







基于红外传感器(PIR)的存在检测系统虽然流行,但无法检测静止物体。本文介绍了一种DIY雷达控制的照明项目,该项目使用HLK-LD2410雷达模块,解决了PIR传感器存在的问题,能够实现真正的存在检测,即使在人体不移动的情况下也能保持灯光开启。通过介绍电路原理、组件选择、雷达配置等,本文提供了一个经济高效的解决方案,适用于家庭自动化系统中的楼梯照明等应用。
FMCW(Frequency-Modulated Continuous Wave)雷达是一种利用频率调制的连续波雷达技术。它通过发射连续波信号并对其频率进行线性调制来检测目标物体。
- 红外传感器(PIR)无法检测静止的人体,导致使用中存在一些问题。
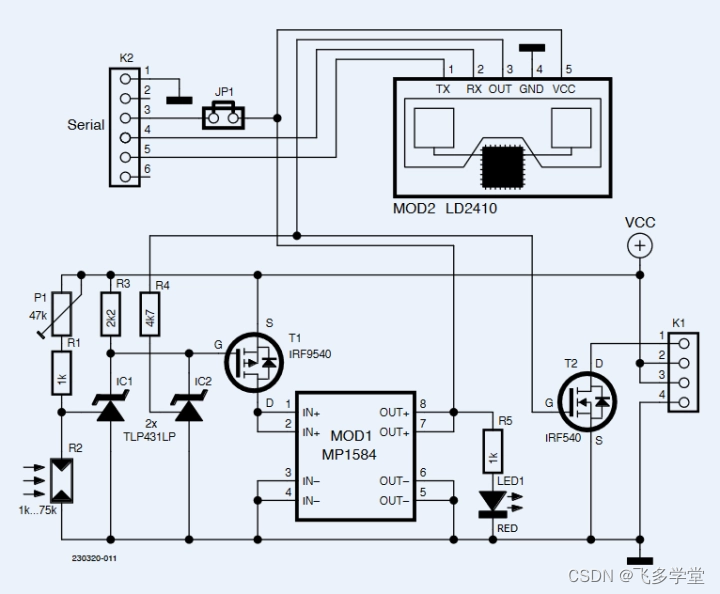
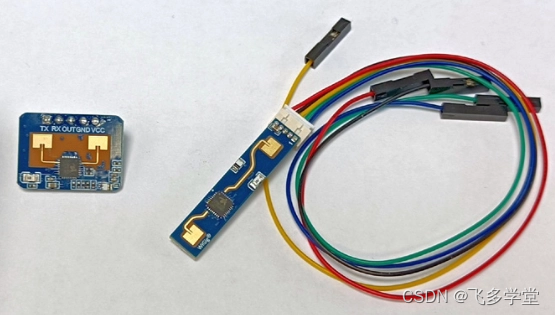
- HLK-LD2410雷达模块使用频率调制连续波(FMCW)雷达技术,能够检测移动和静止的物体。
 项目来源网址:https://www.elektormagazine.com/articles/presence-detection-radar-controlled-lighting
项目来源网址:https://www.elektormagazine.com/articles/presence-detection-radar-controlled-lighting


















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











