






 超级会员免费看
超级会员免费看
 本文介绍了如何在ROS2环境下配置Gazebo的Harmonic版本,强调了设置环境变量GZ_SIM_RESOURCE_PATH的重要性,确保sdf文件存放在正确路径。同时,提醒在使用gazebo模拟时,应直接将文件保存到目标文件夹,避免先保存再移动导致的失败问题。
本文介绍了如何在ROS2环境下配置Gazebo的Harmonic版本,强调了设置环境变量GZ_SIM_RESOURCE_PATH的重要性,确保sdf文件存放在正确路径。同时,提醒在使用gazebo模拟时,应直接将文件保存到目标文件夹,避免先保存再移动导致的失败问题。
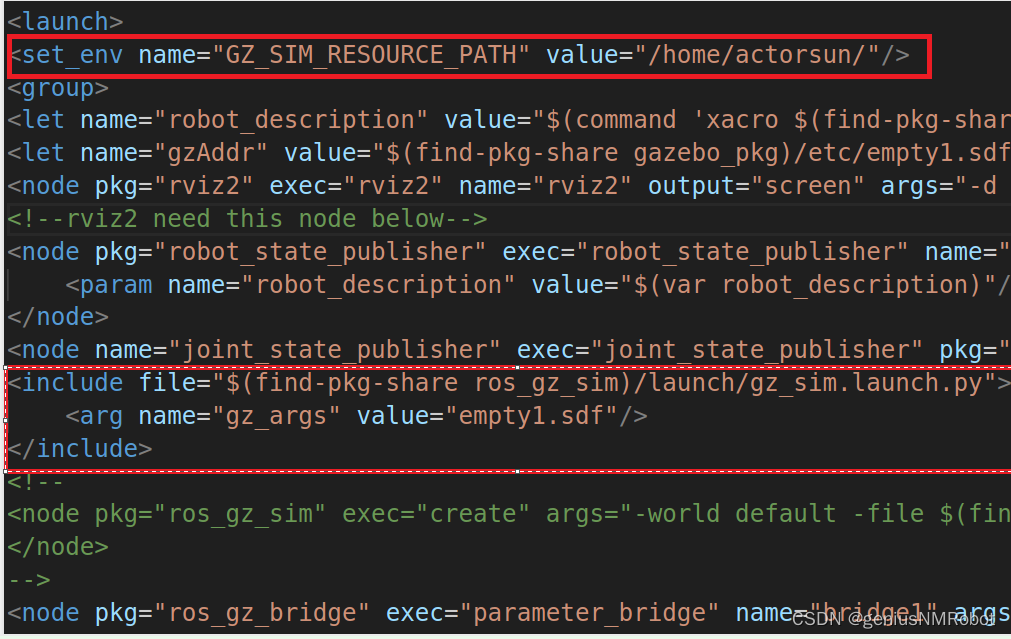
首先要设置环境变量GZ_SIM_RESOURCE_PATH 为sdf文件存放路径,
然后在include文件中使用上图方式就可以了
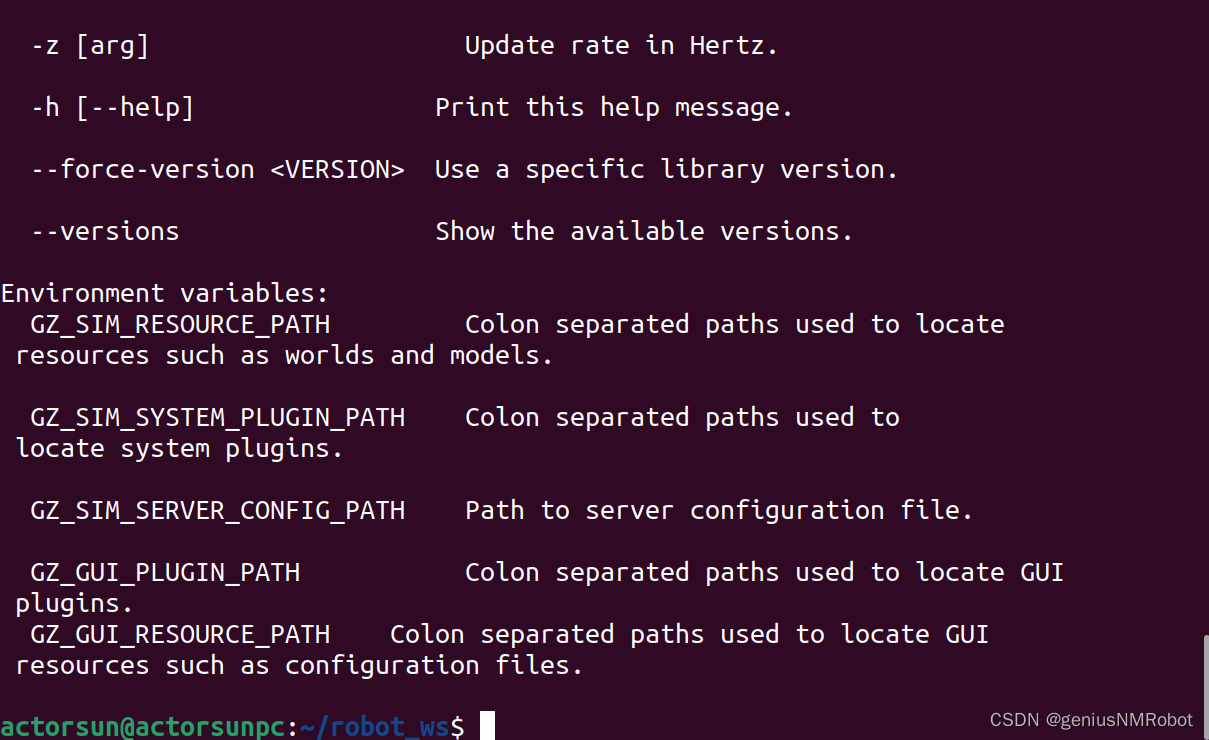
输入gz sim -h获取帮助

首先要设置环境变量GZ_SIM_RESOURCE_PATH 为sdf文件存放路径,
然后在include文件中使用上图方式就可以了
输入gz sim -h获取帮助
 1987
6240
1987
6240

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























