




 博客讨论了Cartographer中XYRANGFINDER的实现,它是基于输入迭代器的。文章提到了C++17中可能淘汰的iterator_category,并引用了关于迭代器的cppreference资源。此外,还介绍了用于栅格地图建索引的Eigen::Array2i,包括min_xy_index_, max_xy_index_和xy_index_,以及cell的边界和索引管理。"
112633693,10294011,CCD与CMOS图像传感器:一场技术较量,"['图像传感器', 'CCD技术', 'CMOS技术', '工业自动化', '智能硬件']
博客讨论了Cartographer中XYRANGFINDER的实现,它是基于输入迭代器的。文章提到了C++17中可能淘汰的iterator_category,并引用了关于迭代器的cppreference资源。此外,还介绍了用于栅格地图建索引的Eigen::Array2i,包括min_xy_index_, max_xy_index_和xy_index_,以及cell的边界和索引管理。"
112633693,10294011,CCD与CMOS图像传感器:一场技术较量,"['图像传感器', 'CCD技术', 'CMOS技术', '工业自动化', '智能硬件']
/*
* Copyright 2016 The Cartographer Authors
*
* Licensed under the Apache License, Version 2.0 (the "License");
* you may not use this file except in compliance with the License.
* You may obtain a copy of the License at
*
* http://www.apache.org/licenses/LICENSE-2.0
*
* Unless required by applicable law or agreed to in writing, software
* distributed under the License is distributed on an "AS IS" BASIS,
* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
* See the License for the specific language governing permissions and
* limitations under the License.
*/
#ifndef CARTOGRAPHER_MAPPING_2D_XY_INDEX_H_
#define CARTOGRAPHER_MAPPING_2D_XY_INDEX_H_
#include <algorithm>
#include <cmath>
#include <iostream>
#include <iterator>
#include "Eigen/Core"
#include "cartographer/common/math.h"
#include "cartographer/common/port.h"
#include "cartographer/mapping_2d/proto/cell_limits.pb.h"
#include "glog/logging.h"
namespace cartographer {
namespace mapping_2d {
struct CellLimits {
CellLimits() = default;
CellLimits(int init_num_x_cells, int init_num_y_cells)
: num_x_cells(init_num_x_cells), num_y_cells(init_num_y_cells) {}
explicit CellLimits(const proto::CellLimits& cell_limits)
: num_x_cells(cell_limits.num_x_cells()),
num_y_cells(cell_limits.num_y_cells()) {}
int num_x_cells = 0;
int num_y_cells = 0;
};//
inline proto::CellLimits ToProto(const CellLimits& cell_limits) {
proto::CellLimits result;
result.set_num_x_cells(cell_limits.num_x_cells);
result.set_num_y_cells(cell_limits.num_y_cells);
return result;
}
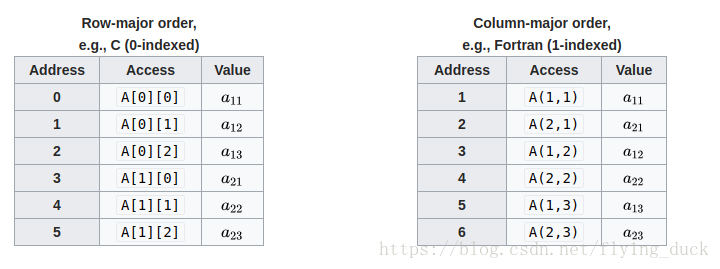
// Iterates in row-major order through a range of xy-indices.
class XYIndexRangeIterator
: public std::iterator<std::input_iterator_tag, Eigen::Array2i> {
public:
// Constructs a new iterator for the specified range.
XYIndexRangeIterator(const Eigen::Array2i& min_xy_index,
const Eigen::Array2i& max_xy_index)
: min_xy_index_(min_xy_index),
max_xy_index_(max_xy_index),
xy_index_(min_xy_index) {}
// Constructs a new iterator for everything contained in 'cell_limits'.
explicit XYIndexRangeIterator(const CellLimits& cell_limits)
: XYIndexRangeIterator(Eigen::Array2i::Zero(),
Eigen::Array2i(cell_limits.num_x_cells - 1,
cell_limits.num_y_cells - 1)) {}
XYIndexRangeIterator& operator++() {
// This is a necessary evil. Bounds checking is very expensive and needs to
// be avoided in production. We have unit tests that exercise this check
// in debug mode.
DCHECK(*this != end());
if (xy_index_.x() < max_xy_index_.x()) {
++xy_index_.x();
} else {
xy_index_.x() = min_xy_index_.x();
++xy_index_.y();
}
return *this;
}
Eigen::Array2i& operator*() { return xy_index_; }
bool operator==(const XYIndexRangeIterator& other) const {
return (xy_index_ == other.xy_index_).all();
}
bool operator!=(const XYIndexRangeIterator& other) const {
return !operator==(other);
}
XYIndexRangeIterator begin() {
return XYIndexRangeIterator(min_xy_index_, max_xy_index_);
}
XYIndexRangeIterator end() {
XYIndexRangeIterator it = begin();
it.xy_index_ = Eigen::Array2i(min_xy_index_.x(), max_xy_index_.y() + 1);
return it;
}
private:
Eigen::Array2i min_xy_index_;
Eigen::Array2i max_xy_index_;
Eigen::Array2i xy_index_;
};
} // namespace mapping_2d
} // namespace cartographer
#endif // CARTOGRAPHER_MAPPING_2D_XY_INDEX_H_我渐渐发现,代码不用注释,关键是里面一些轮子和原理我是没了解清楚的 那么的话 直接附上轮子原理,再加上总结
应该比较合适
1.
注释也要stateofart ,也没有个document的东西。
这个XYRANGFINDER是继承std::iterator的public
1.
input_iterator_tag
一个类,提供返回类型的iterator_category代表输入迭代器的函数。
结构 input_iterator_tag {};
类别标记类的用法与编译算法选择的相似。 模板函数需要查找其迭代器参数的最特定类别,以便它可以在编译时使用最高效的算法。 类型的每个迭代器Iterator, iterator_traits < Iterator > :: iterator_category必须定义的最具体的类别标记,用于描述迭代器的行为。
类型等同于迭代器< Iter> :: iterator_category时Iter描述一个对象来充当输入迭代器。
其实就是用来选迭代器的
std::iterator<std::input_iterator_tag, Eigen::Array2i>https://en.cppreference.com/w/cpp/iterator/iterator 这是关于迭代器的类似操作
而且这个好像在c++17要被淘汰了
https://eigen.tuxfamily.org/dox/group__QuickRefPage.html
Eigen::Array2i quick reference
这个应该是二位的整形数组
这个就是为栅格地图建索引的。
Eigen::Array2i min_xy_index_;
Eigen::Array2i max_xy_index_;
Eigen::Array2i xy_index_;
int num_x_cells = 0;
int num_y_cells = 0;
每个cell的bound 和index

















 1874
1874

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









