







 本文深入探讨点云技术在三维重建和边缘检测中的应用,通过介绍渲染管线的四个阶段,包括应用程序、几何处理、光栅化和像素处理,阐述了从三维到二维图像的转换过程。此外,详细讲解了矩阵变换,如齐次坐标、线性变换和四元数等,并提出了一种利用像素与三角形映射关系提取轮廓的方法。实验结果显示,这种方法能有效提取出三维表面区域,且在用户软件中实现了便捷的操作流程。
本文深入探讨点云技术在三维重建和边缘检测中的应用,通过介绍渲染管线的四个阶段,包括应用程序、几何处理、光栅化和像素处理,阐述了从三维到二维图像的转换过程。此外,详细讲解了矩阵变换,如齐次坐标、线性变换和四元数等,并提出了一种利用像素与三角形映射关系提取轮廓的方法。实验结果显示,这种方法能有效提取出三维表面区域,且在用户软件中实现了便捷的操作流程。
目录
本文篇幅较长,分为上下两篇,上篇详见基于点云的三维重建与 边缘检测
4 D图形渲染
4.1 传统方法
文物研究中,获取文物建筑、雕塑等文物轮廓对研究文物形貌以及受损情况 具有重要意义。如图4-1和4-2所示,传统获取轮廓的做法是通过手工拉基线, 张网格直接测量。由于人眼误差,以及绘制时对文物可能造成损伤,所以部分工 作人员利用图形处理软件对二维数字图像进行人工标注,但该方法会造成文物三 维信息的丢失。针对该问题,本文采用图4-3所示的方法,利用重建的结果,将 其渲染为二维图像,渲染过程中保留了三维与二维之间的关系,并在下一章中对 二维图像进行边缘检测,并利用像素与三角形的映射关系最终提取轮廓内的三维 表面区域。相较于传统方法,本文方法可以更加精确的提取轮廓且可以保留三维 信息。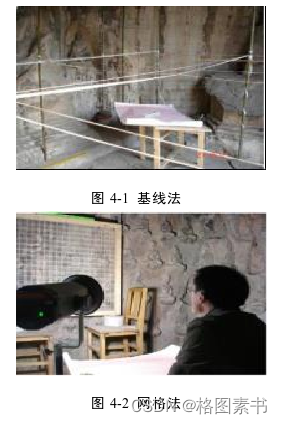

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1350
1350

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











