




 本文介绍了如何使用STM32的TIM2和TIM4进行编码器计数,包括不同计数模式配置、信号处理以及中断处理。详细讲解了正反转判断方法和编码器速度读取技巧。
本文介绍了如何使用STM32的TIM2和TIM4进行编码器计数,包括不同计数模式配置、信号处理以及中断处理。详细讲解了正反转判断方法和编码器速度读取技巧。
编码器正反转
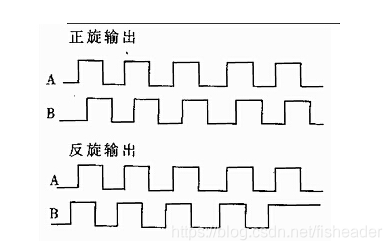
正转的时候信号线A先输出信号,信号线B后输出 A相超前B相90度 证明是正转
反转的时候信号线B先输出信号,信号线A后输出 B相超前A相90度 证明是反转
STM32编码器模式

三种模式
1.仅在TL1计数(A相)
2.仅在TL2计数(B相)
3.在TL1和TL2都计数(A相和B相都计数)
计数
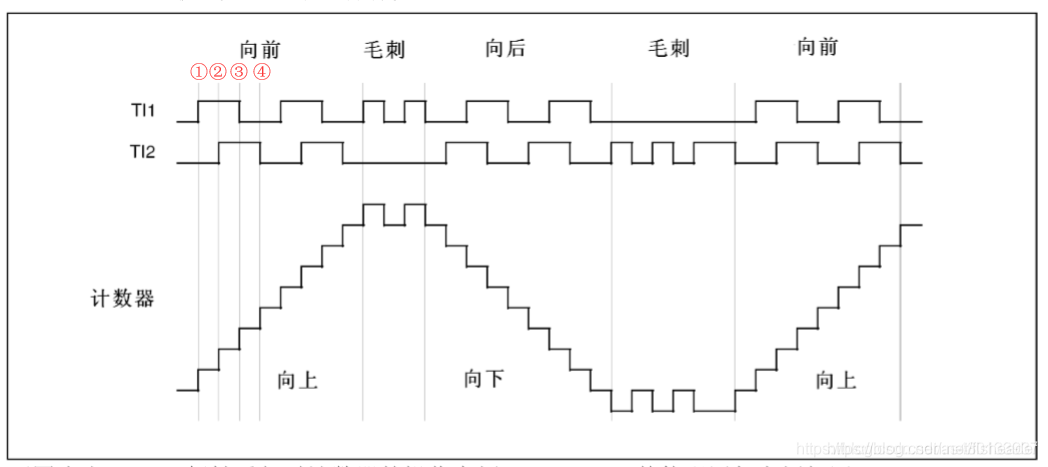
一个脉冲信号周期完成4次跳变。
1时刻:TI2为低电平,TI1上升沿跳变,计数器向上/向下计数;
2时刻:TI1为高电平,TI2上升沿跳变,计数器仍然向上/向下计数;
3时刻:TI2为高电平,TI1下降沿跳变,计数器仍然向上/向下计数;
4时刻:TI1为低电平,TI2下降沿跳变,计数器仍然向上/向下计数。
接线方式

编码器代码
/**********
初始化TIM2 编码器1
**********/
void Encoder_TIM2_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_ICInitTypeDef TIM_ICInitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING; //初始化PA0|PA1
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;
GPIO_Init(GPIOA,&GPIO_InitStruct);
TIM_TimeBaseStructInit(&TIM_TimeBaseInitStruct); //初始化TIM2
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
T 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3145
3145




 到【灌水乐园】发言
到【灌水乐园】发言







