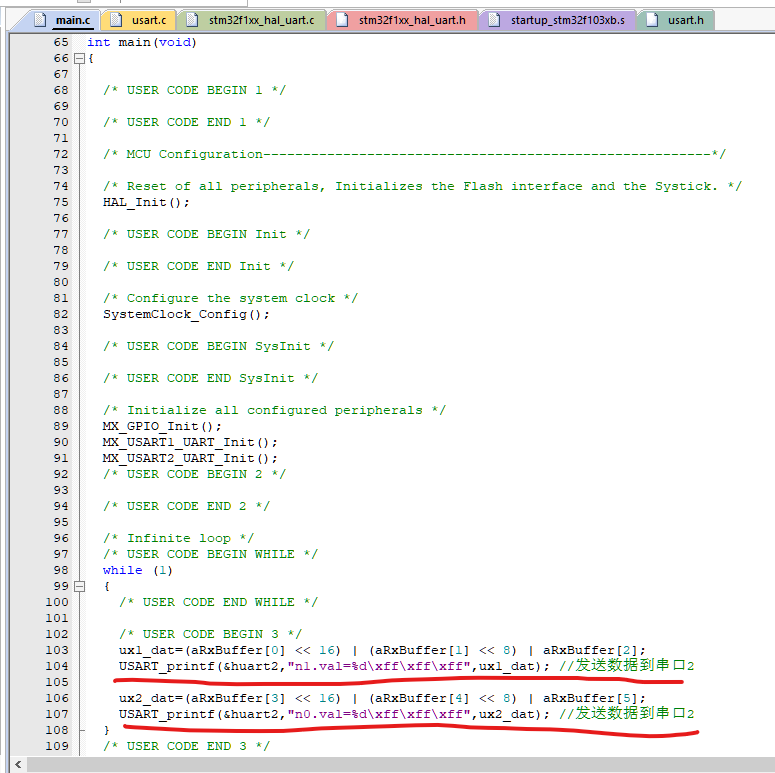
在main中循环发送串口1收到的数据,我这里分为2段从串口2发送出去。完整程序usart.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file usart.c
* @brief This file provides code for the configuration
* of the USART instances.
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "usart.h"
/* USER CODE BEGIN 0 */
#include <stdarg.h>
#include <stdio.h>
#include <string.h>
uint8_t aRxBuffer[6]; //设置串口1接收缓存数组,每次接收6个数据
/* USER CODE END 0 */
UART_HandleTypeDef huart1;
UART_HandleTypeDef huart2;
/* USART1 init function */
void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 57600;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_2;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
HAL_UART_Receive_IT(&huart1, (uint8_t *)aRxBuffer, 6); //开启中断,接收数据,放入aRxBuffer数组,每次接收6个
/* USER CODE END USART1_Init 2 */
}
/* USART2 init function */
void MX_USART2_UART_Init(void)
{
/* USER CODE BEGIN USART2_Init 0 */
/* USER CODE END USART2_Init 0 */
/* USER CODE BEGIN USART2_Init 1 */
/* USER CODE END USART2_Init 1 */
huart2.Instance = USART2;
huart2.Init.BaudRate = 9600;
huart2.Init.WordLength = UART_WORDLENGTH_8B;
huart2.Init.StopBits = UART_STOPBITS_1;
huart2.Init.Parity = UART_PARITY_NONE;
huart2.Init.Mode = UART_MODE_TX_RX;
huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart2.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART2_Init 2 */
/* USER CODE END USART2_Init 2 */
}
void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspInit 0 */
/* USER CODE END USART1_MspInit 0 */
/* USART1 clock enable */
__HAL_RCC_USART1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_10;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USART1 interrupt Init */
HAL_NVIC_SetPriority(USART1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspInit 1 */
/* USER CODE END USART1_MspInit 1 */
}
else if(uartHandle->Instance==USART2)
{
/* USER CODE BEGIN USART2_MspInit 0 */
/* USER CODE END USART2_MspInit 0 */
/* USART2 clock enable */
__HAL_RCC_USART2_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**USART2 GPIO Configuration
PA2 ------> USART2_TX
PA3 ------> USART2_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_2;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USER CODE BEGIN USART2_MspInit 1 */
/* USER CODE END USART2_MspInit 1 */
}
}
void HAL_UART_MspDeInit(UART_HandleTypeDef* uartHandle)
{
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspDeInit 0 */
/* USER CODE END USART1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_USART1_CLK_DISABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_9|GPIO_PIN_10);
/* USART1 interrupt Deinit */
HAL_NVIC_DisableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspDeInit 1 */
/* USER CODE END USART1_MspDeInit 1 */
}
else if(uartHandle->Instance==USART2)
{
/* USER CODE BEGIN USART2_MspDeInit 0 */
/* USER CODE END USART2_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_USART2_CLK_DISABLE();
/**USART2 GPIO Configuration
PA2 ------> USART2_TX
PA3 ------> USART2_RX
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_2|GPIO_PIN_3);
/* USER CODE BEGIN USART2_MspDeInit 1 */
/* USER CODE END USART2_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
//printf功能实现函数:
//USART_printf(&huart1,"Temperature = %0.1f \n",Temperature);
//HAL_Delay(500);
//USART_printf(&huart2,"Temperature = %0.1f \n",Temperature);
void USART_printf (UART_HandleTypeDef *huart,char *fmt, ...)
{
static char buffer[256];
va_list args;
va_start(args,fmt);
vsprintf(buffer,fmt,args);
va_end(args);
HAL_UART_Transmit(huart,(uint8_t*)buffer,strlen(buffer),0xFFFFFFFFU);
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance==USART1)
{
HAL_UART_Receive_IT(&huart1, (uint8_t *)aRxBuffer,6); //重新开启中断,接收数据,放入aRxBuffer数组,每次接收6个
}
}
/* USER CODE END 1 */
main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
uint32_t ux1_dat,ux2_dat;
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
ux1_dat=(aRxBuffer[0] << 16) | (aRxBuffer[1] << 8) | aRxBuffer[2];
USART_printf(&huart2,"n1.val=%d\xff\xff\xff",ux1_dat); //发送数据到串口2
ux2_dat=(aRxBuffer[3] << 16) | (aRxBuffer[4] << 8) | aRxBuffer[5];
USART_printf(&huart2,"n0.val=%d\xff\xff\xff",ux2_dat); //发送数据到串口2
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */


















 2055
2055

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









